1. 下载模型
https://github.com/osrf/gazebo_models
mkdir -p ~/.gazebo/models/hammer
https://github.com/osrf/gazebo_models/blob/master/hammer/
https://github.com/osrf/gazebo_models/blob/master/monkey_wrench/
https://github.com/osrf/gazebo_models/blob/master/bowl/
2. 启动仿真
ros2 launch ur_simulation_gazebo ur_sim_control.launch.py ur_type:=ur5 launch_rviz:=false
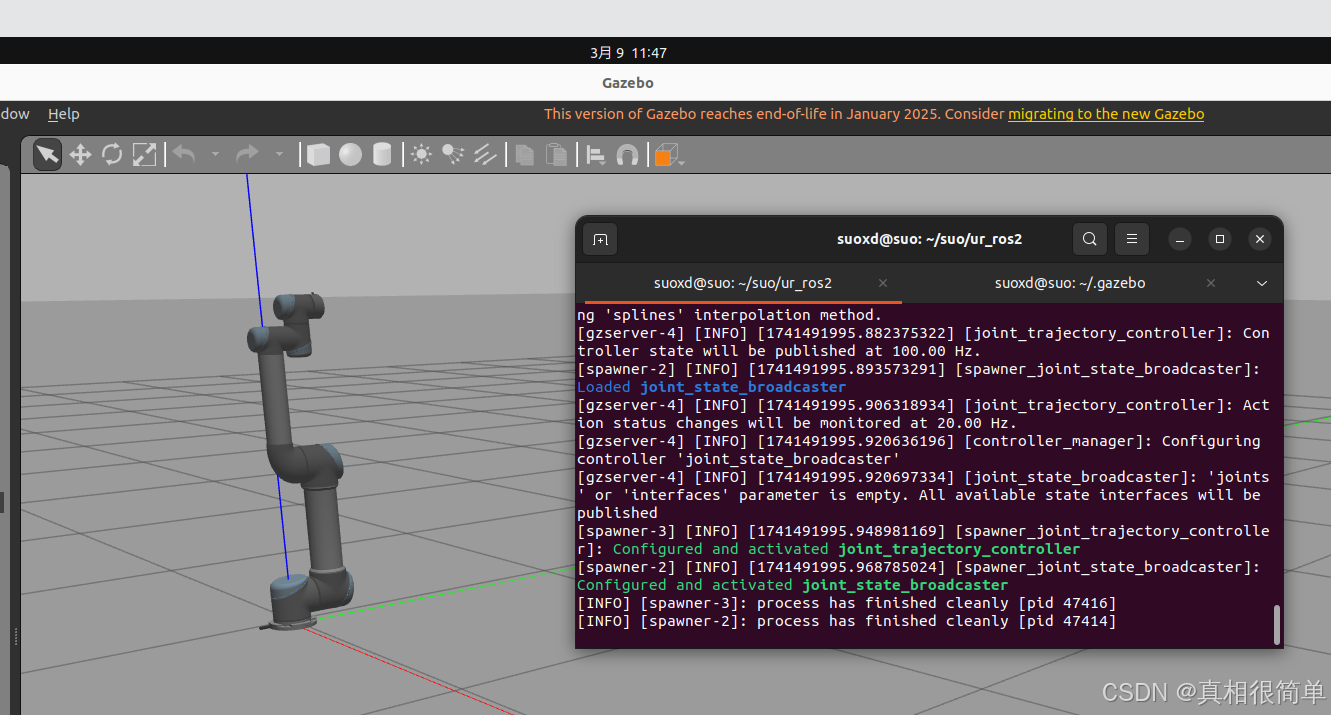
3. 加入模型
gz model --spawn-file ~/.gazebo/models/table/model.sdf -m table -x 1.5
gz model --spawn-file ~/.gazebo/models/hammer/model.sdf -m hammer -x 2.0 -z 1.5
gz model --spawn-file ~/.gazebo/models/bowl/model.sdf -m bowl -x 1.5 -z 1.3
gz model --spawn-file ~/.gazebo/models/monkey_wrench/model.sdf -m monkey_wrench -x 1.2 -z 1.3




























 640
640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











