




 本文档介绍了如何使用RT-Thread通过串口和无线方式与ROS连接,实现智能车的远程控制。首先讲解了ROS环境的搭建,包括Ubuntu上的ROS安装和初始化。接着,展示了RT-Thread中配置rosserial软件包,以及使用USART2和PWM控制电机。最后,通过ESP8266实现无线连接,使RT-Thread开发板通过TCP与ROS通信。
本文档介绍了如何使用RT-Thread通过串口和无线方式与ROS连接,实现智能车的远程控制。首先讲解了ROS环境的搭建,包括Ubuntu上的ROS安装和初始化。接着,展示了RT-Thread中配置rosserial软件包,以及使用USART2和PWM控制电机。最后,通过ESP8266实现无线连接,使RT-Thread开发板通过TCP与ROS通信。
上期回顾:
RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)
RT-Thread智能车目标识别系统连载教程——训练卷积神经网络模型(2)
RT-Thread智能车目标识别系统连载教程——运行卷积神经网络模型(3)
RT-Thread智能车目标识别系统连载教程——Darknet 训练目标检测模型(4)
引言
这篇文档主要介绍 RT-Thread 如何使用串口或者无线和 ROS 连接,会包含这么些内容:
第一部分:ROS 环境搭建
第二部分:RT-Thread rosserial 软件包
第二部分:RT-Thread 添加 USART2 和 PWM
第三部分:RT-Thread 使用 ESP8266 AT 固件联网
这里先介绍一下什么是 ROS?为什么要和 ROS 连接?
机器人操作系统 ROS (Robots Operating System) 最早是斯坦福大学的一个软件框架,现在不管是工业机器人,还是娱乐用的机器人都运行着 ROS。

图片来源网络,如有侵权请联系删除
一个机器人通常有很多个部件、传感器,为了保证机器人不会因为某一个传感器故障,导致整个系统瘫痪,所以采用了分布式的节点,利用不同节点之间的通讯收集传感器数据和控制指令,这篇文档后面会使用到的通讯协议就是 rosserial。
和 ROS 连接的好处在于,一方面由 ROS 管理各个机器人节点更稳定,另一方面 ROS 现在已经有了非常多成熟的软件包,使用 ROS 就可以非常方便的为自己的机器人添加摄像头图像识别、激光雷达建图导航等高级功能。
不过这篇文档只会涉及 RT-Thread 和 ROS 建立基本的连接,实现小车的运动控制,之后可能会有后续文档介绍如何连接激光雷达建图,并进行全局路径规划。
这篇文章假定大家都已经会用 RT-Thread 的 env 工具下载软件包,生成项目上传固件到 stm32 上,并且熟悉 Ubuntu 的基本使用。
1 ROS 简介
这里的开发环境搭建其实是需要搭建 2 份,一份是小车上的 ARM 开发板 (树莓派,NanoPi 什么的),另一个则是自己的电脑,因为我们希望把电脑作为 ROS 从节点,连接到小车上的 ROS 主节点,不过开发板和电脑的 ROS 安装是一模一样的。
既然要和 ROS 连接,那么首先就得要有一个正常运行的 ROS。安装 ROS 其实非常简单,这里推荐使用 Ubuntu 18 (开发板推荐系统用 Armbian),因为官方对 Ubuntu 的支持优先级是最高的,安装教程也可以参照 官网:http://wiki.ros.org/melodic/Installation/Ubuntu
只需要输入下面的 4 行命令,就在 Ubuntu 上装好了 ROS。
1sudo sh -c 'echo "deb https://mirror.tuna.tsinghua.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3sudo apt update
4sudo apt install ros-melodic-ros-base
上面我使用了清华大学的镜像源,这样从国内下载 ROS 会快很多,而且我只安装了 ROS 的基本软件包,没有安装图形化软件包 gviz,gazebo 什么的,因为后面也没有用到。
1.2 ROS 环境初始化
ROS 安装好之后还需要进行初始化,不过也是只有短短几行命令:
1sudo rosdep init
2rosdep update
3
4echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
5source ~/.bashrc
1.3 启动 ROS
启动 ROS 的话我们需要确保它是常驻后台运行的,所以我们可以使用 tmux:
1roscore
在 tmux 里启动了 ROS 主节点后,我们就可以 Ctrl + B D 退出了,而 ROS 主节点依旧在后台运行。
1.4 参考文献
Armbian:https://www.armbian.com/
ROS Melodic 安装:http://wiki.ros.org/melodic/Installation/Ubuntu
2 RT-Thread 串口连接 ROS
这一部分会介绍如何使用串口将运行着 RT-Thread 的 STM32 开发板和运行着 ROS 的 ARM 开发板连接,看起来差不多就是这样。

这里说明一下不同开发板的分工,STM32 运行着 RT-Thread 负责控制电机,接收传感器信息;ARM 运行着 ROS 负责进行全局控制,例如给小车发出前进的指令。
2.1 RT-Thread 配置
首先我们需要打开 usart2,因为 usart1 被 msh 使用了,保留作为调试还是挺方便的。
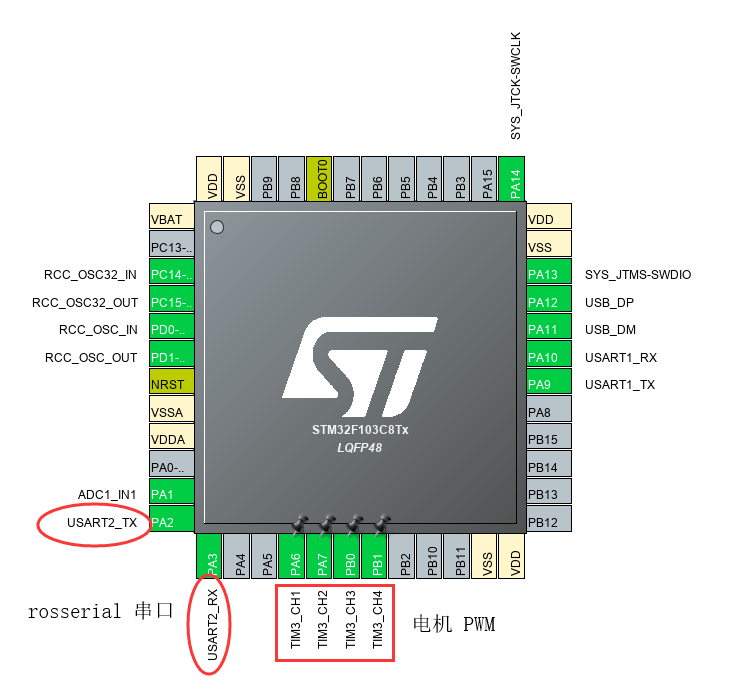
在 CubeMX 里我打开了 USART2,另外还打开了 4 路 PWM,因为我后面使用了 2 个电机,每个电机需要 2 路 PWM 分别控制前进和后退。
接下来还需要在 menuconfig 里面打开对应的选项,考虑到有的开发板默认的 bsp 可能没有这些选项,可以修改 board/Kconfig 添加下面的内容。
串口的配置:
1menuconfig BSP_USING_UART
2 bool "Enable UART"
3 default y
4 select RT_USING_SERIAL
5 if BSP_USING_UART
6 config BSP_USING_UART1
7 bool "Enable UART1"
8 default y
9
10 config BSP_UART1_RX_USING_DMA
11 bool "Enable UART1 RX DMA"
12 depends on BSP_USING_UART1 && RT_SERIAL_USING_DMA
13 default n
14
15 config BSP_USING_UART2
16 bool "Enable UART2"
17 default y
18
19 config BSP_UART2_RX_USING_DMA
20 bool "Enable UART2 RX DMA"
21 depends on BSP_USING_UART2 && RT_SERIAL_USING_DMA
22  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 823
823



 到【灌水乐园】发言
到【灌水乐园】发言







