



传感器
田综述间作业农业机器人
斯皮罗斯·丰塔斯 1,*,尼科斯·米洛纳斯 1,约阿尼斯·马卢纳斯 1,埃夫西米奥斯·罗迪亚斯 1,克里斯托夫·赫尔曼·桑托斯 2和埃里克·佩基耶特 3
1雅典农业大学,希腊雅典伊拉奥多斯75号,11855;nmylonas@aua.gr(N.M.); gmalounas@aua.gr(I.M.);efthimisr@yahoo.gr(E.R.)2弗劳恩霍夫IPA,德国斯图加特诺贝尔 大街12号,70569;christoph.hellmann.santos@ipa.fraunhofer.de3瓦赫宁根植物研究所,瓦赫宁根 大学与研究,荷兰瓦赫宁根,邮政信箱644,6700AP;erik.pekkeriet@wur.nl*通讯作者: sfountas@aua.gr
收到日期:2020年3月30日;接受日期:2020年5月5日;发表日期:2020年5月7日
摘要
现代农业与近几十年来一系列技术(如信息学、传感器、导航)发生的革命密切相关。在作物生产系统中,某些田间作业由于其复杂性,或因其涉及对植物/可食用产品的敏感交互,或因在整个作物生产周期中需要重复操作,而变得非常耗费人力。这些是农业机器人发展的关键因素。本文对用于作物田间作业的研究和商用农业机器人相关文献进行了系统综述。该研究强调,最受关注的机器人系统集中在收获和除草方面,而病害检测和播种机器人则研究较少。农业机器人的优化与进一步发展至关重要,应通过开发更快的处理算法、改善机器人平台与机具之间的通信以及先进传感系统来推动其进步。
关键词 :作物;自动驾驶车辆;田间作业;感知;执行
1.引言
近年来,农业领域的重大技术进步极大地改变了作物和畜牧生产系统中的多个流程。这些进步主要涉及运营和生产成本的最小化、环境影响的降低以及整体生产周期的优化。在作物生产方面,目前已开发出一系列针对田间作业层面的优化模型和软件工具。这一进展与田间机械的技术进步和设备发展相结合,为现代农民面临的诸多挑战提供了根本性的解决方案。在作物生产系统中,最突出的问题之一与人力密集型作业相关。这些作业主要是田间任务(如精细果实采收和行内杂草控制),传统田间机械难以完成,因而依赖人类工人。这促使了对自主拖拉机和机器人平台在作物田间作业中应用的需求不断增加,目前这些技术仍处于研究阶段[1]。
农业中的田间作业相当复杂,需要解决各种问题才能有效过渡到机器人时代。为了构建机器人解决方案,应针对田间作业进行整体系统分析,并结合成本效益分析[2,3]。此类系统必须满足非常具体的要求,例如轻量化、小型化、自主性、智能、通信、安全和适应性,以有效执行潜在任务[4]。与传统拖拉机相比,自主机器的尺寸相对较小以及机具,有助于减少与土壤相关的问题,特别是由大型重型现代农业机械引起的土壤侵蚀和土壤压实[5]。为了实现这些田间作业的自动化,需要对这些任务进行分解,将其转化为离散的机器人功能。这可以通过将农业任务分类为确定性(可预先设计和优化的任务)和反应性(与需应对意外情况的行为相关的任务)来实现[6]。
农业机器人面临的主要挑战与通用问题和任务特定问题相关。通用问题涉及地形评估[7,8],路径规划[9,10],安全问题,特别是人体检测[11],以及机器人集群[11–13]。任务特定问题则与作物结构、作物或害虫检测与分类以及精准投入应用相关的规格有关。这些问题大多与视觉系统、机器人驱动系统、半结构性农业环境中的导航系统,以及控制机器人平台和农机具的智能有关。
已有若干综述聚焦于针对特定任务(如农业导航、移栽/播种、修剪、杂草控制、收获、可追溯性及多机器人交互)和系统评估[14]的田间作业农业机器人。一项研究综述了仅应用于开放旱作农业系统中的田间作业[15],,同时也有综述探讨了主要商用农业机器人的数字视角[16]。此外,还有一篇简要综述基于方法论方法、田间作业和农业环境,并结合农业机器人技术的仿真工具进行了阐述[17]。由于杂草控制机器人是目前发展最为成熟的农业机器人之一,已有专门针对自主杂草控制系统的综述 [18],,同时也有关于应用于草莓的机器人系统的作物特异性文献综述[19]。尽管这些综述具有重要的科学贡献,但本研究的贡献在于提供一个整体综述,涵盖执行所有主要田间作业、适用于各类种植系统以及露天田地和温室环境中的农业机器人系统。
本文旨在研究与作物生产中主要田间作业相关的具体问题。更具体地说,本次综述所关注的主要挑战包括:(i)针对不同作物生产系统,识别并强调目前已开发的用于各项田间作业的机器人系统;(ii)推动现有农业机器人系统的进一步发展与优化,特别是更智能的感知与驱动系统的开发;(iii)提出未来农业机器人发展的关键挑战和发展方向。
本综述涵盖了应用于不同农业环境(旱地、温室、葡萄园和果园)中各种田间作业(如除草、播种、病害检测、作物巡查、喷洒和收获)的科研与商用农业机器人系统。ff本文的结构如下:第2节展示了本综述所采用的框架;第3节对主要田间作业子章节进行了作业分类与分析;最后,第4节呈现了总体讨论,第5节强调了一般性结论。
2.审查框架
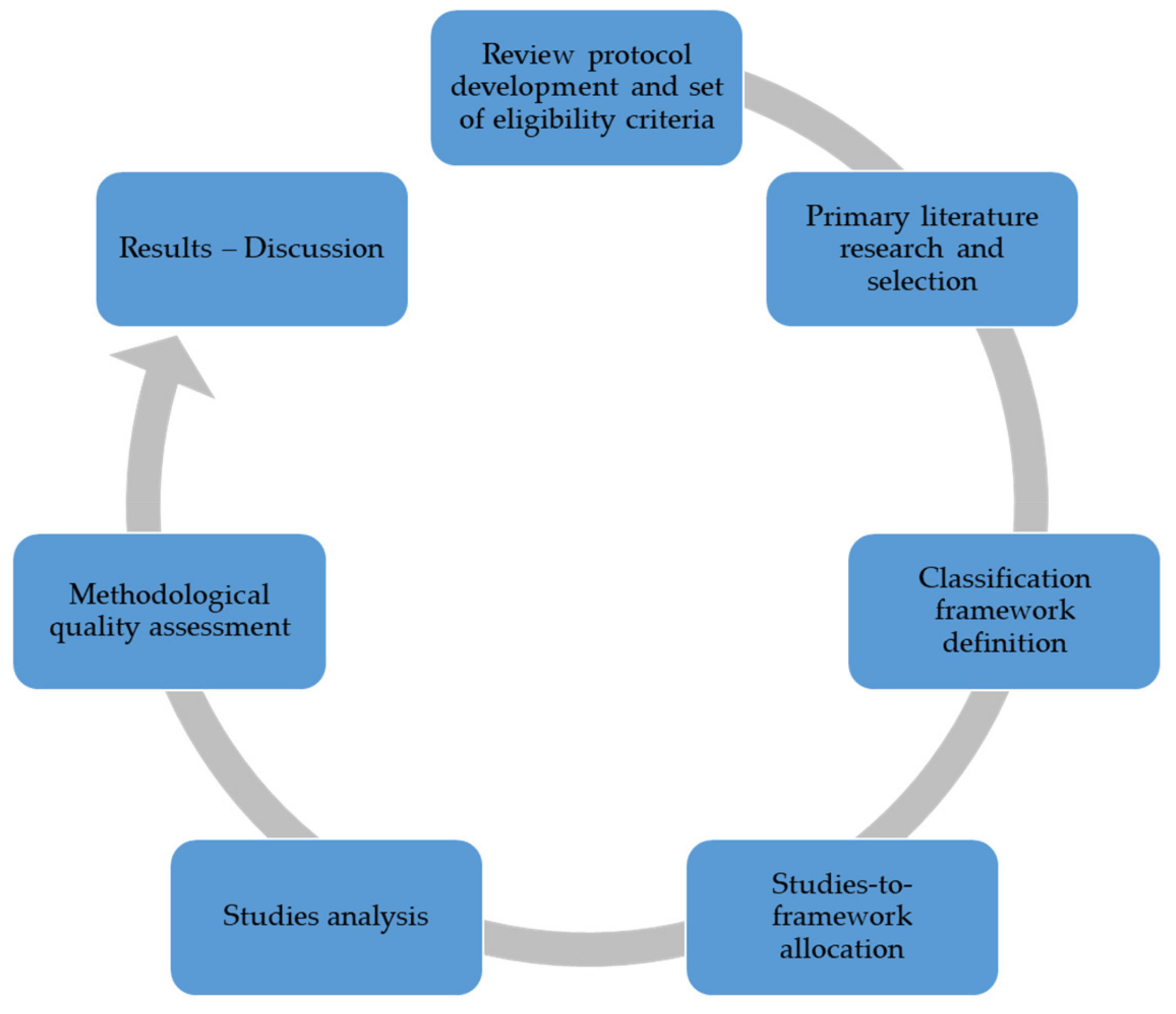
在本次综述的预处理阶段,考虑了一系列理论考量。在整个分析过程中,建立了以下步骤,如图 1所示:(i)制定关于纳入标准的综述方案;(ii)搜索研究文献和商业资源,并选择符合纳入标准的文献和资源;(iii)定义应用于文献综述的分类框架,以对材料进行分类并构建结构;(iv)选择要纳入分类框架各个类别的研究;(v)对所选研究的分析;以及(vi)通过比较研究来呈现结果。

关于纳入标准,本研究纳入了与应用于作物生产系统的机器人系统相关的研究,作为本研究的广泛边界。更具体地说,所纳入的参考文献应与在农业作物生产系统中执行特定田间作业的机器人系统相关。所引用的机器人系统可能是在各种环境中开发的(即露天田地、温室、实验室等)。因此,这些系统应适用于任何田间操作,但不包括非田间运输作业。
此外,设定了若干与文献相关的纳入标准需遵循:(1)工作应以英语发表;(2)所纳入的研究应为发表在科学期刊、会议录或其他来源(商业网站、研究项目等)中的研究论文;(3)应于过去 20年内发表(不含当前年份),因为在此之前的任何技术如今可能已过时。非研究论文类型的期刊出版物(如综述)不在本综述范围内,将被排除。
所纳入的研究来自开放在线资源(如开放获取期刊、网站、会议录等),并通过在多个电子数据库(即WebofScience、ScienceDirect、Scopus和SpringerLink)中进行系统性文献综述获得。初步文献研究于2019年底完成,因此可能会遗漏任何新出现的出版物。鉴于所审查领域的特性,作者有意纳入灰色文献(技术/研究报告、博士学位论文等),以尽可能全面地涵盖本综述的内容。
3.作业分类与分析
根据主要田间作业,现有文献中农业田间作业的机器人系统被分为以下几类:(1)除草,(2)播种,(3)病虫害检测,(4)作物巡查(植物监测与表型分析),(5)喷洒,(6)收获,(7)植物管理机器人,以及(8)多功能机器人系统[4]。鉴于当前文献范围较广,本文基于科学和商业资源对最重要文献进行了简要总结,并按上述类别列于下文。
3.1.除草机器人系统
除草是作物生产周期中最重复、最乏味且最耗时的活动之一。特别是在发展中国家和小农户农场,杂草管理占用了超过40%的劳动力投入effort[20]。除草不仅是其中最困难的任务之一,也是成本最高的田间作业,其成本包括显著的劳动力成本,尤其是在劳动密集型作物中。此外,由于大量使用除草剂以保持田间无杂草、促进植物健康和提高产量,该田间作业对环境造成了重大负面影响。例如,据估计,全球水稻、小麦和玉米的潜在产量损失中,杂草导致的损失占46.2–61.5%,而在所有害虫共同造成的实际产量损失中,杂草占27.3–33.7%[21]。基于上述所有原因,私营企业和学术界均对除草机器人给予了高度关注。已有研究对其进行了简要综述[22],而本研究则针对包括除草机器人在内的主要田间作业开展了更广泛的综述。
传统上,除草有两种方法:机械除草和化学除草。机械除草是指通过拔除、焚烧或切割等方式破坏杂草植物的任务。针对上述三种机械除草方法,已有多种工具可供使用。为了通过机械方式去除杂草,系统首先应检测其将要工作的行间,然后进行杂草的切割或拔除。在机械除草机器人中记录的行间检测精度小于25毫米[23,24],,其他系统的精度则小于6毫米[25,26],或更高,可达3厘米[27,28]。此外,杂草去除的性能(也称为除草效率)已在一些系统中得到评估,这些系统的除草效率高于90% [24,29],,以及两种不同方法分别达到65%和82%[30]。除此之外,还有一系列主要是商用机械除草机器人,但未提供其性能指标[31–34]。
另一方面,化学除草是指喷洒具有毒性作用的除草剂来消灭杂草,因其所需劳动力显著较少而广受欢迎。除草剂制造商还开发了仅对杂草有毒而对作物无害的活性成分,从而可以对整个田地进行广泛喷洒。然而,由于对环境和人类健康的负面影响,许多化学物质(尤其是在欧盟)已经受到使用限制,或将在不久的将来受到限制。此外,杂草已经产生了化学抗性,使其更难被根除。为减少除草剂造成的污染并延缓抗性杂草的出现,提出的主要解决方案是选择性/点喷,即仅喷洒杂草而非整个田地。但这将需要投入更多的工时用于除草。好消息是,近年来计算机视觉技术的发展使制造商能够实现该过程的自动化,并将高级软件集成到喷洒/除草机器人中。
与机械除草机器人类似,系统在识别杂草方面的效果是化学除草机器人最关键的性能指标之一。通过使用按需喷洒(DoD)系统——一种可检测植株行内杂草并选择性地将除草剂液滴喷洒到这些杂草叶子上的系统——实现了100%的效果,这是化学除草机器人中的最高水平[22,35]。同时,在另一款基于视觉的除草机器人进行的两次实验中,分别展示了98%和89%的检测精度[36]。最后, EcoRobotix除草机器人强调在理想条件下其效果(杂草检测与清除)超过85%[37]。尽管目前已有多个商业化学除草机器人系统上市,但几乎不存在公开的性能指标[38–41]。用于除草的感知传感器表现出相似的性能水平。所有机器人均使用摄像头,其中RGB(红绿蓝)、红外(IR)和网络摄像头最为常用。此外,还存在一些传感器可帮助机器人识别周围环境及其相对于杂草的位置,例如声学距离传感器、陀螺仪、激光测距仪、惯性测量单元(IMU)等。表1列出了最重要的化学和
3.2.播种
播种是作物生产周期中的一项基本任务,且对劳动力成本有显著影响。播种机械已发展出精量播种解决方案。由于近期发表的研究表明植株密度对高产具有重要意义[43],因此精量播种在科学界获得了更多关注,这也促使近年来开发出了多种播种机器人(表2)。
现有文献中提出的主要性能指标要么与准确率(%)相关,即准确放置的种子数量,要么与位置误差相关。目前已报道的播种机器人的主要目标作物主要是谷物,且要求高准确率。
关于小麦和水稻作物的报道速率[44,45]。另一方面,已提出一种更适合湿田的自主播种机器人,但缺乏性能指标[46]。最后,芬特在商业播种机器人方面取得了进展[47,48],,可作为智能机群或单个单元使用。播种最重要的信息是种子种植的深度和位置。因此,力、压力、角度和位移传感器与轮式编码器、罗盘和位移传感器结合使用。
3.3.病虫害检测
机器人应用在病虫害管理(检测与控制)方面最近引起了关注,因其复杂性以及缺乏准确高效的常规系统。病害检测是生产周期中的重要环节,因为如果在早期未能检测到疾病,可能会造成严重的经济损失。虫害检测尚未受到广泛关注,因为许多昆虫位于叶片下方、芽内甚至地下,这使得准确检测它们并进而监测它们变得极为困难。在表3中,展示了针对多种作物和疾病的各项研究中主要的感知特征及最高检测准确率。
病害检测主要是一项视觉任务,因此所有机器人均配备了基于视觉的系统。检测精度定义为已识别的病株数量与病株总数之比。所有综述中的机器人均使用了低成本且易于操作的彩色相机,第二常用的相机类型是多光谱相机,属于中等成本,且需要复杂的高计算能力。原则上,所有配备多/高光谱传感器的系统配置均结合了彩色相机。值得注意的是,使用更复杂的系统并不总能获得最佳结果。在温室辣椒植株的白粉病和番茄斑萎病毒(TSWV)检测中,使用彩色相机表现出较高的精度,而使用多光谱相机对这两种疾病检测的精度分别为80%和61%[51,52]。对于橄榄树中Xylelaf astidiosa的检测,则引入了一种不同的方法,即融合一系列传感器[53]。
更简单的病害检测机器人主要基于RGB图像输入。在这方面,一种基于人工云光照条件的机器视觉系统已用于检测草莓植株上的白粉病叶病,在两种不同的光照条件下准确率达到了72–95%ff。同样, RGB相机已被用于番茄和水稻植株上的Pyralidae虫害检测,准确率约为94%[55]。此外, eAGROBOT被用于检测一系列疾病,对棉花植株和花生植株的检测准确率均达到约90%[56]。
3.4.作物巡查
3.4.1.植物活力监测
植物监测是种植者为确保高产和优质而长期采用的最古老实践。迄今为止,植物胁迫的监测主要依赖于寻找可见症状,例如叶子或整株植物出现变色、枯萎、斑点或其他异常。然而,随着遥感技术的进步,新的传感器正逐渐为种植者所用,能够在人类肉眼无法察觉的情况下监测植物健康和胁迫状况。如今,热成像相机和红外温度计被用于测量冠层温度[59]。此外,通过组合不同波长,可利用多种植被指数(如比值植被指数(RVI)、归一化差异植被指数(NDVI)[60],等),获取有关植物健康状况、光合能力等方面的有用信息。而且,昂贵的高光谱传感器也开始在植物监测系统中得到应用 [61]。
迄今为止,尽管植物监测机器人仍处于较低的成熟度水平,但由于所使用传感器的成本较高,因此主要关注高价值作物以及机器人系统如何有效取代人工完成监控任务。表4中列出了多种植物监测机器人。
大多数作物监测机器人是专门为果园/树木作物或葡萄园开发的。一种作物监测机器人已在实验室条件[62]和半结构化环境[63],中进行了实验评估,证明通过使用一系列传感器可高度可靠地估算果园树冠体积和活力。针对葡萄园的作物监测机器人已得到广泛开发,尽管目前尚无明确量化的性能指标。其中大多数为商业作物监测机器人(如[64]),或在欧盟资助项目下开发的机器人([65–67])。在所有情况下,机器人都配备了多种视觉相关传感器,例如各类摄像头(RGB、高光谱、多光谱等)以及激光雷达传感器,以监控植物的体积、植被覆盖和健康状况。鉴于葡萄园通常种植于丘陵或山区地形,葡萄园监测机器人面临一系列与地形通过、地图构建和定位相关的挑战[68]。
类似的感知系统已应用于油菜等作物的作物监测机器人,其最大测量误差可达2.5%[59]。在此特定情况下,该平台安装在割晒机上。此外,Earthsense已商业开发了Terrasentia作物监测机器人,适用于玉米、大豆、小麦等多种作物[69]。
更通用的作物监测机器人可处理农业操作,例如土壤采样[70]。CO2浓度水平可能对作物生长产生显著影响。在此范围内,已开发出一种六足机器人,用于收集农艺信息,如土壤养分和植物生长情况。所监控的CO2浓度水平高达2500ppm[71]。
3.5.喷洒
除了使用除草剂喷雾器进行杂草管理外,喷洒机器人还可用于防治害虫(病害和昆虫)以及施用液体肥料(叶面肥)。因此,无论采取何种防护措施,农民都会接触到大量有毒活性成分。因此,引入喷洒机器人以防止可能的健康危害至关重要。由于计算机视觉和人工智能的快速发展,与传统在作物上均匀喷洒相比,机器人喷雾器配备了新型智能系统,能够实现选择性喷洒。机器人可以利用这些技术,减少农业对环境的影响以及消费者接触农药的情况,并防止目标生物对这些物质产生抗性。喷洒机器人的概述见表6。
在设计喷洒机器人时,已提出了多种方法,这主要取决于操作环境的限制和可能性。在温室中,已确定了两种方法:一种是利用温室管道系统移动的机器人[83,84],,另一种是在行间导航且不安装在这些管道上的机器人[85–87]。此外,实现选择性喷洒需要配备精确检测系统,因此必须在机器人上安装先进传感器[88,89]。最后,喷洒系统(喷嘴)可直接安装在喷洒平台[83–87,90],上,也可安装在具有不同自由度(DOF)的机器人机械臂上。[91]所使用的机械臂具有3自由度,[89] 6,所使用的机械臂则不同,而[88]所使用的机械臂具有9自由度。
根据提供的结果,喷洒操作的执行时间被列出[86,89],,而在大多数情况下报告了系统有效性。通过提供成功喷洒率、系统误差[85,87],或两者性能指标[83,88,90]来展示系统的有效性。最后,只有少数系统考虑对待喷洒区域进行实时检测[88–90],,而大多数系统未包含实时检测[83,85–87,91]。
3.6.收获机器人系统
收获是农业中劳动最密集且重复性最高的任务之一,同时也是所有农业生产周期的一部分。因此,多家私营企业和大学/研究中心已开发出多种机器人系统以实现该过程的自动化。
机器人收获机有两种类型:批量式(采摘所有果实/蔬菜)和选择性(仅采摘成熟/成熟待采摘的果实)。在本综述中,重点主要放在选择性收获机器人上,因为这在研究开发中受到了最多的关注。
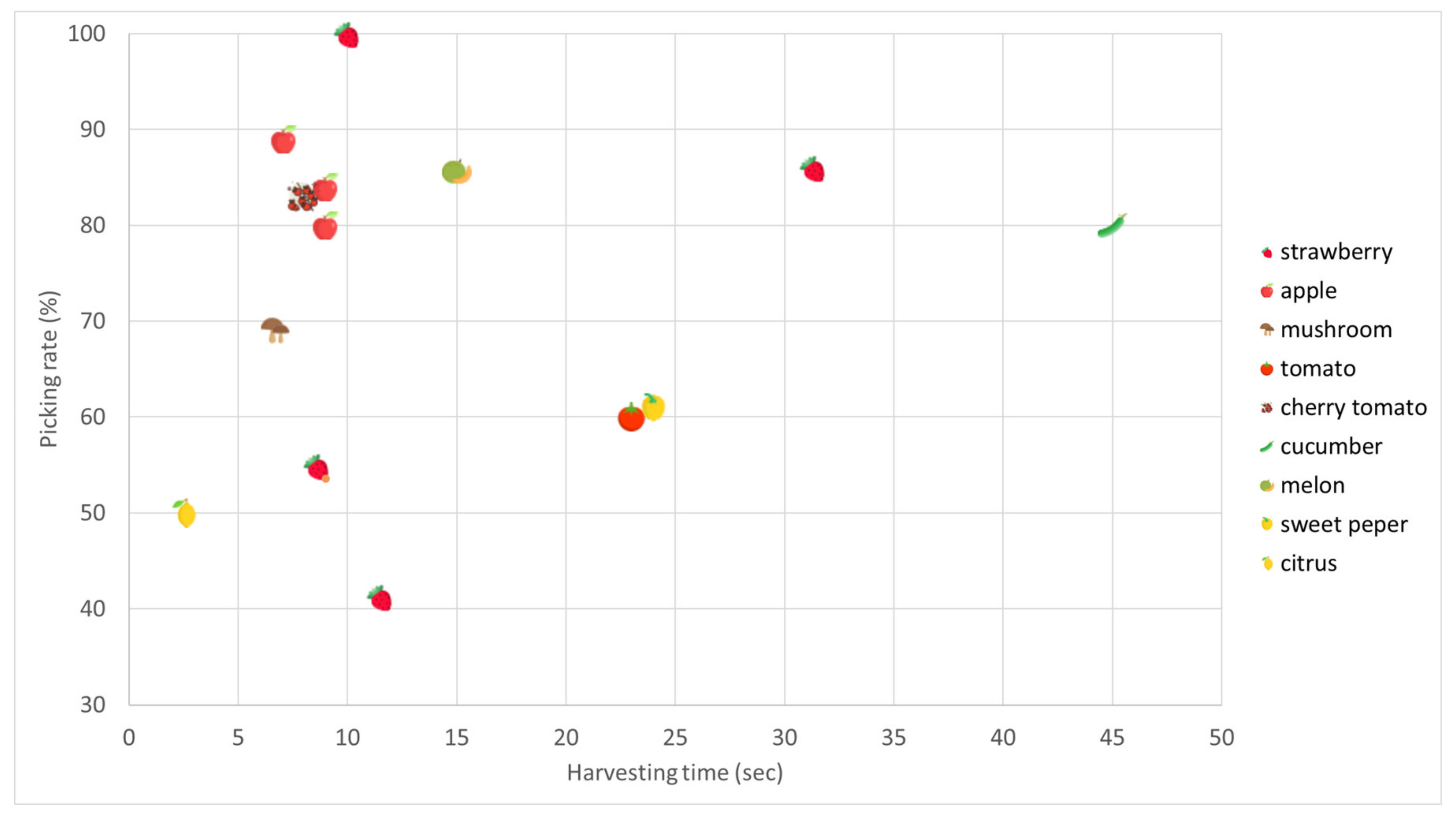
选择性机器人采收的两个主要性能指标是采摘速度和采摘率(即成功采摘的果实数量占成熟待采摘果实总数的比例[92])。收获必须在作物成熟后的特定时间段内完成,且需在不损伤作物和植物的前提下,收获大部分作物并完成上述所有操作。
大多数采摘机器人专注于草莓,这是一种高价值作物,其生产成本较高,主要原因是收获期间的劳动力成本[93,94]。对于草莓而言,采摘速度最快的机器人是[92,95],的草莓采摘机器人,其采摘速度分别为每颗草莓7.5和8.6秒,以及 HarvestCroo公司的Berry5机器人,其宣称的采摘速度为每颗水果8秒[96]。其他草莓采摘机器人的采摘速度最高达到10秒/果实[97]和11.5秒/果实[98]。然而,仅具有高的采摘速度是不够的,因为高采摘率也同样重要。未采摘的果实意味着种植者必须手动收获这些果实,这虽然不比人工采摘增加额外劳动力,但仍然是增加总劳动力成本的劳动。所展示的最高采摘率为86%[64]。在评估机器人收获性能的不同类别中,已显示出从0%到64%范围内的采摘成功率[99]。值得一提的是,在草莓采摘方面,采摘速度与采摘率之间似乎存在一种权衡关系,即高速采摘往往伴随着较低的采摘率,反之亦然。
除了上述机器人之外,还有多种商业化的草莓采摘机器人,但未提供性能指标。Dogtooth技术公司开发了一种用于台式种植系统的选择性采摘机器人[100], Agrobot开发了E系列自主选择性草莓采摘机,配备24个机械臂[101],而Octinion推出了Rubion采摘机器人[102]。
受到关注的其他作物包括苹果和番茄。苹果具有一些便于机器人收获的特性:红色品种在树冠中易于识别,而果实的坚硬特性使得夹持器在采摘过程中不易损伤果实。目前最快的苹果采摘机器人报告的采摘速度为每颗苹果7.5秒[103]和每颗苹果9秒[104],,而在高密度苹果园中展示的最高采摘率分别为89%[105]和约90%[106]。番茄在全球范围内广泛种植,在蔬菜作物生产中,其产量仅次于土豆。目前最快的番茄采摘机的采摘速度为每颗番茄23秒[107],,而可靠性最高的采摘机采摘率达到87% [108]。对于樱桃番茄,采摘速度为每串番茄8秒(不包括移动时间)[109]。Metomotion[110]和 Root‐AI[111]也各自拥有选择性商用番茄采摘机。
与苹果采摘机器人类似,本研究还包括了关于各种水果采摘机器人的其他参考文献。例如, Energid公司的商业柑橘采摘机能够在2‐3秒内采集每个橙子[112]。另一种受到关注的水果是樱桃,这种水果也容易被机器人识别,在樱桃园中已实现每颗水果14秒的采摘速度[113]。此外,Agribot是一种手动驾驶水果采摘机器人,抓取并分离每颗果实需要两秒[114]。
蔬菜总体上是一类极具前景的作物,可用于实施机器人系统。鉴于这一点,已开发出一系列不同的机器人收获设备。一款黄瓜采摘机器人宣称其采摘率达到80%,平均采摘速度为每根黄瓜45秒[115]。对于茄子,采摘率约为62%,采摘一个茄子需要64秒[116]。Sweeper机器人是一项欧盟资助项目,是一种选择性甜椒收获机器人,根据该项目的初步结果,其实现了平均每颗甜椒24秒的采摘速度[117]。在芦笋作物中,当机器人在同一位置收获两根芦笋时,实现的采摘速度为每根芦笋11.9秒;而在每个位置仅有一根芦笋需要收获的情况下,采摘速度为每根芦笋13.7秒[118]。Sparter是一款芦笋收获机器人,目前已由Cerescon实现商业化供应[119]。
除了上述蔬菜和果实外,还有一些蔬菜由于其具有挑战性的特征(如尺寸和重量),需要采用不同的收获原理。因此,为了实现对南瓜和卷心菜等重质农产品的机器人采收,运动学分析和仿真引起了关注[120]。对于果实而言,甜瓜和西瓜具有相似的特征,是典型的代表。甜瓜采收机器人的采摘率约为85%[121],,而用于西瓜采收的Stork的采摘率达到了67%[122]。
无论上述哪一类机器人收获机,某些系统都涉及多种作物。Demeter系统专为收获苜蓿和苏丹 (Sorghum)而设计vulgare sudanese),收获速度达到2公顷·小时−1[123]。关于蘑菇(Agaricus bisporus)采收机器人在采摘成功率方面的性能,发现约为70%[124]。在这种情况下,要求将废品率(即因损坏而达不到质量标准的蘑菇)控制在5%至10%之间(人工水平),但该机器人的废品率约为22%。
表7列出了主要的已评审采摘机器人,以及每种作物的最高采摘速度和采摘率。针对不同作物设计的机器人之间进行直接比较并无意义,因为每种机器人的要求大不相同。
在所审查的采摘机器人中,有两种安装在拖拉机上——Cerescon公司的Sparser芦笋采收机和苹果采收机器人[104];一种为手动驾驶——草莓采收机[95];其余均为自主的。关于采摘机构,主要有两种系统——夹持器和吸盘装置。夹持器通常由刚性关节和连杆构成,用于抓取和固定物体,或对物体施加力,使其相对于机械臂参考坐标系[125]发生旋转。吸盘装置则利用真空来分离果蔬,并进行拉扯、固定或扭转操作。对于果实脱离,已探索了多种方法,例如使用夹持器的指部切断果梗[101],、使用安装在指部上的刀片切割果梗[92,118],以及使用夹持器或真空吸盘工具拉扯摘果[107,126]。然而,Energid公司提出了一种针对柑橘类水果的解决方案,并未使用任何抓取工具,而是采用伸展杆对准果茎,将其切断,从而使柑橘果实脱离[112]。在果实收获之前,首先需要对其进行定位/识别。
用于果实定位的主要传感器是RGB相机,在某些情况下还结合了飞行时间传感器[117],、红外传感器 [95,101]或激光传感器[109]。Cerescon公司在其Sparser机器人上采用了完全不同的果实定位方法,这是由于白芦笋特殊的种植方式所致(芦笋在土壤下的沙床中生长)[119],因此使用了接近传感器而非相机。最后,机械臂自由度根据作物类型和所采用的方案不同,范围从2到7不等,其中5个或6个自由度是最常见的配置。
3.7.植物管理机器人
除了上述主要的田间作业外,还包括专注于植株结构的机器人。具体而言,它们专注于物料搬运、修剪/疏剪和缠绕绳。以下是为这些类型田间作业任务开发的机器人(表8)。
物料搬运在生产周期中并非高重要性的任务,但在植物苗圃等种植作业中至关重要。因此, HarvestAutomation公司开发了一款用于非结构化环境(如温室、拱棚等)的电动全自主物料搬运机器人[129]。
正如前文所述,高价值作物最受关注,其中研究最多的作物之一是葡萄藤。因此,本文所评审的两款修剪机器人均专注于葡萄藤。第一款由一家名为VisionRobotics的商业公司开发[130],,因此没有可用的技术信息;第二款则由坎特伯雷大学开发。为了有效修剪葡萄藤,该机器人会完全覆盖植物以遮挡阳光,然后使用配备切割器以及三个彩色相机并结合LED灯光[131]的六关节机械臂。类似地,用于苹果树修剪的机器人末端执行器使得枝条切割力与枝条直径呈对数关系[132]。
缠绕绳是高架啤酒花等作物中的劳动密集型任务,对该操作的机械化需求很高。为此,已开发出一种绕绳缠绕机器人,在以0.19ms−1[133]的速度移动时,其成功率可达97%。
表8.用于多种作物的植株管理农业机器人系统。
| Crop | 感知 | 操作 | 引用文献 |
|---|---|---|---|
| 苹果树 | 力传感器 | 修剪 | [132] |
| Hop | 摄像头、导线检测杆 | 缠绕绳 | [133] |
| 葡萄 | 三个摄像头 | 修剪 | [131] |
总之,由于本节所涵盖的每项任务相关的出版文献数量有限,未来需要应对的挑战尚不明确和具体。然而,修剪机器人应能够应对与作物结构相关的一些关键挑战,例如植株高度和枝条直径。为此,平台上应配备合适的传感器,即力传感器、视觉系统、多自由度末端执行器,以及在后台决策每株植物最优修剪方案的算法。最后,绕绳缠绕机器人面临的关键挑战主要与其性能有关(更高的作业速度和成功率),而这直接取决于视觉系统、末端执行器以及整个平台的整体性能。总体而言,未来应开展更多关于植株管理与作物结构机器人的实验和研究文献,以优化其传感部件和软件系统。在此背景下,现有系统可通过采用更高精度的视觉系统和更快速的算法,实现更快的执行时间周期。
3.8.多功能机器人系统
在作物生产周期中,大多数田间作业都是在短时间内完成的,并且每年仅执行一到两次。此外,所有种植者通常都在相同的时间段内进行这些作业。因此,购买和共享机器人并不可行。一种被广泛接受的解决方案是通过增加价值来缩短机械的折旧时间,从而使种植者能够负担得起。
该机器人系统主要通过设计使其适用于多种田间作业。这种方法已被大学、研究中心和商业公司所采用。为了使机器人能够执行多项任务,已确定了三种主要方法:设计一种可配备不同机具的机器人 [134], ff,设计一种模块化机器人[135],或从一开始就为机器人配备所有工具[136]。值得一提的是,所有机器人均为自主的,但其中有两台在需要时也允许用户手动控制[137,138],,还有两台是固定位置的,需使用远程操作系统[139,140]。表9列出了所综述的最重要的多功能机器人及其能够执行的任务。
不同的设计方法导致机器人配备了各种感知与测量传感器。有些机器人仅配备湿度和温度传感器 [136],,有些机器人则结合了更多传感器(湿度、温度传感器和彩色相机)[139],还有些机器人仅配备彩色相机[134]。最后,如前所述,一些机器人是模块化的,意味着它们所搭载的传感器会根据使用的模块而变化[141],,而其他机器人则可根据种植者需求加装额外的传感器[134]。
上述大多数多功能机器人未包含具体的性能指标。一种配备计算机视觉系统的智能机器人设备,用于除草和变量灌溉方案,其除草率最高可达90%,湿润分布面积达75%[142]。与杂草检测类似,结合治理操作的真菌病害检测在使用自动检测时可节省高达85%的杀菌剂[143]。此外,在为玉米田地准备耕作操作时,超过97.7%的玉米幼苗被准确检测到[144]。
表9.适用于多种作物的多功能农业机器人系统。
| 工作环境 | 感知 | 操作 | 引用文献 |
|---|---|---|---|
| 旱地作物 | N/A | 犁地、播种 | [145] |
| 旱地作物 | 声纳传感器、温度 | 监控、喷洒、施肥、病害检测 | [138] |
| 旱地作物 | 带红外滤光片的三个摄像头、湿度传感器和超声波传感器 | 犁地、播种、收获、喷洒 | [146] |
| 旱地作物,塑料大棚、温室 | 二维激光雷达、超声波传感器、一个RGB摄像头&一个单色红外相机 | 耙地、土壤采样、表型分析,通过组合模块完成的额外任务 | [135] |
| 旱地作物 | 土壤传感器 | 犁耕、灌溉、播种 | [147] |
| 温室 | 两个彩色摄像头,机器视觉传感器 | 喷洒、除草、额外任务通过添加或移除组件 | [134] |
| 旱地作物 | 湿度和温度空气传感器,红外传感器 | 犁耕、播种、灌溉、喷洒, 监控 | [136] |
| 城市作物 | 彩色相机、温度、湿度和光照传感器 | 播种、灌溉、熏蒸、修剪 | [139] |
| 旱地作物 | 电压传感器 | 播种、喷洒、犁地、割草 | [148] |
| 旱地作物 | 2D激光雷达、超声波传感器、红外相机 | 播种、除草、犁地 | [141] |
| 旱地作物 | N/A | 播种、喷灌、除草、收获 | [149] |
| 葡萄园 | N/A | 修剪,除草,割草 | [150] |
| 旱地作物 | N/A | 精量播种,起垄圆盘和机械行间作物清洁 | [151] |
总之,多功能机器人能够执行生产周期中的多个田间作业,但目前尚无解决方案能达到所需的模块化水平和良好性能,因为执行多项任务会增加硬件和软件的复杂性。好消息是,可用于单一任务机器人的解决方案同样适用于多功能机器人。此外,对于前几章中已经提到的那些问题和解决方案,多功能机器人必须对其所开发的每一项任务都表现出足够的能力或准确性。另外,执行多项任务的能力会增加成本机器人,由于其复杂的配置和所需的多种传感器。通过使用相对便宜的传感器来测量额外参数以扩展其功能,是证明较高成本合理的一种方法。
4.讨论
根据主要的田间作业,对农业田间作业中机器人系统的文献进行了分类,包括除草、播种、病虫害检测、作物巡查、喷洒、收获、植株管理和多功能机器人。每类机器人的示意图如图3所示。

本综述共包含153篇参考文献。根据引用来源,这些文献被分为四个主要类别:学术期刊来源、会议录、商业来源以及其他来源(如欧盟项目、书籍章节等)。学术期刊研究来源于多种期刊,例如 《农业中的计算机与电子》、《生物系统工程》、《精准农业》、《机器人学杂志》、《国际农业与生物工程杂志》等。此外,部分参考文献发表于会议录中,另一些则与商业机器人及国际研究项目等相关。
农业机器人已被公认为解决当前农业所面临挑战的最有前景的解决方案之一。针对作物生产周期中的每一项作业,从播种建立作物开始,到最终农产品的收获结束,均已开发出相应的农业机器人。然而,最受关注的任务往往是劳动最密集的环节,即收获和除草。由于大多数农业任务本质上具有季节性,在特定时间段内进行,因此要实现快速的投资回报率(ROI)——这是促使种植者投资最具说服力的理由——唯一方法是通过让机器人执行不止一项任务来增加其价值。这也解释了为何多功能机器人近期备受关注。投资回报率(ROI)和劳动力因素对机器人发展的影响力显而易见,尤其在比较各任务对应的商业机器人数量与学术界研发的机器人数量时更为明显。企业主要聚焦于两项作业如上所述,除草和收获任务中,学术界主要关注作物巡查、除草、收获以及多功能应用。收获和多功能任务通常需要复杂的解决方案,因而受到广泛关注,有助于大学或研究中心在更广泛人群中提升知名度。以上所有内容可清晰地在图4中看到。

在所有这些作业中都存在需要解决的具体问题。关于通信问题,这适用于所有农业机器人,重点在于数据如何在各个组件之间传输或信息如何传递给用户。解决这一挑战最常用的技术是WiFi [22,37,56,70,78], Ethernet[63,73,75,83,107,123],CAN‐bus[13,22,27,38,75,108,153],和RS‐ 232[59,63,71,85,134]。对于播种机器人而言,根据作物和田间特征确定最佳作业速度以及提高图像检测精度是需要进一步改进的关键因素。为了提高播种作业的精度和速度,已使用多种传感器,例如 RGB相机、力、位移和压力传感器、红外传感器以及轮式编码器。然而,仍需开展研究以实现更好的传感器融合,并应测试潜在的新传感器和技术,例如利用光谱学估计土壤质地以优化播种深度和间距布置。近年来,除草机器人(化学或机械式)得到了广泛发展,并提供了最多的商业化系统,因为除草是一项繁琐且劳动密集型的工作,尤其是在作物行内的除草作业中。然而,仍存在需要解决的优化问题,即机器人工作宽度较小、作业速度较慢,限制了其在大规模农场的应用,同时还需要更高的杂草检测精度以实现选择性点喷。迄今为止,除草机器人绝大多数使用RGB相机,并结合用于识别物体距离的传感器,例如光学和声学距离传感器、激光测距仪或立体视觉系统。此外,还应对除草机器人进行评估和定制,使其能够适应具有相似作业要求的作物环境。
对于病虫害检测机器人,已确定三个核心问题:缺乏图像数据库;图像处理速度慢(针对大量图像);以及田间光照条件不一致。然而,通过使用现有的开放获取图像数据库、应用新的数据合成处理方法以及采用创新照明系统,这些问题正逐步得到解决。监测与表型机器人也面临类似的光照相关问题,这些问题通过人工照明系统得以应对。监测与表型机器人的另一个挑战是背景分离。该问题已通过在田间采用更宽的行距,或实施其他技术手段(如从多个角度对同一植物进行成像)以及开发更优更快的算法。显然,生成的数据量需要通过合适的数据集处理、自动化工作流程和管道进行高效处理。喷洒机器人与病害检测机器人面临类似的问题。其他问题包括喷洒罐容量小和机器人自主性不足。尽管作业速度可能相当低,因为并非所有植物都需要喷洒,但选择性喷雾器的总喷洒时间可能低于传统非选择性喷雾器。此外,选择性喷雾器可通过使用微型喷雾器减少漂移和径流。在此背景下,建议的解决方案包括增加喷嘴数量、采用多操作平台,以及当然地提高检测算法速度。上述所有任务专用机器人均使用光学传感器来执行其任务,主要为RGB相机、多光谱/高光谱相机和激光雷达传感器,因此随着光学技术的进步,机器人的性能也将提升。
采摘机器人在全球范围内引起了广泛关注,尽管它们仍需进一步优化。目前存在两个主要问题:一是待采摘物体的定位困难,因为叶子、果实和植物其他部分会遮挡机器人的视野;二是由于农产品的敏感特性,可能导致果实损伤。为了开发出性能可与人类工人相媲美的采摘机器人,需要配备更先进的软件和硬件:更先进的软件用于处理果实簇和遮挡问题,更先进的硬件则能够可靠地执行收获操作,同时避免对产品和植物造成损害。为了实现对成熟果实的采摘,需要视觉系统来评估成熟度,并完成果实的定位与抓取。因此,所有采摘机器人均配备有摄像头(RGB、飞行时间、3D或立体相机),如果摄像头无法提供距离信息,则还需额外配置测距传感器,例如激光雷达传感器。此外,还应开发出更快、更精确的视觉算法,使其与柔软无冲突末端执行器以及适用于树木的机械臂协同工作。
对于植物管理机器人而言,由于每项任务的参考文献数量有限,尚无法明确和总结未来需要应对的挑战。然而,考虑到其他任务专用机器人所面临的挑战,可以说,为了提升现有机器人的性能,需要在软件(例如更优的机器视觉算法)和硬件(例如轻量级平台和工具)方面进行开发。此外,还应开展进一步的科学研究和实验试验,以推动在目前尚无机器人系统的其他农业任务中开发新的机器人解决方案。
多功能机器人可执行多种田间作业,但迄今为止,尚未有解决方案能够实现所需的模块化水平和良好性能。除了单任务机器人中已经提到的问题和解决方案之外,多功能机器人还必须针对其设计的每项任务进行充分且准确的执行。任务越多,硬件和软件方面的复杂性就越高,这应成为未来机器人的技术改进方向。由于需要执行多项任务,这些多功能机器人所使用的传感器应具备通用价值;这导致了光学传感器(如红外和RGB相机)与更多特定任务相关的传感器(如湿度、温度和光照传感器)的广泛组合使用。通常情况下,由于配置的复杂性和所需组件种类的增加,实现多项任务的能力会提高机器人成本。为证明更高成本的合理性,可以通过扩展其功能,并使其兼容多种作物来实现。
从农民的角度来看,农业机器人涉及高昂的投资成本。因此,农业领域需要新商业模式,例如机器人服务承包商。如上所述,快速收回投资的一种方法是投资多用途农业机器人。此外,实现快速投资回报率的另一种方法是针对能够迅速回本的高价值作物。同时,机器人作业的作物必须需要大量的作物护理,才能证明替代人工的合理性。因此,大多数机器人都是在此背景下开发的,其中草莓和葡萄在农业机器人社区中最受欢迎(图5)。
农业是最为非结构化的环境之一,环境变化频繁,且大多数系统并非以自适应方式设计,因此实现机器人化/自动化任务较为困难。此外,直到最近学习型系统才开始能够适应新的情况,包括在农业中的应用。植物生长难以准确预测,障碍物可能突然出现(如动物、岩石等),而由于植物生长和枝条移动导致的遮挡也是常见问题。最后,光照条件也因云层和昼夜循环而不断变化。因此,人们可能会认为,在温室或果园和葡萄园等半结构化环境中运行的机器人会率先得到发展。然而事实并非如此,几乎一半已开发的机器人专注于大田作物(图/6)。这可能是因为全球大部分作物都是以大田作物形式种植,或者是因为除草这一最热门的机器人任务类别主要应用于大田,而非温室。
5.结论
总体而言,在所有被综述的机器人中,研究最多的类别是收获和除草机器人,而研究最少的是病害检测和播种机器人。从所研究的机器人中可以得出一些具体且通用的结论,以应对当前的关键问题和潜在的未来挑战。农业机器人的总体概述包括以下部分或全部组件:导航系统;视觉系统;控制系统;通信组件;机械臂及其组件;当然还包括计算机、安全系统、远程协助/远程机器人系统(用于机器人在故障模式下提供协助)、边缘/云AI自适应学习系统以及面向农民的智能简易界面系统。大多数机器人使用RTK‐GPS进行导航,并利用激光雷达对环境进行数字重建。此外,RGB、立体以及多光谱和高光谱相机已被广泛使用,以便实现对重要环境物体和特征的定位,从而使机器人能够持续且高精度地执行任务。所有操作都需要更优的视觉系统,同时需要更快的图像处理方法/算法。特别是,图像处理与处理方法、通信手段、视觉系统以及图像的数据量直接相关。与机器人视觉系统相关的一个关键挑战是通过人工照明手段提供均匀的光照条件。此外,可以开发新的深度学习方法来提升机械臂末端执行器的性能,更具体地说,可通过学习方法(如抓取质量卷积神经网络)改善机器人的眼手协调能力。至于计算机硬件,应能够快速处理大量数据,尤其是在需要高分辨率图像的情况下。

















 6771
6771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









