




1.常见坐标系
SLAM中常见的坐标有:
- /odom
- /fix
- /lidar
- /base_link
- /imu
2.GPS到UTM坐标系的转换
建图的过程中,会用到GPS的信息,较准的GPS信息能够对Lidar帧与帧之间的关系添加constraint,从而提高建图回环的成功率。
实际在用的GPS中的经纬度信息,会转换成UTM坐标系(xy坐标系),这部分的内容可以自行上网找资料。
3.map坐标系
UTM坐标系反应的是世界上的绝对坐标,建图结束之后所生成的地图,需要能够准确地定位到在地球上的位置,这个定位将决定UTM坐标系到map坐标系的transformation关系。
注意,这里的UTM到Map的映射是固定的,一旦地图构建完毕,两者之间的映射将不会再改变。
而确定的方法则是在建图开始时,机器人所在的位置设置为原点,即map的原点,这个点的信息由GPS转换为UTM所得。这样的话只确定了平移,旋转量则由偏航角提供,而偏航角一般是由车载的两个GPS做差而得。
确定了起始点的平移和旋转量,UMT到Map的transformation即可确定。
4.理解odom坐标系的漂移
若是odom是理想的,没有漂移,那么理想情况下如下图所示:
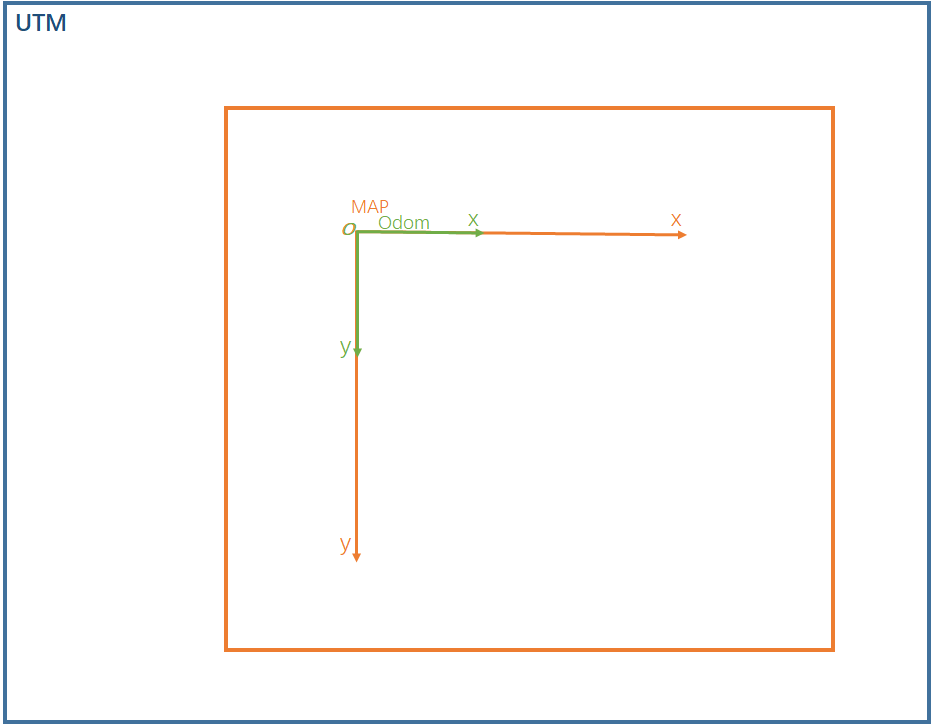
实际情况是odom会随着时间的增加,odom到map之间会不
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+







 到【灌水乐园】发言
到【灌水乐园】发言







