



RoboticsDiffusionTransformer(简称RDT)开源地址:https://github.com/csq-ing/RoboticsDiffusionTransformer?tab=readme-ov-file
本文展示了在ManiSkill中运行RDT模型跑五个基准任务:PegInsertionSide、PickCube、StackCube、PlugCharger 和 PushCube的具体步骤。
一.环境配置
1.基础环境配置
这一步基本复制原文
但是直接用pip install flash-attn --no-build-isolation下载的是最新版本的flash-attn,而RDT中有用到以前版本的一个函数,如果下载最新版的会报错因此建议用
pip install flash-attn==2.3.0 --no-build-isolation指定版本。
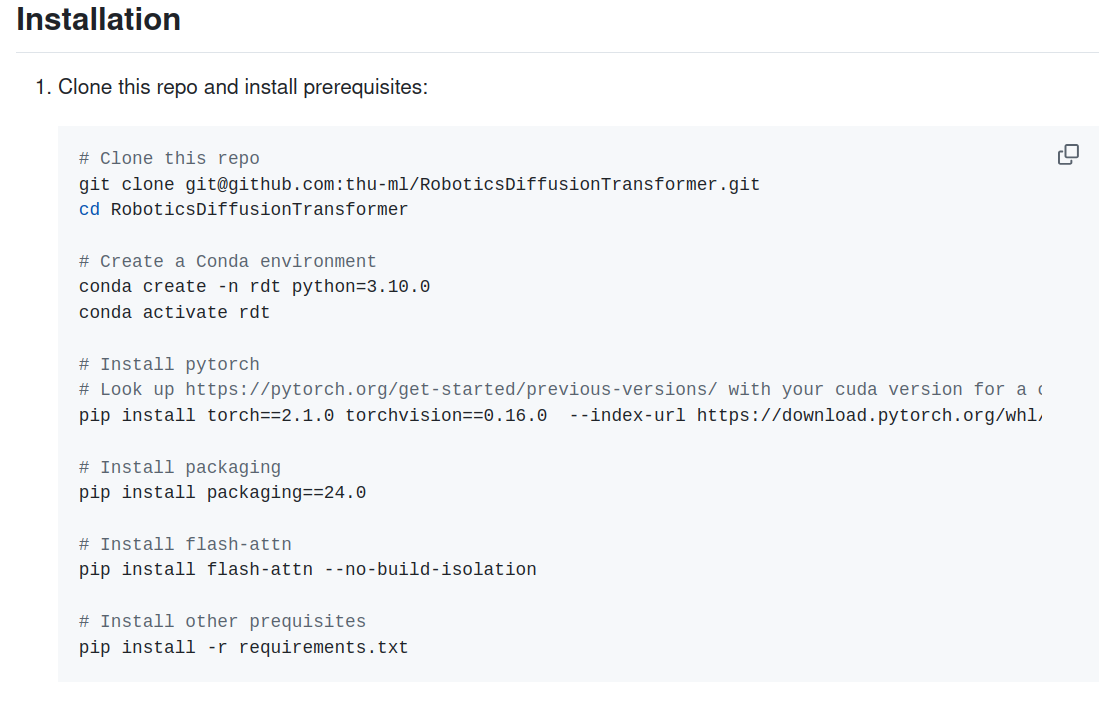
总体运行步骤是这样的:
git clone git@github.com:thu-ml/RoboticsDiffusionTransformer.git
cd RoboticsDiffusionTransformer
conda create -n rdt python=3.10.0
conda activate rdt
pip install torch==2.1.0 torchvision==0.16.0 --index-url https://download.pytorch.org/whl/cu121
pip install packaging==24.0
pip install flash-attn==2.3.0 --no-build-isolation
pip install -r requirements.txt建议一步一步运行。
2.仿真环境配置
对应原文
conda activate rdt
pip install --upgrade mani_skill
sudo apt-get install libvulkan1
sudo apt-get install vulkan-tools
vulkaninfo最后一句vulkaninfo是用来测试libvulkan1是否下载成功的。
然后从这里下载Hugging Face 仓库微调后的模型权重。下载后直接放在克隆到本地的RoboticsDiffusionTransformer文件夹中就可以了。
二.预计算配置
如果GPU显存不够(大概需要40多G)建议使用源代码中推荐的预计算,即提前将语言指令转换成模型能理解的数学向量(嵌入),并把这个结果保存到硬盘上。这样,在实际运行机器人时,就无需再进行这个转换过程了。
1.下载预计算语言嵌入文件
点击这里,就可以下载五个基准任务:PegInsertionSide、PickCube、StackCube、PlugCharger 和 PushCube的预计算语言嵌入文件了。下载完后也是放在克隆到本地的RoboticsDiffusionTransformer文件夹中。
2.代码修改
(1).将eval_sime中val_rdt_maniskill.py
policy = create_model(
args=config,
dtype=torch.bfloat16,
pretrained=pretrained_path,
pretrained_text_encoder_name_or_path=pretrained_text_encoder_name_or_path,
pretrained_vision_encoder_name_or_path=pretrained_vision_encoder_name_or_path
)改为
policy = create_model(
args=config,
dtype=torch.bfloat16,
pretrained=pretrained_path,
pretrained_text_encoder_name_or_path=None, # 关键:设为 None 表示不加载 T5
pretrained_vision_encoder_name_or_path=pretrained_vision_encoder_name_or_path
)(2).将scripts中maniskill_model.py
def get_text_encoder(self, pretrained_text_encoder_name_or_path):
text_embedder = T5Embedder(from_pretrained=pretrained_text_encoder_name_or_path,
model_max_length=self.args["dataset"]["tokenizer_max_length"],
device=self.device)
tokenizer, text_encoder = text_embedder.tokenizer, text_embedder.model
return tokenizer, text_encoder改为
def get_text_encoder(self, pretrained_text_encoder_name_or_path):
# 新增:如果传入 None,则不加载文本编码器
if pretrained_text_encoder_name_or_path is None:
return None, None
# 返回空的 tokenizer 和 model
text_embedder = T5Embedder(from_pretrained=pretrained_text_encoder_name_or_path,
model_max_length=self.args["dataset"]["tokenizer_max_length"],
device=self.device)
tokenizer, text_encoder = text_embedder.tokenizer, text_embedder.model
return tokenizer, text_encoder将
def reset(self):
"""Set model to evaluation mode.
"""
device = self.device
weight_dtype = self.dtype
self.policy.eval()
self.text_model.eval()
self.policy = self.policy.to(device, dtype=weight_dtype)
if self.text_model is not None:
self.text_model = self.text_model.to(device, dtype=weight_dtype)
self.vision_model = self.vision_model.to(device, dtype=weight_dtype)
改为
def reset(self):
"""Set model to evaluation mode.
"""
device = self.device
weight_dtype = self.dtype
self.policy.eval()
#self.text_model.eval()
if self.text_model is not None:
self.text_model.eval()
self.vision_model.eval()
self.policy = self.policy.to(device, dtype=weight_dtype)
if self.text_model is not None:
self.text_model = self.text_model.to(device, dtype=weight_dtype)
self.vision_model = self.vision_model.to(device, dtype=weight_dtype)
三.保存视频
如果需要保存视频,可以按一下步骤将仿真过程保存为mp4视频文件。
以下步骤都在eval_sime中val_rdt_maniskill.py 中处理。
1.导入视频处理库
在代码顶部添加 imageio 库(用于合成视频)和 os 库(用于创建目录):
import imageio
import os2.修改参数解析,添加视频保存相关参数
在 parse_args 函数中添加 --save-video(控制是否保存)和 --record-dir(保存目录)参数:
def parse_args(args=None):
parser = argparse.ArgumentParser()
# ... 已有的其他参数 ...
# 添加视频保存参数
parser.add_argument("--save-video", action="store_true", help="Whether to save simulation videos")
parser.add_argument("--record-dir", type=str, default="simulation_videos/rdt", help="Directory to save videos")
return parser.parse_args()3.创建视频保存目录
在循环开始前(for episode in tqdm.trange(total_episodes): 之前),创建视频保存目录:
# 处理视频保存目录
if args.save_video:
os.makedirs(args.record_dir, exist_ok=True)
print(f"Videos will be saved to: {args.record_dir}")4.视频合成
在
print(f"Trial {episode+1} finished, success: {info['success']}, steps: {global_steps}")之前,添加视频合成代码:
# 保存视频(如果启用了 --save-video)
if args.save_video and len(video_frames) > 0:
# 生成视频文件名(包含任务名、episode编号、成功状态)
video_filename = f"{args.record_dir}/{env_id}_episode_{episode+1}_success_{info['success']}.mp4"
# 保存视频(帧率设为30)
imageio.mimsave(video_filename, video_frames, fps=30)
print(f"Video saved to: {video_filename}")四.运行评估脚本
如果需要保存仿真视频,运行
python -m eval_sim.eval_rdt_maniskill \
--env-id StackCube-v1 \
--pretrained_path ./mp_rank_00_model_states.pt \
--save-video \
--record-dir "simulation_videos/rdt"
如果不需要保存,删除后面两行,运行
python -m eval_sim.eval_rdt_maniskill \
--env-id StackCube-v1 \
--pretrained_path ./mp_rank_00_model_states.pt \其中:
参数: --env-id StackCube-v1指定要评估的仿真环境(任务),如果要运行其他任务,只需要将它修改它就可以了,比如: --env-id PickCube-v1。
参数: --record-dir "simulation_videos/rdt"指定视频的保存目录,如果要将视频保存到其他地方只需要修改它就可以了。
五.其他报错
1.huggingface版本过高
现象:
ImportError: cannot import name '__version__' from partially initialized module 'huggingface_hub' (most likely due to a circular import) (/root/miniconda3/envs/rdt/lib/python3.10/site-packages/huggingface_hub/__init__.py)
解决方法:
# 激活 rdt 环境(确保在正确环境中操作)
conda activate rdt
# 卸载两个库
pip uninstall -y huggingface_hub diffusers
# 安装指定版本(确保兼容性)
pip install "huggingface_hub==0.18.0" "diffusers==0.20.0"
# 验证库是否正确安装
pip list | grep -E "huggingface_hub|diffusers"2.内存不足
创建交换文件:
# 1. 创建 50GB 空文件(/swapfile 为交换文件路径,可自定义)
sudo fallocate -l 50G /swapfile
# 若 fallocate 报错,用 dd 命令替代(速度稍慢,但兼容性更好):
# sudo dd if=/dev/zero of=/swapfile bs=1G count=50
# 2. 设置文件权限(仅 root 可读写,避免安全风险)
sudo chmod 600 /swapfile
# 启用指定的交换文件(路径需与创建的文件一致)
sudo swapon /swapfile
# 验证是否启用成功(若输出包含/swapfile,说明启用成功)
swapon --show
# 或通过free命令查看(Swap行的total会显示交换文件大小)
free -h如果需要设置开机自动启用
设置开机自动启用
sudo nano /etc/fstab
文件末尾添加一行
/swapfile swap swap defaults 0 0
Ctrl+O确认保存,回车,Ctrl+X退出编辑器
执行以下命令验证配置是否正确(无报错则说明配置有效):
sudo mount -a

















 4233
4233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









