



移动边缘计算下物联网网络中的能量高效感知数据收集
1 引言
随着物联网(IoT)和5G技术的广泛应用,移动设备在工业、民用、商业和政府领域中发挥着越来越重要的作用[11, 45, 5]。特别是,社交机器人已成为物联网网络的重要组成部分[29, 22,27]。在此背景下,各领域应用的合理决策依赖于社交机器人采集的感知数据。考虑到物联网网络的大规模性以及时空演化特性,社交机器人需要随时间移动以适应不同场景[41,14, 15]。在此背景下,移动边缘计算(MEC)在物联网网络边缘处理感知数据,减少需要路由到云的大量感知数据[26, 40, 8]。具体而言,由于社交机器人的移动,社交机器人的分布具有随机性,物联网网络的网络拓扑随时间频繁变化。根据以往研究,传统数据采集方法一直忽略了物联网网络的时空演化特性,无法解决社交机器人分布不均以及维持相对稳定网络拓扑的问题。针对上述问题,在物联网网络时空演化条件下如何高效节能地进行感知数据收集成为一个挑战。本文旨在探讨在物联网网络中结合移动边缘计算实现能量高效的感官数据收集。
能量高效的感官数据收集已引起广泛关注,并提出了各种方法。一些研究人员提出了一种聚类分层算法[33, 9],该算法包括两个步骤:簇形成和数据采集。在簇形成阶段,每个物联网节点通过生成0到1之间的随机优先级值参与簇头选举过程,邻近节点被聚集成簇。在数据采集阶段,簇内的节点首先将感知数据聚合到簇头,然后由簇头进行后续处理。簇头以单跳方式与基站通信。然而,这种方法不适用于移动边缘计算(MEC)中的数据采集。当物联网节点持续移动时,需要不断重新生成簇。当物联网网络规模足够大且物联网节点频繁移动时,簇形成所需的时间和精力超过了感知数据收集本身。因此,导致物联网网络拓扑不稳定以及能耗极不合理。为了降低能耗,一些研究人员采用移动汇聚节点从物联网节点收集感知数据[20, 4, 37, 28]。他们为移动汇聚节点设计数据采集路径,但这要求移动汇聚节点具有充足的能量。当物联网网络足够大时,该方法显然不适用。另一些研究人员则专注于通过数据压缩来减少数据传输消耗[7,38]。其中,稀疏原始信号通过压缩感知并随机采样获得离散信号样本。数据压缩利用了感知数据的冗余性,仅需少量样本即可恢复原始信号。然而,该方法可能导致数据失真,不适用于网络数据流量较大的场景。
为了解决这一挑战,本文提出了一种基于移动边缘计算的能量高效感知数据收集机制(EDGM)。本文的主要贡献总结如下:
– 我们提出了一种在社交机器人与边缘节点之间动态依赖关系中的边缘节点等级策略,该策略评估边缘节点的等级值并划分边缘网络。
– 我们提出了一种用于划分边缘网络的算法,该算法将网络划分为多个边缘网络,并维持稳定的网络拓扑。
– 我们设计了移动边缘节点的数据收集路径,用于从每个单一边缘网络中收集感知数据。该策略可降低数据收集路径上的能耗。
大量实验已在EdgeCloudSim仿真器[34]上进行,以评估能量效率。实验结果表明,该机制能够有效降低能量消耗,且边缘节点的等级阈值是影响性能的主要因素,相较于两种典型的基准技术而言。
本文的其余部分组织如下。我们在第2节介绍网络模型和能量模型,并在第3节描述问题模型并提出我们的感知数据收集机制EDGM。此外,我们在第4节描述实验设置并讨论实验评估结果。我们在第5节讨论相关工作。最后,第6节总结了本研究工作。
2 预备知识
2.1 网络模型
定义1 物联网网络。
物联网网络由一个元组IoT net = (ND,LK)表示,其中:
– ND 由一个云、一些边缘节点和一些移动物联网节点组成。
– LK 是 ND 中节点之间链路的集合。当两个节点在通信半径内时,它们之间存在一条链路。
定义2 边缘节点
ends[i]=(id, lc, typ, cr, cl),其中:
– id 是 ends[i] 的唯一标识符。
– lc 是 ends[i], 的地理位置,由 X坐标 和 Y坐标 组成。
– typ 是 ends[i] 的类型,可以是 云节点 或 边缘节点。
– cr 是 ends[i] 的通信半径。
– cl 是与从属 移动物联网节点 数量相关的 边缘节点等级。
定义3 移动物联网节点
mnds[i]=(id, lc, cr, ch),代表社交机器人,其中:
– id 是 mnds[i] 的唯一标识符。
– lc 是 mnds[i], 的地理位置,由其 X 坐标和 Y 坐标组成。
– cr 是 mnds[i] 的通信半径。
– ch 是 mnds[i] 所属的 ends[i].id。
通常,移动物联网节点是可移动的,并由边缘节点进行管理,而边缘节点大多是静态的,可以拥有更多的计算、通信和能源资源。考虑到物联网网络的时空演化特性,某些物联网节点可能需要移动到其他边缘节点通信范围内的区域。这意味着可以根据需要调整边缘节点与物联网节点之间的这种从属关系。
2.2 能量模型
本场景中采用一阶无线电模型来计算能量消耗。设ETx(k,d) 和ERx(k) 分别表示发送和接收一个传输距离为d的 k比特数据包所消耗的能量,它们通过以下公式1和公式2计算:
$$
ETx(k, d) = E_{Tx-elec}(k) + E_{Tx-amp}(k, d) = E_{elec} \cdot k + \epsilon_{amp} \cdot k \cdot d^n \quad (1)
$$
$$
ERx(k) = E_{Rx-elec}(k) = E_{elec} \cdot k \quad (2)
$$
设 Eij(k,d) 为从节点i到节点j的能耗,其中:
$$
E_{ij}(k, d) = E_{Tx}(k, d) + E_{Rx}(k) \quad (3)
$$
注意,在我们的实验中,位于网络中心的云被选为汇聚节点。通常假设汇聚节点具有无限的能量。因此,接收数据包所消耗的能量规定如下:
$$
E_{ij}(k, d) =
\begin{cases}
E_{elec}
k + \epsilon_{amp}
k
d^n, & \text{if } j \text{ is the cloud}; \
2
E_{elec}
k + \epsilon_{amp}
k*d^n, & \text{otherwise}.
\end{cases}
\quad (4)
$$
该能量模型的参数设置如表1所示。用于数据包传输的衰减指数参数n取决于周围环境。通常情况下,当环境中转发数据包无障碍物时,n设为2;否则,n设为3到5之间的值。
| Name | 描述 |
|---|---|
| Eelec | 发射和接收电子器件的能耗常数。 |
| ϵamp | 发射放大器的能耗常数 |
| k | 一个数据包中的比特数 |
| d | 传输距离 |
| n | 传输的衰减指数。 |
| ETx − elec | 发射电子器件的能耗。 |
| ERx − elec | 接收电子器件的能耗。 |
3 基于移动边缘计算的数据收集机制
本节介绍了我们的感知数据收集机制EDGM。在物联网网络中,存在一个云、一些边缘节点和一些移动社交机器人,其中边缘节点包含一个移动边缘节点。本文将感知数据收集过程描述如下:
3.1 问题建模
本文讨论了利用移动边缘计算(MEC)从社交机器人中高效节能地采集感知数据。感知数据的采集是物联网网络中应用与服务的基础[13, 39]。具体而言,考虑到物联网网络的大规模和时空演化特性,从移动物联网节点采集感知数据具有复杂性和低能效性,容易导致冗余能耗和网络拓扑不稳定。为解决该问题,本文提出了一种边缘网络划分方法以维持相对稳定的网络拓扑,并在此基础上设计了一种高效节能的感知数据采集算法,具体如下:
(1) 维持稳定网络拓扑
首先,考虑到边缘节点与社交机器人之间的动态依赖关系,本文提出了一种边缘节点等级值策略。边缘节点等级值与隶属于边缘节点的社交机器人数量之间存在映射关系,该映射关系通过设置等级阈值来实现。
其次,考虑到物联网网络的时空演化特征,本文在移动边缘计算网络中构建了改进的排序‐分块‐递归树(STR树)来划分边缘网络。传统STR树构建依赖于索引节点的空间位置,而物联网网络具有时空特性,因此本文对STR树构建进行了改进。根据边缘节点的空间分布以及STR树叶子节点的限制,对网络进行划分。当少量移动社交机器人随时间移动且其数量未改变叶节点的边缘节点等级值之和时,不会影响现有网络拓扑,能够维持稳定的网络拓扑。
(2) 最小化数据收集的能耗
当获得多个边缘网络时,移动边缘节点会从每个单独的边缘网络中收集感知数据。特别地,本文优化了移动边缘节点的收集路径,从而降低数据收集的能耗。
本文中,移动边缘节点的行程被设计为特定路径。当每个单一边缘网络仅被访问一次时,该路径应为哈密顿环[35]。因此,该路径问题被建模为旅行商问题(TSP)[6]。我们提出了EDGM机制来解决此问题,同时最小化感知数据收集的能耗。
3.2 边缘节点与移动物联网节点之间的动态依赖关系

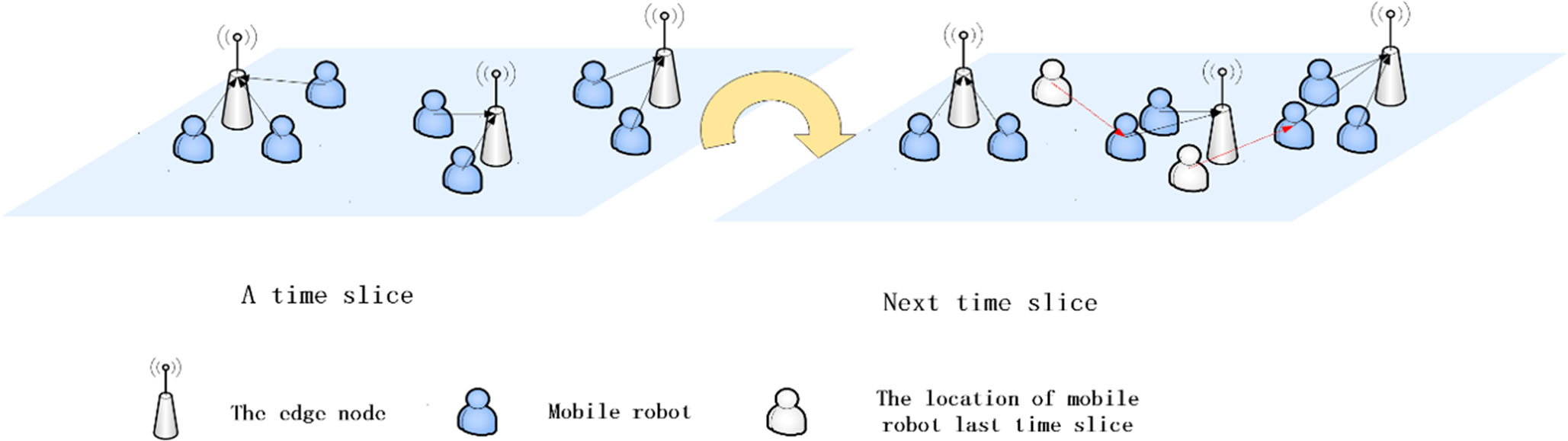
如图1所示,社交机器人的位置会随时间变化。这意味着边缘节点与社交机器人之间的从属关系可以在必要时进行演化。本文提出了一种策略来描述这种动态依赖关系。
$$
ends[i]:cl =
\begin{cases}
10, & \text{if } s[i]_d / Te > 10; \
s[i]_d / Te, & \text{otherwise}.
\end{cases}
\quad (5)
$$
此处设置一个等级阈值来计算等级值,且该等级阈值可根据需要进行调整。特别地,本文设置了从1到10的十个等级。如公式5所示,边缘节点用列表集合 ends[]=[ends[1],ends[2], ends[3], ⋯]表示,移动社交机器人用列表集合mnds[]=[mnds[1],mnds[2], mnds[3], ⋯]表示。设隶属于边缘节点ends[-i]的社交机器人数量为S,等级阈值为T,并通过映射关系获得等级值。对于边缘节点ends[i],,当S大于10T时,等级值设为10。当少量社交机器人移动且数量未达到等级阈值时,边缘节点等级值不会发生变化。
3.3 利用STR树的边缘网络划分
考虑到物联网网络的时空演化特性,本文致力于维持稳定的网络拓扑结构。本文提出了一种边缘网络划分方法,通过设置每个单一边缘网络中边缘节点的等级值总和的限制来划分边缘网络。
STR算法被称为Sort‐Tile‐Recursive算法,在R 树[1]的构建过程中,空间数据根据空间邻接关系进行分组。在介绍边缘网络划分之前,我们简要介绍STR 树作为背景。叶节点由多个(MBR,Tuple −标识符)数据对组成。MBR是包含相应空间对象的最小边界矩形。Tuple −标识符是指向相应空间对象的指针。传统STR树构建仅考虑索引节点的空间位置。本文中,改进了STR树以结合边缘节点的等级值来划分边缘网络。在一个叶节点内,边缘节点的等级值总和设为10。因此,每个等级值小于10的边缘节点都被视为待索引的空间数据,整个网络区域被视作 STR树的根节点。
如算法1所示,首先根据X坐标对边缘节点进行排序,得到endsx[](第5行)。然后在每个水平切片中,当边缘节点的等级值总和大于或等于n × M时,对 endsx[]进行水平划分(第6‐9行)。对每个水平切片中的边缘节点按Y坐标进行排序,得到列表endsy[](第10行)。此外,当边缘节点的等级值总和不大于 M时,根据Y坐标进行垂直划分。
最后,该切片被视为叶节点最小边界矩形(第 15‐20行)。
算法2详细描述了等级值查询处理。首先,统计每个叶节点中边缘节点的等级值总和(第1‐4行)。如果任意叶节点中边缘节点的等级值总和超过限制,则将重构改进的STR树以重新划分边缘网络。
3.4 移动边缘节点的数据收集路径
在每个单独的边缘网络中随机选择一个边缘节点作为簇头,其他边缘节点以多跳方式将感知数据聚合到簇头。移动边缘节点从边缘网络中的所有簇头收集感知数据。本文中,移动边缘节点遍历所有边缘网络中的簇头。
该问题被建模为遍历边缘网络中所有簇头的最短路径问题。该路径问题被视为TSP,已被证明具有非确定性多项式完全问题(NPC)计算复杂度,并在本文中通过动态规划求解。
如算法3所示,簇头之间的代价矩阵表示为数组 cost[][]。V 是未被访问的簇头集合。d[][]是动态规划列表。我们遍历集合 V。当 V 为空集时,可得到底层的 d[i][j](第7–21行)。然后寻找上层的最短距离 d[0][2^n − 1 − 1](第23–30行)。
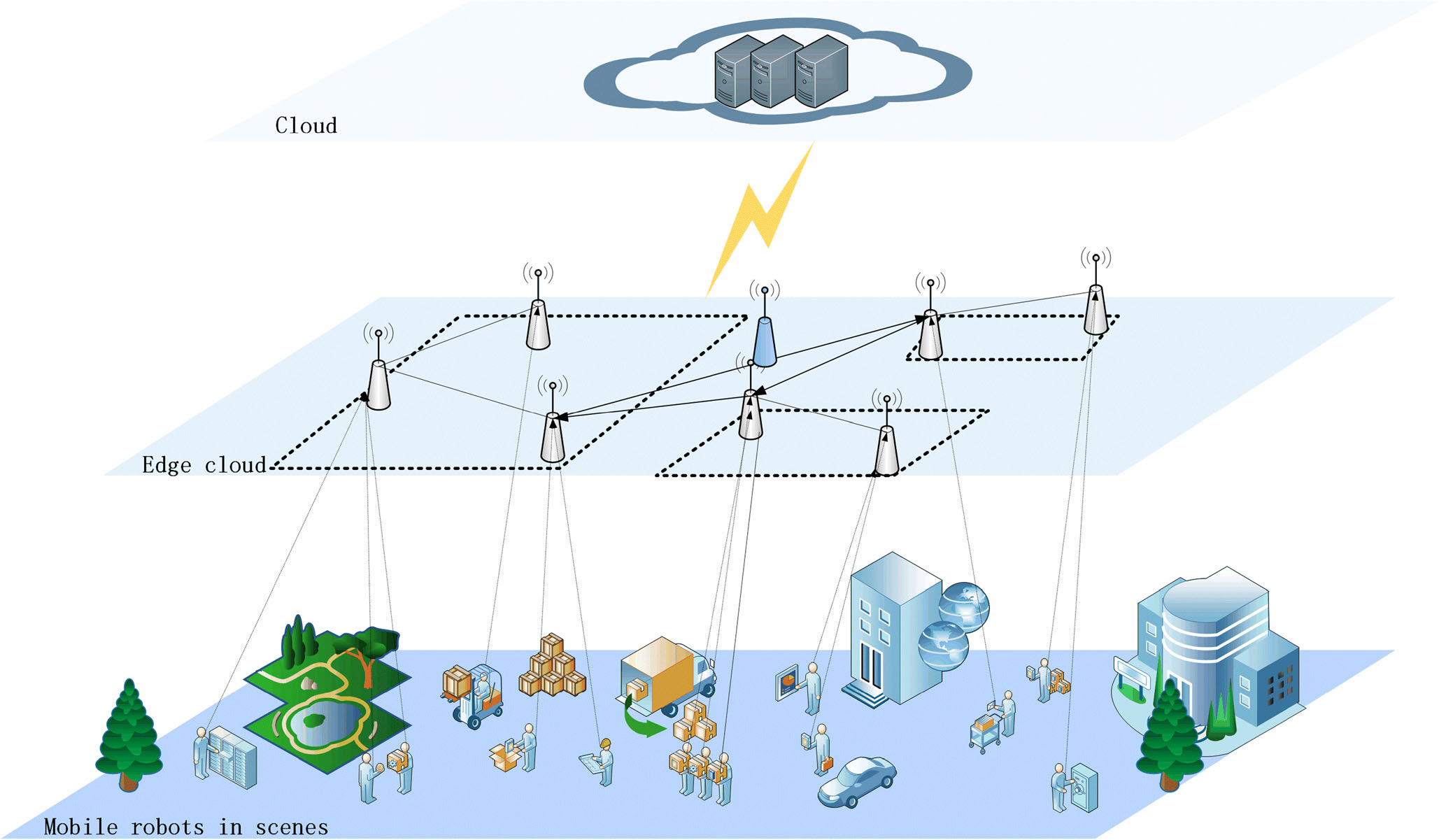
算法32总结了本文的技术。图1描述了社交机器人在物联网节点层的分布与移动情况,如图2所示。图3描述了移动边缘节点在边缘节点层的路径,如图2所示。移动边缘节点沿本文设计的路径,在多个边缘网络中从簇头收集感知数据。
4 实现与评估
通过采用EdgeCloudSim仿真器实现了原型系统。实验在一台配备Intel(R) Core (TM) i5‐10210U 处理器(1.60 GHz)、8 GB 内存和64位Windows操作系统的笔记本电脑上进行。
4.1 我们实验中的实验设置
在我们的实验中,网络区域设置为100m×100m,边缘节点被部署在精心选择的地理位置,且物联网节点在各自的边缘网络中随机分布。边缘节点数量设置为10到20,增量为5;移动物联网节点数量设置为100到300,增量为100。移动节点和边缘节点数量的设置依据相关工作[10]中定义的参数确定。该设置适用于当前场景的实验规模。边缘节点和移动物联网节点的初始位置由程序随机生成,移动物联网节点的移动遵循高斯‐马尔可夫移动模型[25]。云的位置设置为(50m,50m)。表2列出了我们实验的参数设置。
| 参数名称 | 值和单位 |
|---|---|
| 网络区域 | 100 m×100m |
| 边缘节点数量 | 10, 15, 20 |
| 移动节点数量 | 100, 200, 300 |
| 云位置 (x, y) | (50 m, 50 m) |
| 通信半径 | 30 m |
| 标签的位数(k) | 1 |
| 传输衰减指数(n) | 2 |
| Eelec | 50纳焦/比特 |
| ϵamp | 0.1nj/(比特 ×米²) |
4.2 基准方法
在我们的实验中,边缘节点被视为可信传感器节点,移动边缘节点从其他边缘节点收集数据,并沿设计路径将数据包传输到云。我们将EDGM与LEACH和UTDC算法进行比较:
–
LEACH
[2]:汇聚节点从智能设备收集感知数据,并以单跳方式将这些数据转发到基站。值得注意的是,在我们的实验中,每个边缘节点都被视为汇聚节点,并以单跳方式向云传输数据包。
–
UTDC
[36]:该算法评估参与数据收集过程的传感器节点的信任度。数据收集路径问题被建模为TSP问题,并通过贪心算法求解。
4.3 评估结果
为了评估我们数据采集机制的性能和效率,我们设置了以下三种类型的参数设置:
– 边缘节点层级阈值:设置为10、15和20,用于确定公式5中所示的边缘节点层级。
– 移动物联网节点(社交机器人)数量:设置为100、200和300,用于确定物联网网络的规模。
– 边缘节点数量:设置为10、15和20,用于确定边缘网络的规模。
4.3.1 边缘节点层级阈值与移动节点数量
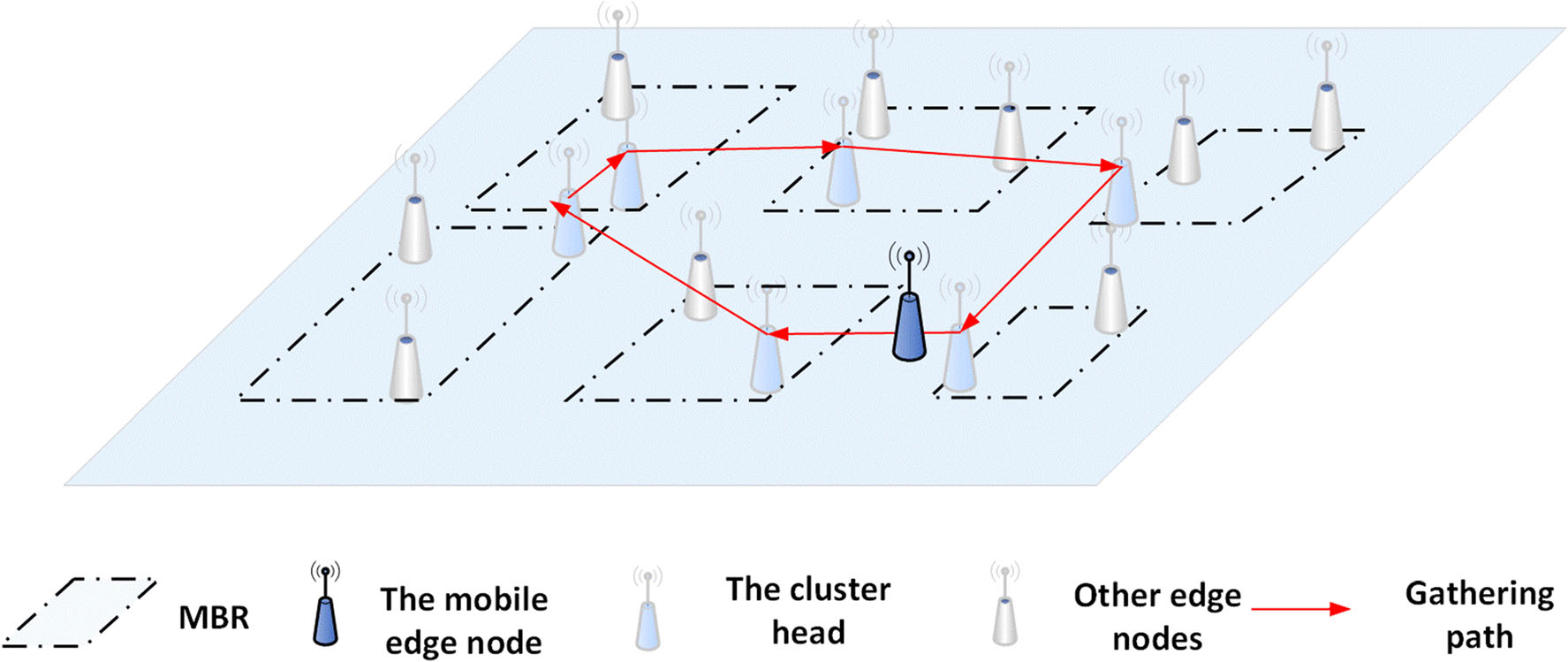
图4显示了边缘节点层级阈值分别设置为10、15和20时的能耗对比。移动物联网节点数量从100变化到300,边缘节点数量为10个。通常情况下,网络规模越大,能耗越高。图4中的数据表明,当等级阈值相同时,随着移动物联网节点数量的增加,能耗显著上升。当移动物联网节点数量为100且等级阈值不同时,能耗变化较小。这是合理的,因为移动物联网节点数量较少时,等级阈值的影响不太明显。当移动物联网节点数量较小时,边缘节点的等级值不会频繁变化甚至保持不变,导致网络拓扑结构不频繁变化。因此,在此设置下能耗变化较小。
值得注意的是,当移动物联网节点数量相同且等级阈值为15时,能耗最低。特别是当移动物联网节点数量为300、等级阈值为15时,能耗显著降低。等级阈值与网络规模(移动物联网节点数量)之间存在映射关系,该关系影响网络的能耗。
4.3.2 网络抖动频率
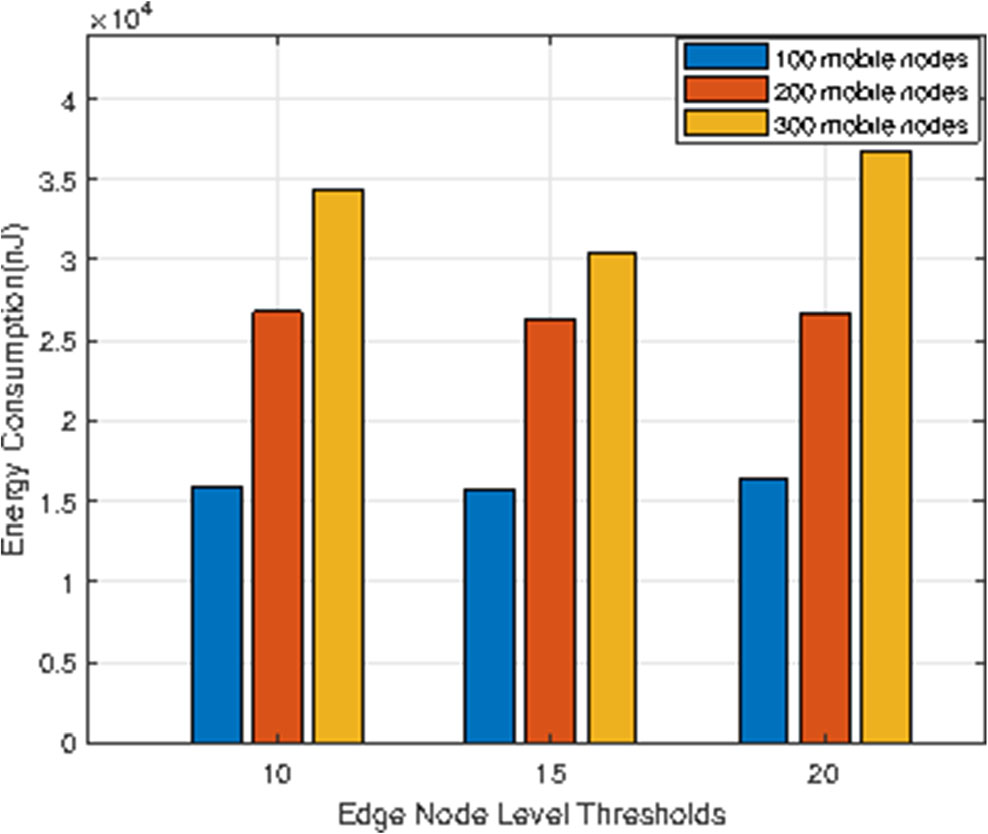
图5显示了当等级阈值为10、15、20时,网络拓扑调整的频率。边缘节点数量为10,移动物联网节点数量为100、200。在实验中,物联网节点移动遵循高斯‐马尔可夫移动模型[25],并用于判断是否根据算法3调整网络拓扑。网络拓扑调整频率通过以下公式6计算:
$$
f = \frac{a}{b} \quad (6)
$$
其中 b 为时间片(秒),a 为时间片内网络拓扑调整的次数。从图5可以看出,等级阈值越大,网络拓扑调整频率越低。如图5所示,当移动IoT节点数量为200 且等级阈值为20 时,网络拓扑调整频率为0。在此设置下,所有边缘节点的层级总和为10,导致网络拓扑不会发生变化,这意味着EDGM无法工作,也无法高效节能地收集数据。等级阈值的取值受IoT网络规模的影响。考虑到IoT网络的时空演化特性,保持网络拓扑尽可能稳定并高效节能地收集数据是必要的。如果等级阈值过大,网络拓扑将不会被调整,从而导致不必要的能耗。相反,如果等级阈值过小,网络拓扑将被频繁调整,从而导致网络拓扑不稳定。因此,设置不同的阈值可以在两者之间取得平衡,以最大化利用我们的技术。
4.3.3 考虑不同数量边缘节点时与LEACH和UTDC的比较
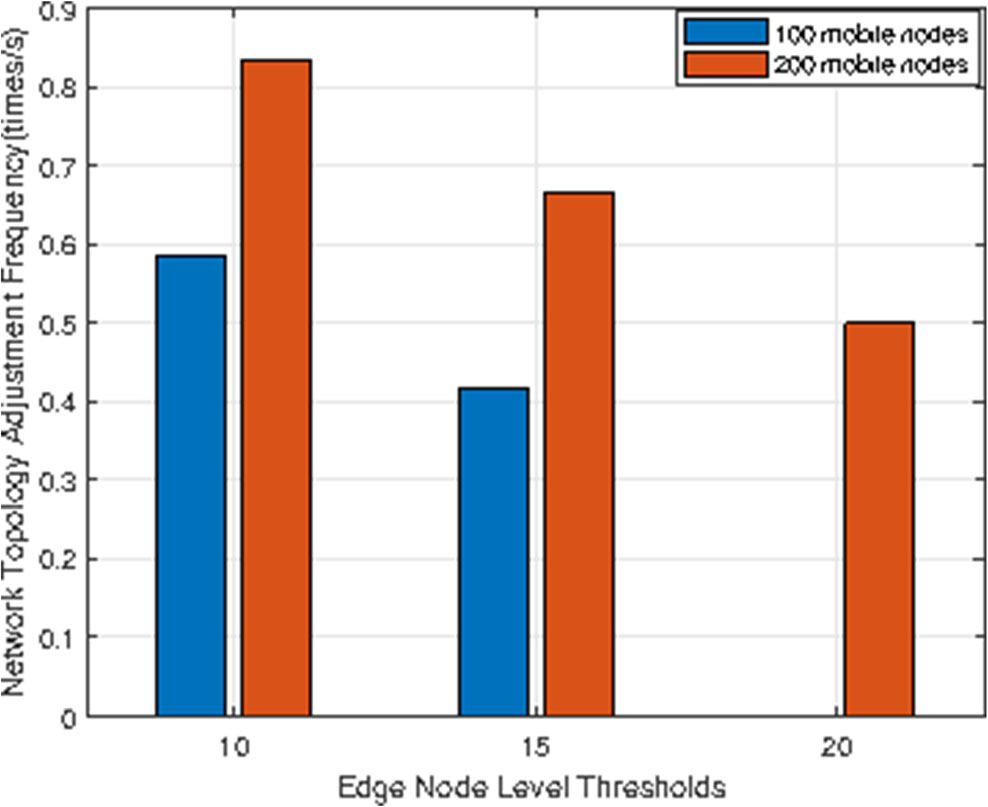
图6显示了 EDGM、LEACH和 UTDC的能耗,其中边缘节点数量设置为10到15,增量为5。移动物联网节点数量为300,等级阈值为15。如图所示,当边缘节点数量相同时,EDGM的能耗明显小于 LEACH和UTDC。随着边缘节点数量的增加,所有方法的能耗也随之增加。
特别地,EDGM的能耗增长率远小于其他两种方法,而LEACH的能耗增长率最大。这是可以预见的。在LEACH中,每个边缘节点以单跳方式与云通信。UTDC将边缘节点层的数据收集路径问题建模为一个 TSP问题,并通过贪心算法求解。EDGM对边缘网络进行划分,并将数据收集路径问题建模为一个通过动态规划算法求解的TSP问题。通常情况下,动态规划算法优于贪心算法。并且EDGM中参与的簇头节点更少相比UTDC中的参与边缘节点,当边缘节点数量增加时,LEACH的能耗显著增加,而EDGM的能耗仅略有增加。
4.3.4 考虑不同数量移动节点时与LEACH和UDTC的比较
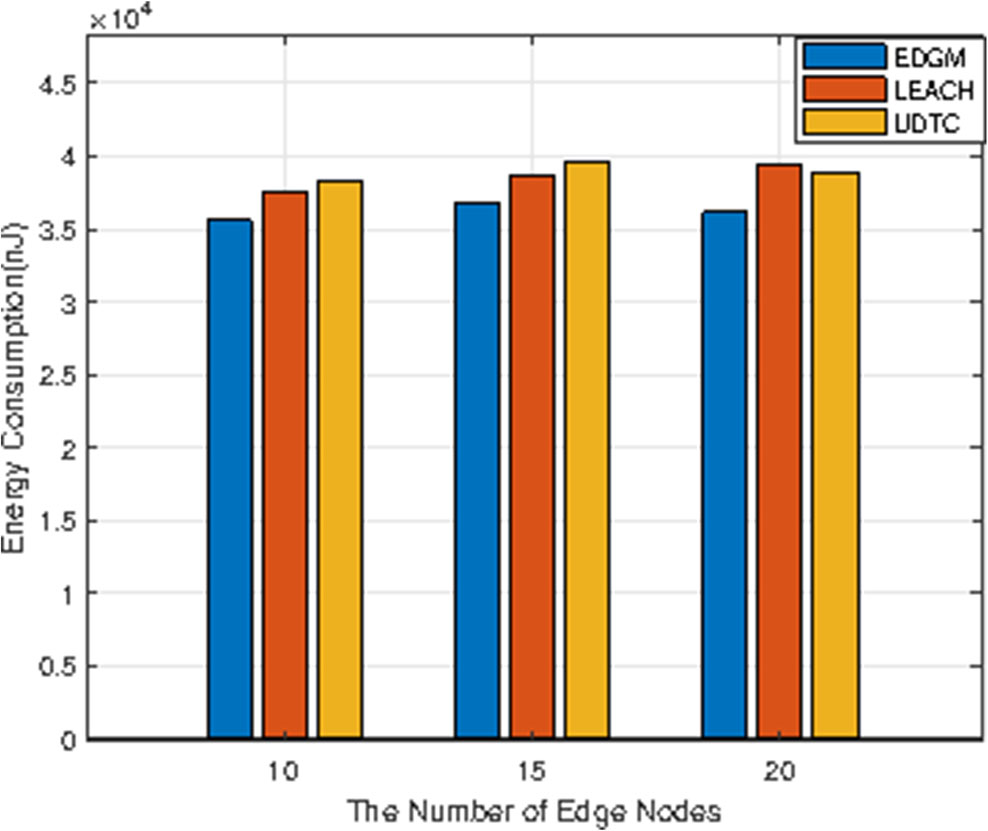
图7显示了当移动物联网节点数量设置为100、200和 300时,EDGM、LEACH和UTDC的能耗情况。边缘节点数量为10,等级阈值为15。从图中可以看出,当移动物联网节点数量相同时,EDGM的能耗低于LEACH和UTDC。
随着移动物联网节点数量的增加,EDGM的能耗增长率明显小于其他两种方法,而UTDC的能耗增长率最大。这是合理的。UTDC会访问路径上的所有边缘节点,且该路径是通过贪心算法求解TSP得到的。当边缘节点数量固定时,随着移动物联网节点数量的增加,需要上传的感知数据包数量也随之增加。此时,路径中额外的感知数据包所带来的能量消耗可能会超过节省的能量。LEACH以单跳方式将感知数据包传输至云。随着移动节点数量的增加,增加的能耗仅来源于增多的数据包。EDGM在边缘节点层对边缘网络进行划分,每个单一边缘网络的规模固定,其数据收集路径比UTDC更短,能够平衡感知数据包与转发数据收集路径之间的能耗关系。
5 相关工作和比较
5.1 数据收集的路由路径
在[31]中,作者提出了一种有效的数据采集方法。该技术选择最优的簇头节点进行数据采集与传输,并采用蚁群优化算法求解最优路径问题。在[24]中,作者提出了多无人机(UAV)方法用于在无线传感器网络中收集感知数据。考虑到多架无人机的飞行路径,作者设计了详细的行进方案,以高效地在无线传感器网络中收集数据。在[23]中,刘晓等提出了一种基于矩阵补全的采样点选择与智能无人机轨迹优化联合(SPSIUTO)的数据采集方案,他们在时间和空间上进行矩阵采样。同时,他们提出了一种算法来优化无人机的数据收集路径。在[19]中,黄绍波等提出了一种新颖的基于基线数据的可验证信任评估(BDVTE)方案。为了收集数据,他们招募移动车辆(MV)来收集数据。该方法分别用于对移动车辆进行可靠的信任度评估、合理的奖励以及高效的路径调整。在[36]中,王天等提出利用移动雾节点来收集物联网数据,并通过贪心算法的TSP实现移动雾节点的收集路径。其优点是延迟相对较小,但贪心算法的TSP最短路径通常并非最优,在网络规模足够大时可能导致过高的能耗。在[30]中,任莹莹等提出了一种基于数据中继骡子的收集方案(DRMCS)。他们考虑了感知任务完成率、冗余率和延迟,并提出了微型移动数据中心(MMDC),以解决大量智能设备与数据中心之间的连接问题,同时提出了基于模拟退火算法的MMDC选择策略。
5.2 动态物联网网络中的感知数据处理
在[18],侯文静等人提出了一种基于对等网络的边缘计算智能电网模型,该模型应用于边缘计算层。当边缘节点以点对点方式连接时,边缘节点可用于收集、计算和存储数据,从而在数据处理后实现彼此之间的通信。在[42],詹成等人提出了一种利用移动数据收集器在无线传感器网络中进行数据采集的技术。他们使用无人机作为移动数据收集器,可延长网络寿命。然而,该方法在某些场景下并不适用,例如存在自然环境限制的情况。在[16],韩广杰等人提出了一种基于分层的三维水下声学传感器网络数据采集方案。他们在上层采用基于前向集的多跳转发算法进行数据采集,在下层应用了基于邻居密度聚类的自主水下航行器(AUVs)数据采集算法。
压缩性数据收集方案在([32,3])中被提出。原始感官数据被压缩后,在网络中进行重构和传输,从而提高数据采集效率并降低数据传输过程中的能耗。在[21]中,李国瑞等人提出了一种基于去噪自编码器的数据收集方案。该方案分为数据训练阶段、数据收集阶段和数据重建阶段,主要在数据训练阶段对去噪自编码器进行训练。在[17]中,哈桑·哈尔布等人提出了一种用于周期性传感器大数据框架的两级数据缩减方法。该方法也分为两个阶段:第一阶段使用皮尔逊系数模型对数据进行压缩,第二阶段使用K‐均值聚类方法对节点进行聚类。在[7]中,陈思光等人提出了一种用于感知数据高效数据采集的分层压缩方案。他们重点关注时空特性相关性并构建特定的投影方法来压缩数据。
5.3 STR树在数据采集中的应用
STR树通常用于空间索引。在[43],张 Yanran 等人提出了一种基于网格辅助和STR树的空间数据划分(GASTRSDP)方法,能够满足负载均衡的需求。在[44],陈展龙等人中,提出了一种基于单调链和STR树索引的改进叠加分析算法。该算法利用简单要素的叠加分析功能,尽可能多地将多边形节点填充到STR树索引结构中,从而减少在空间数据库中查询多边形时的访问次数。在[12],裴公侨提出了一种通过选择坐标策略来划分空间对象至R树节点,以改进在时间序列索引中打包R树的STR算法的方法。他们在基于R树的时间序列相似性搜索方面对STR进行了改进,提出了两种启发式策略:第一种策略是预定义一组有序轴,然后在每个轴上将排序后的空间对象分组为若干切片,这些轴按照各轴上空间对象最远中心点之间距离的降序排列;第二种策略是每个切片拥有其自身的最长轴。每种策略都有一种方法将连续运行段的端点连接成次优的空间填充曲线,这些曲线可能使节点内对象之间的距离更小并节省空间。
6 结论
由于物联网网络的时空演化特性,考虑到网络拓扑不稳定以及社交机器人分布不均等因素,传统方法可能不适合支持感知数据收集。为解决这一问题,本文提出在物联网中利用移动边缘计算进行感知数据收集。具体而言,我们根据边缘节点的空间位置和层级,通过改进的STR树构建移动物联网节点与边缘节点之间的动态依赖关系,以划分边缘网络。采用移动边缘节点从各个独立的边缘网络中收集数据。为保证稳定的网络拓扑,我们在物联网中利用移动边缘计算进行感知数据收集。实验结果表明,该机制能够降低能耗并延长网络寿命。
本文旨在在具有移动边缘计算的物联网网络中收集感知数据。该策略需要访问所有物联网节点。请注意,当物联网节点密集部署时,部分物联网节点可能提供具有一定精度的感知数据,能够满足某些应用的需求。发现在多边缘网络中发现部分物联网节点是我们的未来工作之一。
致谢 本工作受到国家重点研发计划项目号2019YFB2101803、国家自然科学基金项目号61772479和42050103的资助。

















 913
913

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









