



紧凑型三路降压稳压器提供LDO驱动器和输出跟踪与排序
简介
典型的工业和汽车应用需要多路大电流、低压电源,以驱动从硬盘驱动器到微处理器等各种设备。LT3507三路降压转换器可轻松适用于这些应用。与多芯片解决方案相比,它更加简单且紧凑。
LT3507 是一款单芯片电流模式三路降压稳压器,内置内部功率开关和低压差线性稳压器驱动器。该开关转换器能够产生一路 2.4A输出 和两路 1.5A输出。所有三个转换器均同步至单个振荡器,其中 2.4A输出 与另外两个转换器反相运行,从而降低输入纹波电流。每个转换器均具有独立的关断和软启动电路,并在其输出处于稳压状态时生成电源正常信号,便于实现电源时序控制以及与微控制器和数字信号处理器的接口。各稳压器采用独立输入引脚,提供更高的灵活性;稳压器可级联以减小电路尺寸,或每个稳压器从不同的输入源取电。
开关频率通过一个单个电阻在250kHz至2.5MHz之间设置。高开关频率允许使用小型电感和电容,从而实现非常紧凑的三路输出电源。恒定开关频率结合低阻抗陶瓷电容,可实现低输出纹波。LT3507具有4V至36V的宽输入电压范围,可调节多种电源,包括5V逻辑电源轨、未经调节的壁式变压器、铅酸电池和分布式电源。
6伏至36伏输入转四个输出—1.8伏、3.3伏、5伏和2.5伏—单个集成电路
该三路降压转换器支持6V至36伏的输入电压范围,可分别提供高达2.4A、1.5A和1.5A的电流。20mA的LDO驱动器输出可驱动NPN晶体管,以提供第四路低噪声电源轨。图49.1显示
一种典型应用,可从6V–36V输入电源提供四个输出:1.8V @ 2.4A、3.3V @ 1.3A、5.0V @ 1.5A和2.5V @ 0.2A。
即使在高 VIN/VOUT 比率下仍具有低纹波和高频工作性能
高频工作可减小解决方案的尺寸,但单片降压型稳压器在高压(36伏)、高频(MHz)工作时存在一个障碍,即最小导通时间限制。由于存在内部逻辑传播延迟,降压型稳压器必须保持一个最短的导通时间才能正常工作。否则,在输入输出电压比较高时,转换器将进入跳脉冲模式,这
会产生增加输出纹波的不良副作用。例如,图49.1中的应用在输入为36伏、输出为1.8伏时,最适宜在450千赫下工作。
然而,LT3507 内置了解决此问题的方案。通过将第一个转换器与另外两个级联,如图49.2所示,所有三个转换器均可在不进入跳脉冲模式的情况下以 2兆赫 运行。
输入电压闭锁和时序控制
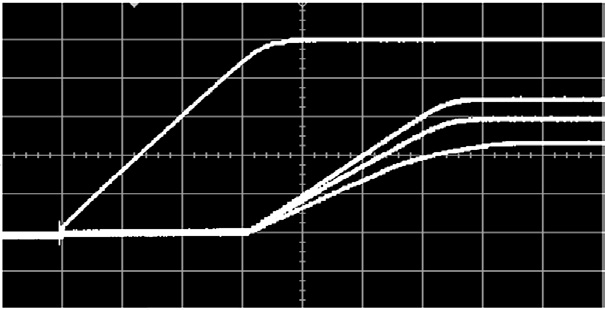
LT3507的欠压和过压闭锁可通过外部电阻进行编程。当图49.2中的原理图按图49.3修改后,LT3507可接受高达IN 36伏的VIN ,但仅在V为8伏至18伏之间时工作。这可以防止集成电路在非预期或故障条件下运行,使电路设计师能够减小外部元件的尺寸。图49.3 还展示了一种简单的时序控制方案:通道1的电源正常指示器连接到其他三个通道的跟踪引脚。图49.4 显示了相应的启动序列,其中通道1首先启动,其余通道在其启动期间进行跟踪。数据手册中还可找到其他时序和跟踪示例。
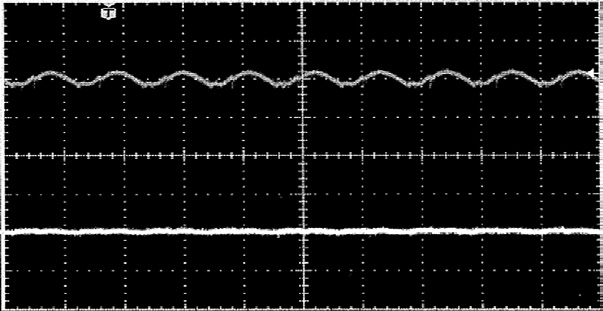
LT3507的另一项特性是低噪声LDO输出。图49.5显示, LDO输出纹波相较于预稳压通道2输出有所降低。
结论
LT3507 将三个降压稳压器和一个 LDO驱动器 集成在 QFN(5mm × 7mm)封装中,为 多轨系统 提供了 紧凑型解决方案。每个转换器具有 独立输入,提供了广泛的设计自由度,而独立的 电源正常指示器 和 TRK/SS引脚 进一步增强了 跟踪和时序灵活性。

















 3108
3108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









