






 本文详细介绍了如何在STM32开发环境中配置和使用DS18B20温度传感器,包括软件准备、CubeMx配置、代码修改、测试代码的编写及演示效果。文章提供了完整的工程链接供读者参考。
本文详细介绍了如何在STM32开发环境中配置和使用DS18B20温度传感器,包括软件准备、CubeMx配置、代码修改、测试代码的编写及演示效果。文章提供了完整的工程链接供读者参考。
前言
我们学完了AKEY的应用之后,就开始学习DS18B20的应用
一、软件准备
1、MDK4或者MDK5(可到官网或者其他途径获取,本人使用的是MDK5)
2、Cubemx(可到官网自行下载)
3、安装G4的包(1.2.0,1.3.0以及1.4.0均可)
4、串口调试助手(COM)
二、DS18B20
1.扩展板上模块的原理图以及我们需要配置的元素
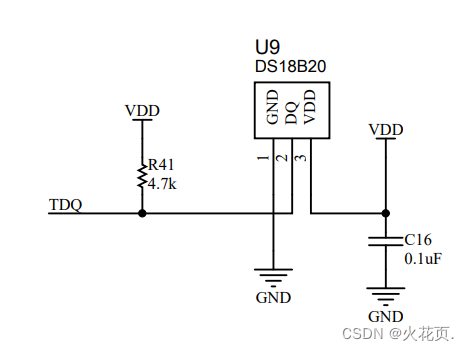
DS18B20部分原理图:
模块在扩展板的布局:
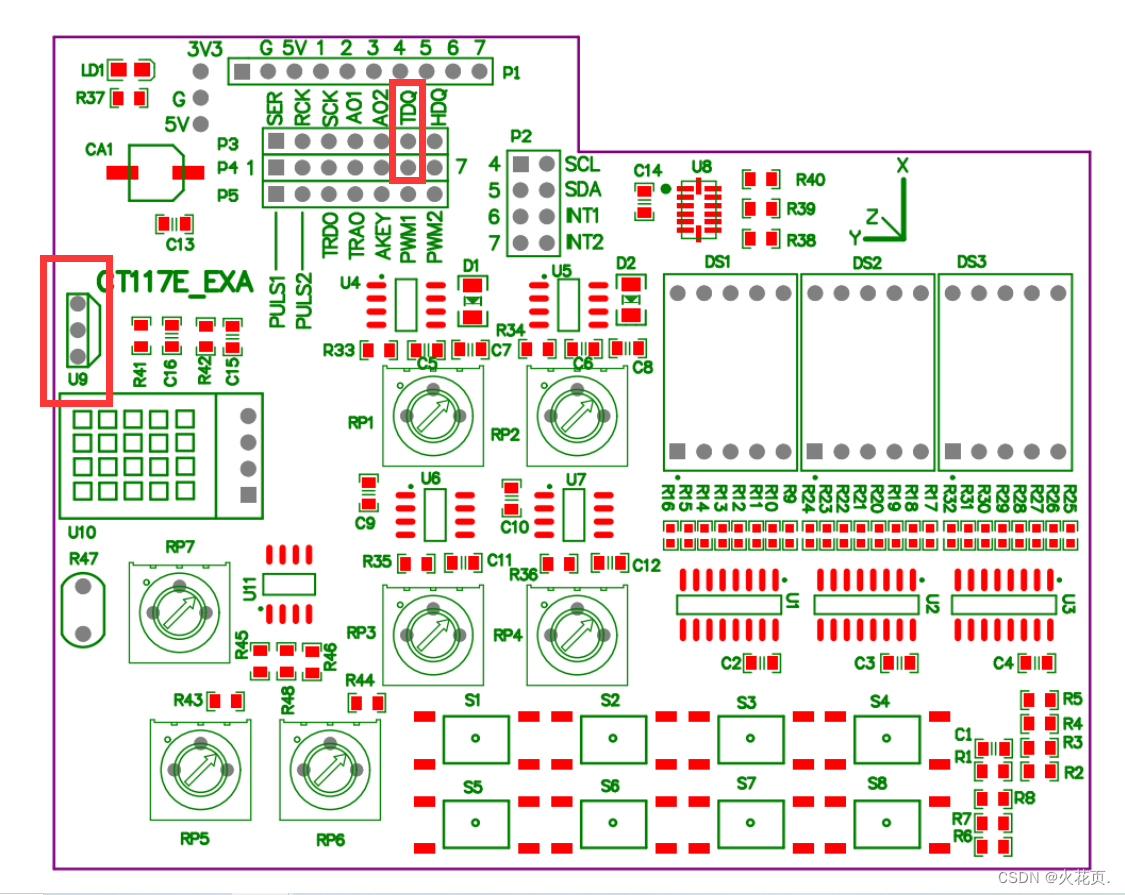
分析:TDQ连接的是PA6,引脚,修改以及应用官方所给的驱动,就能实现用DS18B20对温度的采集。
2.CubeMx的配置步骤
RCC配置:略
设置调试接口:设置为Serial Wire
到此配置完成,不需要配置IO口。
生成工程:点击GENERATE CODE生成工程。
3.代码修改
将驱动包的文件名修改为ds18b20.h和ds18b20.c
之后按照下图修改即可:
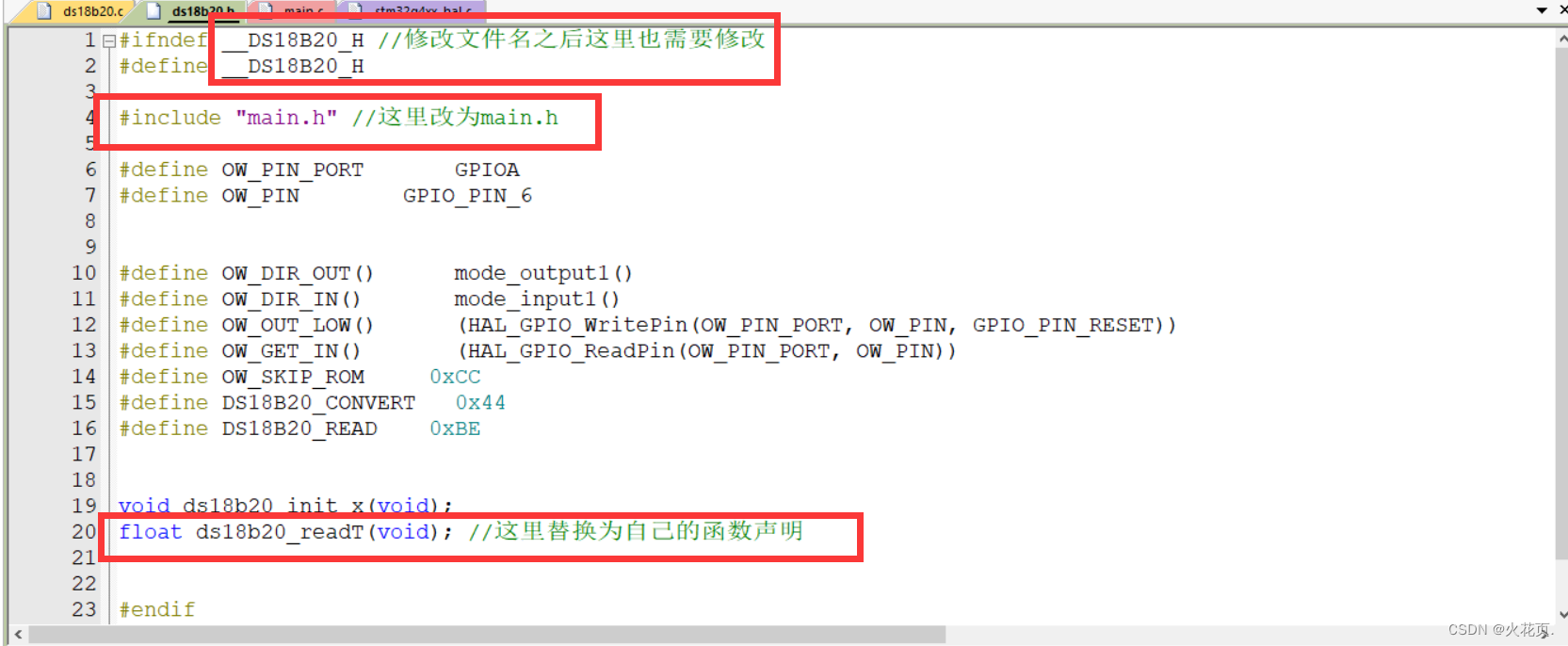
ds18b20.h:
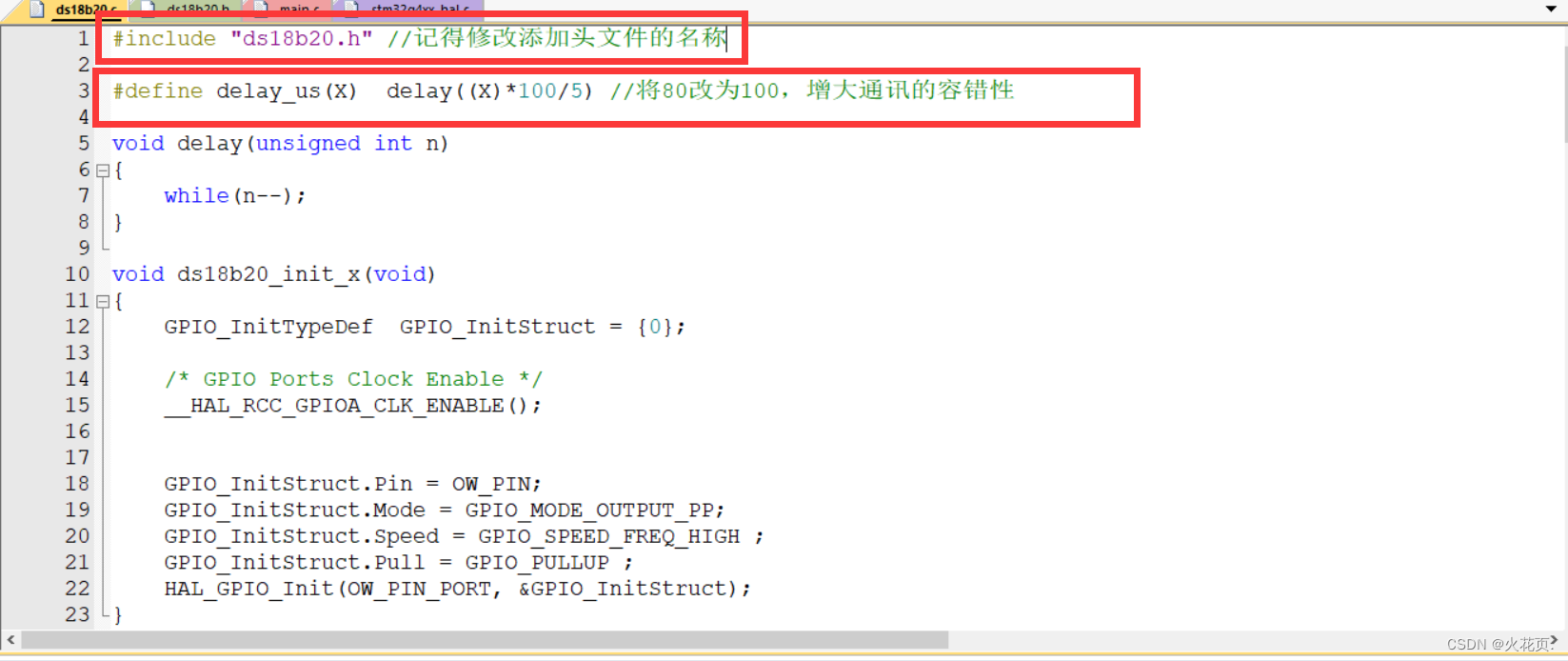
ds18b20.c:
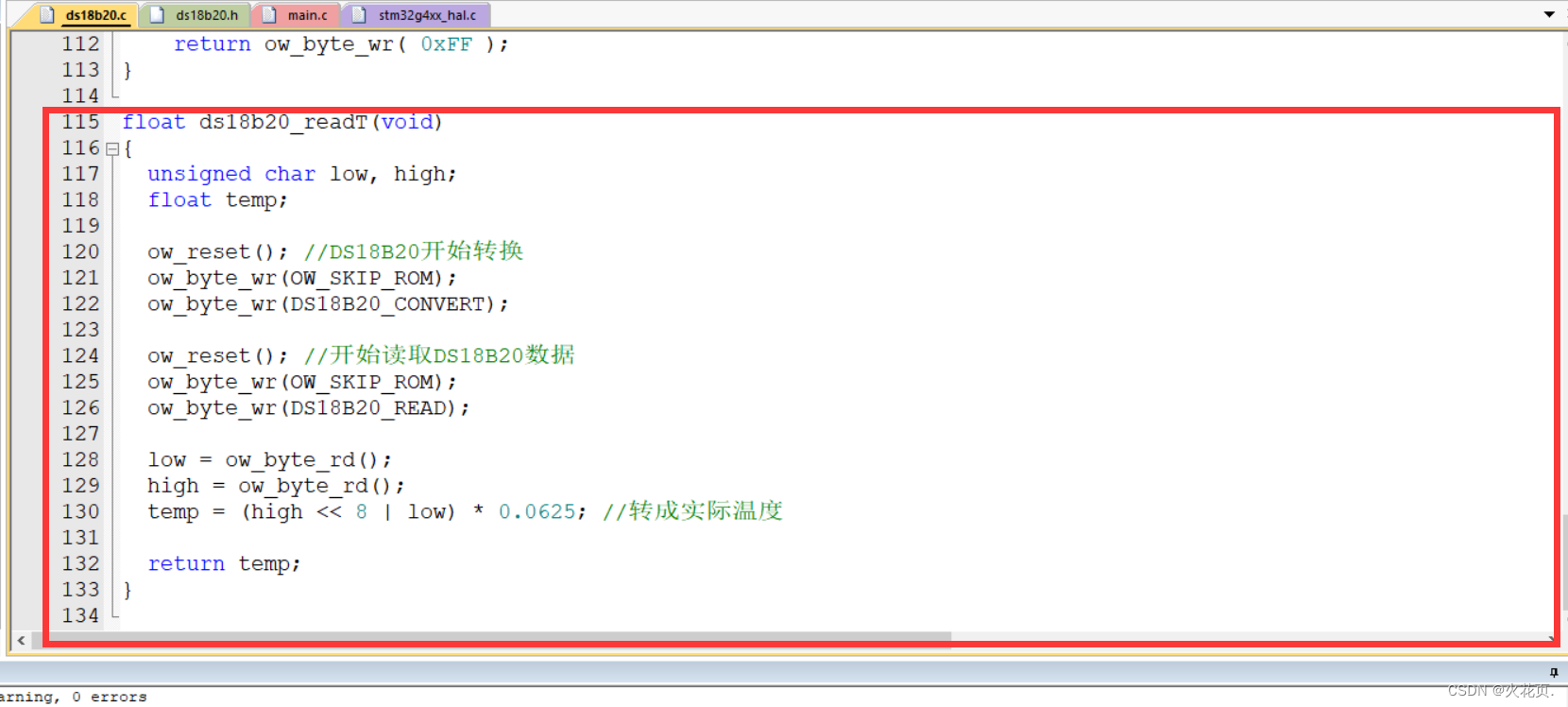
在ds18b20.c中增加的读取函数:
三、测试代码
代码修改完成之后,添加lcd.h, lcd.c, fonts.h到工程中以方便显示。
ds18b20.h:
#ifndef __DS18B20_H //修改文件名之后这里也需要修改
#define __DS18B20_H
#include "main.h" //这里改为main.h
#define OW_PIN_PORT GPIOA
#define OW_PIN GPIO_PIN_6
#define OW_DIR_OUT() mode_output1()
#define OW_DIR_IN() mode_input1()
#define OW_OUT_LOW() (HAL_GPIO_WritePin(OW_PIN_PORT, OW_PIN, GPIO_PIN_RESET))
#define OW_GET_IN() (HAL_GPIO_ReadPin(OW_PIN_PORT, OW_PIN))
#define OW_SKIP_ROM 0xCC
#define DS18B20_CONVERT 0x44
#define DS18B20_READ 0xBE
void ds18b20_init_x(void);
float ds18b20_readT(void); //这里替换为自己的函数声明
#endif
ds18b20.c:
#include "ds18b20.h" //记得修改添加头文件的名称
#define delay_us(X) delay((X)*100/5) //将80改为100,增大通讯的容错性
void delay(unsigned int n)
{
while(n--);
}
void ds18b20_init_x(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = OW_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH ;
GPIO_InitStruct.Pull = GPIO_PULLUP ;
HAL_GPIO_Init(OW_PIN_PORT, &GPIO_InitStruct);
}
//
void mode_input1(void )
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
GPIO_InitStruct.Pin = OW_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(OW_PIN_PORT, &GPIO_InitStruct);
}
void mode_output1(void )
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = OW_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Pull = GPIO_NOPULL ;
HAL_GPIO_Init(OW_PIN_PORT, &GPIO_InitStruct);
}
//
uint8_t ow_reset(void)
{
uint8_t err;
OW_DIR_OUT(); // pull OW-Pin low for 480us
OW_OUT_LOW(); // disable internal pull-up (maybe on from parasite)
delay_us(400); //about 480us
// set Pin as input - wait for clients to pull low
OW_DIR_IN(); // input
delay_us(66);
err = OW_GET_IN(); // no presence detect
// nobody pulled to low, still high
// after a delay the clients should release the line
// and input-pin gets back to high due to pull-up-resistor
delay_us(480 - 66);
if( OW_GET_IN() == 0 ) // short circuit
err = 1;
return err;
}
uint8_t ow_bit_io( uint8_t b )
{
OW_DIR_OUT(); // drive bus low
OW_OUT_LOW();
delay_us(1); // Recovery-Time wuffwuff was 1
if ( b ) OW_DIR_IN(); // if bit is 1 set bus high (by ext. pull-up)
#define OW_CONF_DELAYOFFSET 5
delay_us(15 - 1 - OW_CONF_DELAYOFFSET);
if( OW_GET_IN() == 0 ) b = 0; // sample at end of read-timeslot
delay_us(60 - 15);
OW_DIR_IN();
return b;
}
uint8_t ow_byte_wr( uint8_t b )
{
uint8_t i = 8, j;
do
{
j = ow_bit_io( b & 1 );
b >>= 1;
if( j ) b |= 0x80;
}
while( --i );
return b;
}
//
uint8_t ow_byte_rd( void )
{
return ow_byte_wr( 0xFF );
}
float ds18b20_readT(void)
{
unsigned char low, high;
float temp;
ow_reset(); //DS18B20开始转换
ow_byte_wr(OW_SKIP_ROM);
ow_byte_wr(DS18B20_CONVERT);
ow_reset(); //开始读取DS18B20数据
ow_byte_wr(OW_SKIP_ROM);
ow_byte_wr(DS18B20_READ);
low = ow_byte_rd();
high = ow_byte_rd();
temp = (high << 8 | low) * 0.0625; //转成实际温度
return temp;
}
main.h:没有做修改所以不放出
main.c:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "ds18b20.h"
#include "lcd.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
unsigned int Ttick;
float T;
unsigned char should_read = 1;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
//等待DS18B20温度转换完成,防止插拔接口时产生的误读
while((unsigned int)(ds18b20_readT()) == 85);
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
char text[30];
T = ds18b20_readT();
sprintf(text, "T:%.4f", T);
LCD_DisplayStringLine(Line0, text);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
四、演示效果

五、工程链接
六、总结
以上就是DS18B20的配置过程,测试代码以及测试效果
以往的扩展板模块:
【STM32G431RBTx】备战蓝桥杯嵌入式→扩展模块→SEG
【STM32G431RBTx】备战蓝桥杯嵌入式→扩展模块→双路ADC/AO1, AO2
【STM32G431RBTx】备战蓝桥杯嵌入式→扩展模块→光敏电阻/TRAO, TRAO
【STM32G431RBTx】备战蓝桥杯嵌入式→扩展模块→AKEY


















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









