







ROS 初级教程学习笔记
a 环境的配置及软件包的创建和编译
b ROS 节点,话题,服务和参数 (rqt_console和roslaunch)调试
c 创建ROS消息和ROS 服务(rosmsg, rossrv, roscp 命令行使用),使用python&C++编写消息发布器和订阅器,并测试
d 编写Service和Client,并测试
e 录制和回放bag 包
一. 安装配置
1. 参考优快云链接山水Ubuntu ROS Kinetic安装
2. 管理空间
查看环境变量:
$ printenv | grep ROS
注意: 在所有教程中你将会经常看到分别针对 rosbuild 和 catkin 的不同操作说明,这是因为目前有两种不同的方法可以用来组织和编译ROS应用程序。一般而言,rosbuild 比较简单也易于使用,而 catkin 使用了更加标准的 CMake 规则,所以比较复杂,但是也更加灵活,特别是对于那些想整合外部现有代码或者想发布自己代码的人。关于这些如果你想了解得更全面请参阅 catkin or rosbuild(英文页面)。
3. 创建ROS工作空间(以catkin 为准)
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/ $ catkin_make
一般创建完成后需要刷新环境,使用source命令
source devel/setup.bash
二. ROS文件系统介绍
1. 安装ros-kinetic-ros-tutorials程序包
sudo apt-get install ros-kinetic-ros-tutorials
2. 文件系统概念
-
Packages 软件包,ROS程序代码的组织单元,包括:程序库,可执行文件,脚本&other file
-
Manifest(package.xml):清单,对 ‘软件包’ 相关信息的描述。定义依赖关系,包括版本,维护者,许可协议等
3. 文件系统工具
rospack
rospack find [包名称]
$ rospock find roscpp 输出:YOUR_INSTALL_PATH/share/roscpp
roscd
roscd是rosbash 命令集的一部分,允许直接切换工作目录至软件包或软件包集.
roscd [本地包名称[/子目录]]
roscd roscpp
roscd log
也属于rosbash 命令集,直接切换到日志文件夹下
rosls
rosbash 命令集可以直接按照软件包名称ls,不需要绝对路径
Tab自动补全
Tab补全等同于linux Tab
三. 创建ROS 程序包
1. catkin程序包的构成(catkin程序包必须符合以下文件)
- 程序包必须包含package.xml文件
- 程序必须包含CMakeLists.txt 文件,而Catkin metapackages中必须包括一个对CMakeList.txt 文件的引用
- 每个目录下只能有一个程序包,不能嵌套或者多个程序包共存
2. catkin工作空间中的程序包
工作空间中的程序包组织形式
workspace_folder/ -- WORKSPACE
src/ -- SOURCE SPACE
CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin
package_1/
CMakeLists.txt -- CMakeLists.txt file for package_1
package.xml -- Package manifest for package_1
...
package_n/
CMakeLists.txt -- CMakeLists.txt file for package_n
package.xml -- Package manifest for package_n
3. 创建catkin程序包
切换到前边创建的catkin工作空间中的src目录下
# You should have created this in the Creating a Workspace Tutorial $ cd ~/catkin_ws/src
使用catkin_create_pkg 创建新程序包,依赖于std_msgs, roscpp rospy
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
4. 程序包的依赖关系
程序包通常拥有一级依赖和间接依赖可以用以下命令查询
$ rospack depends1 beginner_tutorials
间接依赖查询
$ rospack depends beginner_tutorials
5. 自定义程序包
package.xml & CMakeLists.txt 的自定义编写
四. 编译ROS程序包
如果通过apt及软件包管理工具安装系统默认安装好依赖项
1. catkin_make工具的使用
在catkin工作空间下
$ catkin_make [make_targets] [-DCMAKE_VARIABLES=...]
工作流程一般为,也可通过–source my_src 指定外部源码位置
$ catkin_make #编译程序包
$ catkin_make install #安装程序包
2. 编译自己的程序包
切换到catkin工作空间下
$ cd ~/catkin_ws/
$ ls src
使用catkin_make 编译
$ catkin_make
编译完成可使用ls 查看工作空间下自动生成的文件,包括:build devel src
五. 理解ROS 节点
1. 安装轻量级模拟器
$ sudo apt-get install ros-<distro>-ros-tutorials
概念术语
2. ROS命令行
- 列出当前运行的ROS 节点信息
rosnode list
- 返回某个节点的信息,rosnode list 列出活跃节点后使用下面命令查看
rosnode info /rosout
3. rosrun运行包内节点(小乌龟模拟器启动)
rosrun turtlesim turtlesim_node
可使用上边rosnode list 查看
可以使用 rosnode ping my_turtle 测试
六. ROS topic 话题
1. 键盘控制乌龟行走
$ roscore
$ rosrun turtlesim turtlesin_node
$ rosrun turtlesim turtle_teleop_key
开启ROS ,开启ROS 乌龟模拟器,开启键盘监听节点使用键盘控制乌龟行走
2. rostopic命令工具介绍
安装rqt_graph kinetic版本
$ sudo apt-get install ros-<distro>-rqt $ sudo apt-get install ros-<distro>-rqt-common-plugins
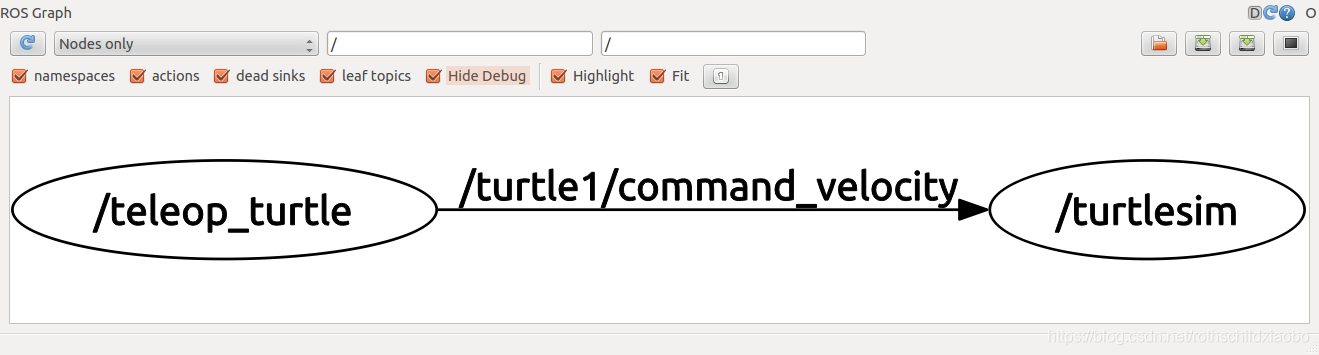
新终端中运行rqt,rqt可通过可视化的形式方便的查看各节点之间的话题
rosrun rqt_graph rqt_graph
rostopic命令工具下的子命令,
rostopic -h
rostopic bw display bandwidth used by topic rostopic echo print messages to screen rostopic hz display publishing rate of topic rostopic list print information about active topics rostopic pub publish data to topic rostopic type print topic type
命令的使用(使用echo命令即可将节点上的消息打印在屏幕上)
rostopic echo [topic]
rostopic scho /turtle1/cmd_vel
3. ROS Message
节点之间的通讯通过在topic上发送消息实现
rostopic type 命令查看发布话题的消息类型,应该会显示:geometry_msgs/Twist
rostopic type /turtle1/cmd_vel
rosmsg 可以查看消息的详细情况
rosmsg show geometry_msgs/Twist
显示如下:
geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z
4. rostopic 上的 rostopic pub 数据推送
推送乌龟行进坐标到话题上
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
rostopic hz 数据发送频率的查询
rostopic hz /turtle1/pose
5. rqt_plot 数据变化的绘图
教程中为$ rosrun rqt_plot rqt_plot 命令,实际直接使用rqt 即可调出plot窗口,如下

七. ROS服务和参数
服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response)
1. rosservice 命令
rosservice list 输出可用服务的信息 rosservice call 调用带参数的服务 rosservice type 输出服务类型 rosservice find 依据类型寻找服务find services by service type rosservice uri 输出服务的ROSRPC uri
工作流总结
rosservice list 查询节点可用服务
rosservice type clear 查询服务类型
rosservice call clear 调用clear服务,清空turtle_node 轨迹
rosservice type spawn| rossrv show 查看spawn类型
rosservice call spawn 2 2 0.2 “” 生成新的乌龟
2. Using rosparam
rosparam 使得我们能够存储并操作ROS参数服务器上的数据
rosparam set 设置参数 rosparam get 获取参数 rosparam load 从文件读取参数 rosparam dump 向文件中写入参数 rosparam delete 删除参数 rosparam list 列出参数名
rosparam list 列出turtlesim节点上的参数
rosparam set and rosparam get 设置背景及查询
rosparam set background_r 150 rosparam get background_g
rosparam dump & load 参数文件的写出及载入
rosparam dump params.yaml
rosparam dump params.yaml
将yaml文件重载进新的命名空间,如copy空间
rosparam load params.yaml copy
get 出来看下
rosparam get copy/background_b
八. 使用 rqt_console 和 roslaunch
1. 安装rqt & turtlesim
sudo apt-get install ros-<distro>-rqt ros-<distro>-rqt-common-plugins ros-<distro>-turtlesim
使用命令行打开rqt_console 和 rqt_logger_level查看报警等级
$ rosrun rqt_console rqt_console
$ rosrun rqt_logger_level rqt_logger_level
2. 使用roslaunch
roslaunch beginner_tutorials
3. 编写&解析launch 文件
- 算是标记语言
4. 使用launch启动两个小乌龟并发送速度
roslaunch beginner_tutorials turtlemimic.launch
发送移动命令
ostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
九. 使用rosed 编辑ros文件
1. 使用rosed编辑 文件
rosed roscpp Logger.msg
2. Tab 补全
tab
十. 创建ros消息和ros服务
1. 创建msg
创建msg文件夹及写入消息
$ cd ~/catkin_ws/src/beginner_tutorials $ mkdir msg $ echo "int64 num" > msg/Num.msg
修改packagexml.确保可以被转换为C++,Python
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>
配置运行依赖,添加 message_runtime 修改add_message_file 函数
2. 使用rosmsg
rosmsg show beginnet_tutorials/Num
十一. 编写消息发送器和订阅器
在beginn_tuturial下创建src文件夹,在里边编写talker.cpp listening.cpp文件
在CMakeList.txt文件中为可执行文件添加生成消息的依赖
编译文件 catkin_make
十二. 测试消息发布器和订阅器
1. source catkin工作空间下的setup.sh 文件
# In your catkin workspace $ cd ~/catkin_ws $ source ./devel/setup.bash
- 启动发布器和订阅器
$ rosrun beginner_tutorials talker (C++) $ rosrun beginner_tutorials talker.py (Python) $ rosrun beginner_tutorials listener (C++) $ rosrun beginner_tutorials listener.py (Python)
十三. rosbag数据录制及回放
1. 录制数据
rostopic list -v 显示所有话题
mkdir ~/bagfiless
cd ~/bagfiles
rosbag record -a
2. 检查并回放数据
rosbag info 检查数据
rosbag play 回放数据
十四. roswtf工具的使用
1. ros的安装检查及运行时检查
ros运行时和不运行时均可通过指令检查
roscd
roswtf
2. ros错误报告
roscd
ROS_PACKAGE_PATH=bad:$ROS_PACKAGE_PATH roswtf

















 3029
3029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









