







 超级会员免费看
超级会员免费看
 BA(bundle adjustment)是通过最小化重投影误差来调整相机姿态和特征点位置的图优化过程。在PnP问题中,BA用于求解相机位姿。本文深入探讨了PnP中的BA优化,解释了重投影的概念及其作为误差度量的重要性,并介绍了使用g2o进行图优化的基本步骤。
BA(bundle adjustment)是通过最小化重投影误差来调整相机姿态和特征点位置的图优化过程。在PnP问题中,BA用于求解相机位姿。本文深入探讨了PnP中的BA优化,解释了重投影的概念及其作为误差度量的重要性,并介绍了使用g2o进行图优化的基本步骤。
BA(bundle adjustment)指的是同时调整相机姿态和特征点位置,以便从每个特征点反射出的光线(bundles of light rays),通过调整(adjustment)最后都能通过相机光心。故也有人翻译为光束平差法。BA通常构建为一个最小二乘问题,通过使重投影误差最小化来同时调整相机的位姿和特征点的坐标。BA的目的就是每一个匹配好的特征点建立方程,然后联立,形成超定方程,解出最优的位姿矩阵或空间点坐标(两者可以同时优化)。
PnP中的BA优化
PnP是求解3D点到2D点的运动方法,它描述的是在已知n个3D点的空间坐标以及他们的投影位置时,如何估计相机的位姿。特征点的3D位置可以由三角化或者RGB-D相机的深度图确定。
重投影: 重投影顾名思义就是把 3d空间中的点重新投影到图像平面上。
误差:3d点理论像素坐标和我们的观测到的像素坐标必然不同,而这个理论值和观测值的差就是重投影误差。
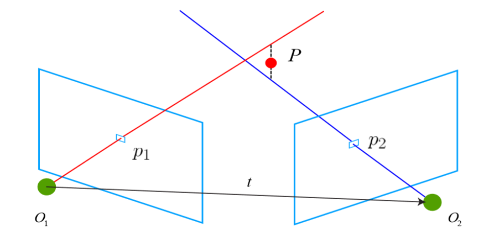
第一次投影指的

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 5327
5327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











