






前言
此文章是对 https://blog.youkuaiyun.com/sy243772901/article/details/92832182 沉沙大佬 的学习总结,学习资料在链接中。
一、位置环控制
位置环控制搭建建立在双闭环控制基础上,增加了位置反馈控制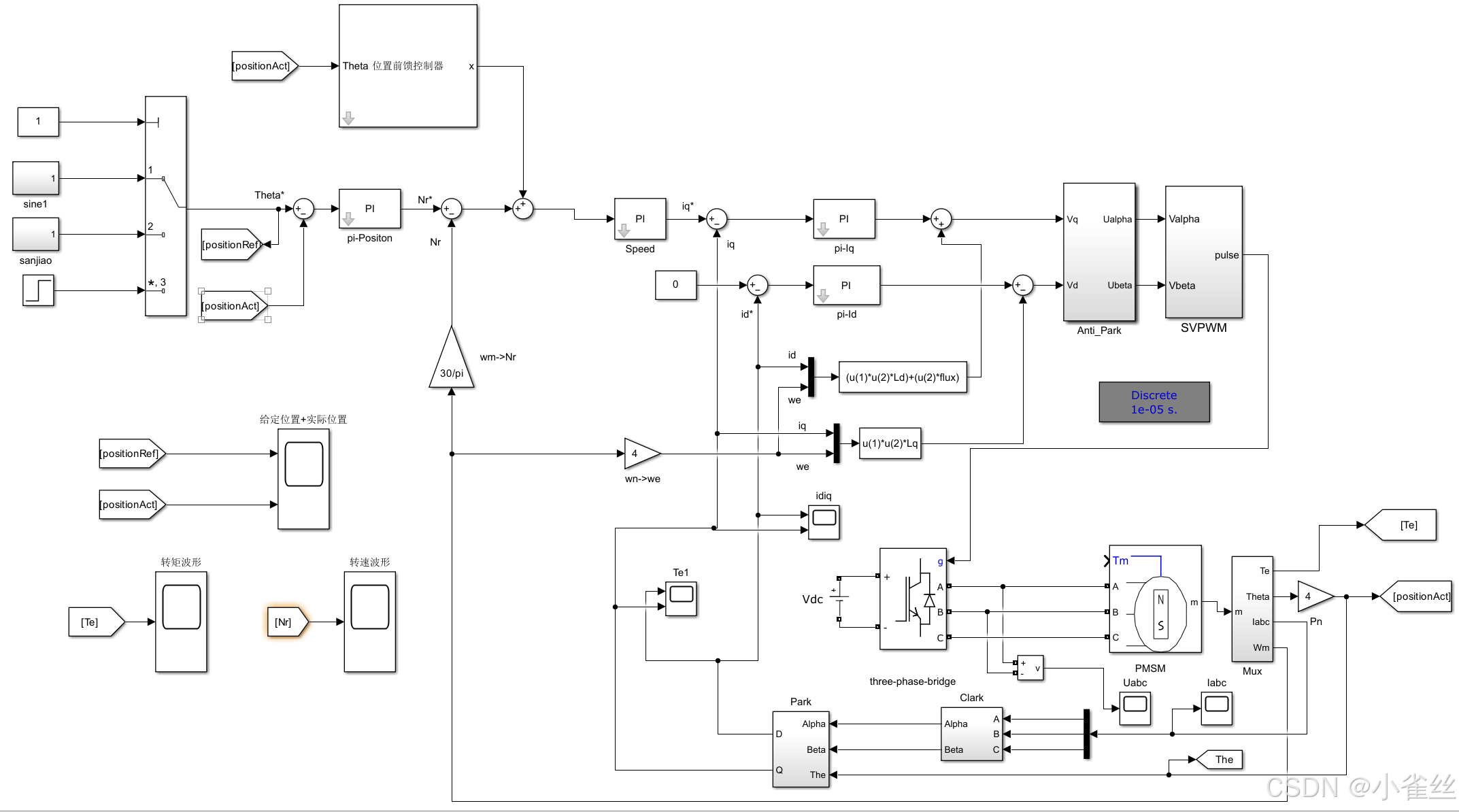
位置前馈控制器讲解: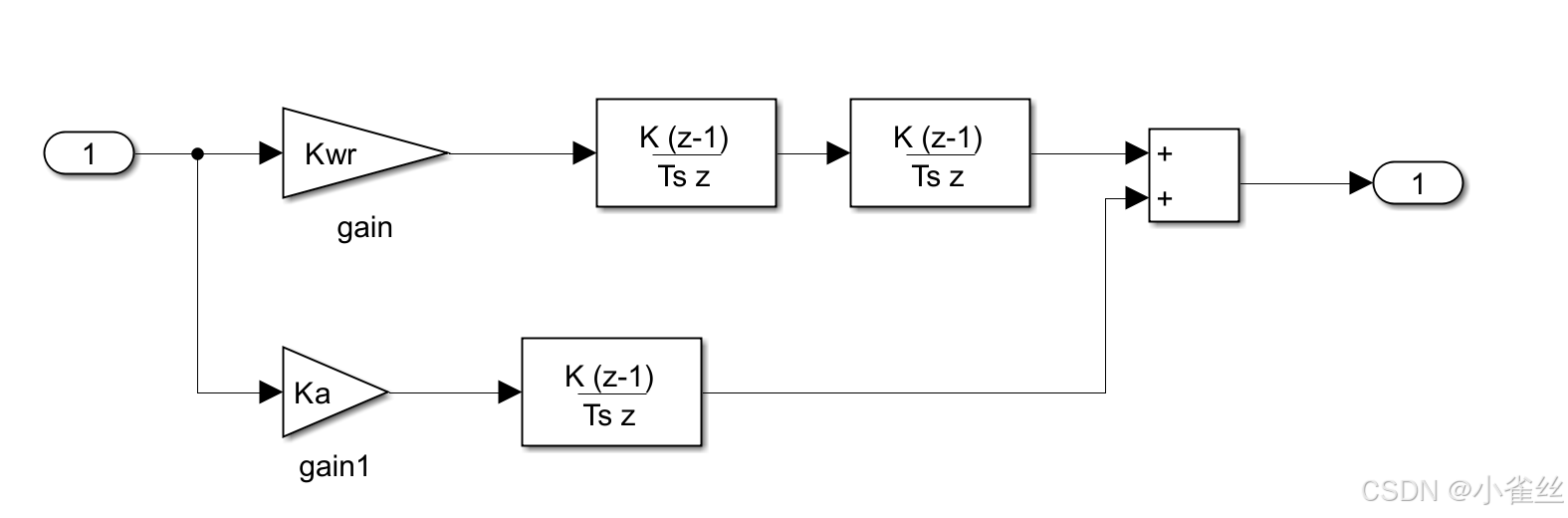
前馈补偿思想:
目标:通过预判扰动(如负载变化、摩擦力)或系统延迟,提前调整控制量,使输出尽可能接近期望值。
特点:无闭环反馈,仅依赖输入信号(含扰动信息)进行计算。
信号处理步骤:
参考信号路径:Kwr是给输入信号(比如位置指令)提供一个增益,然后在K(z-1)/Ts是模拟系统相应延迟(几乎所有物理系统都存在信号传递和处理的延迟,比如传感器延迟:测量物理量(如位置、速度)需要时间。)
扰动补偿路径:另一分支信号(如实时测量的扰动)经增益 Ka 放大并通过相同延迟模块处理。
示例:若扰动具有高频成分,可通过调整 Ka 快速补偿。
然后最后是信号的合成
二、参数整定过程
1.参数整定原则
原则1:初始参数设计为纯P调节器(Ki=0)
避免超调风险:
位置控制(如机械臂抓取、机床定位)通常严格要求零超调,否则可能导致物理碰撞或加工误差。
PI控制器的积分项(Ki)会持续累积误差,即使系统已稳定,仍可能导致输出“过冲”。
初始阶段关闭积分(Ki=0),仅用比例调节(P),可优先保证系统响应的快速性和无超调。
简化调试流程:
从纯P开始,逐步引入积分(Ki),能更清晰地观察系统对指令的响应特性。
若直接启用PI控制,参数耦合可能导致难以分辨问题是源于Kp还是Ki。
示例:
机器人关节控制中,若指令为阶跃转角,纯P调节器可通过调整Kp使输出迅速跟踪指令,而不会因积分项导致角度过度旋转。
原则2:初始Kp设为100
平衡响应速度与稳定性:
位置环要求快速响应指令变化(如缩短上升时间),较大的Kp能放大误差信号,迫使控制器更快输出调节量。
初始值设为100是一个经验值,既不会因Kp过小导致响应迟缓(如机械臂动作滞后),也不会因Kp过大引发高频振荡。
适配常见系统特性:
多数工业设备(如步进电机、伺服电机)的闭环带宽较高,可通过较大Kp实现快速响应。
100的初始值提供了一个基准,后续可根据实际测试结果(如超调量、稳态误差)进行微调。
示例:
若电机额定转速为3000 RPM,初始Kp=100可使位置环输出(即速度给定)迅速达到3000 RPM(假设误差为1单位时输出为100 * 1=100单位),从而加快定位速度。
原则3:限幅值根据电机额定转速设置
物理执行器保护:
位置环的输出通常作为速度环的给定值,若输出超过电机额定转速,可能导致电机过热、减速甚至损坏。
设置Upper/Lower限幅(如±3000 RPM对应额定转速),可确保控制量始终在安全范围内。
避免系统不稳定:
过大的速度指令可能超出执行器的跟踪能力,导致位置环输出与实际位置偏差持续增大,引发失控。
限幅值相当于为系统添加了一个“硬约束”,防止控制器因追求快速响应而输出不可实现的控制量。
示例:
若电机最大转速为5000 RPM,则将Upper设为5000、Lower设为-5000,可防止速度指令超出电机能力范围。
2.详细整定过程
红线是给定位置,蓝线是实际位置,目的是让蓝线无限贴合红线
先给Kp=100,明显小了
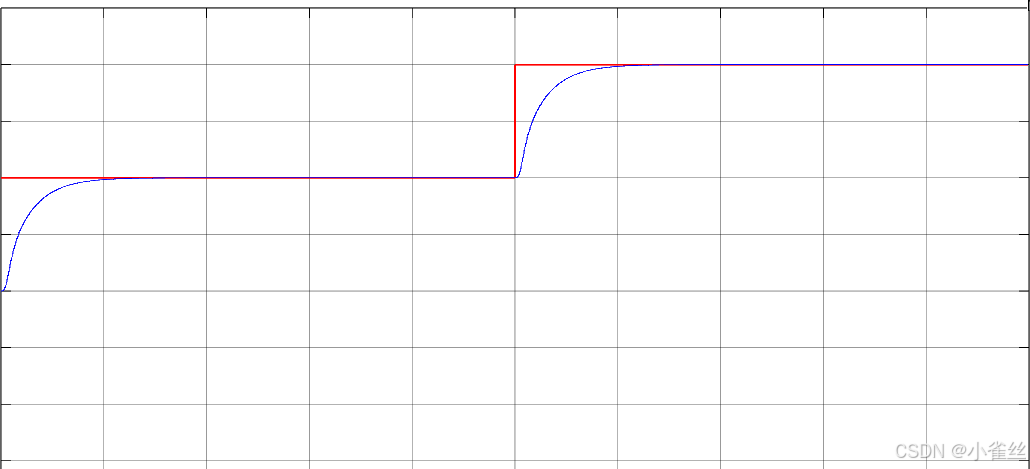
再给Kp=1000,发现超调严重且有震荡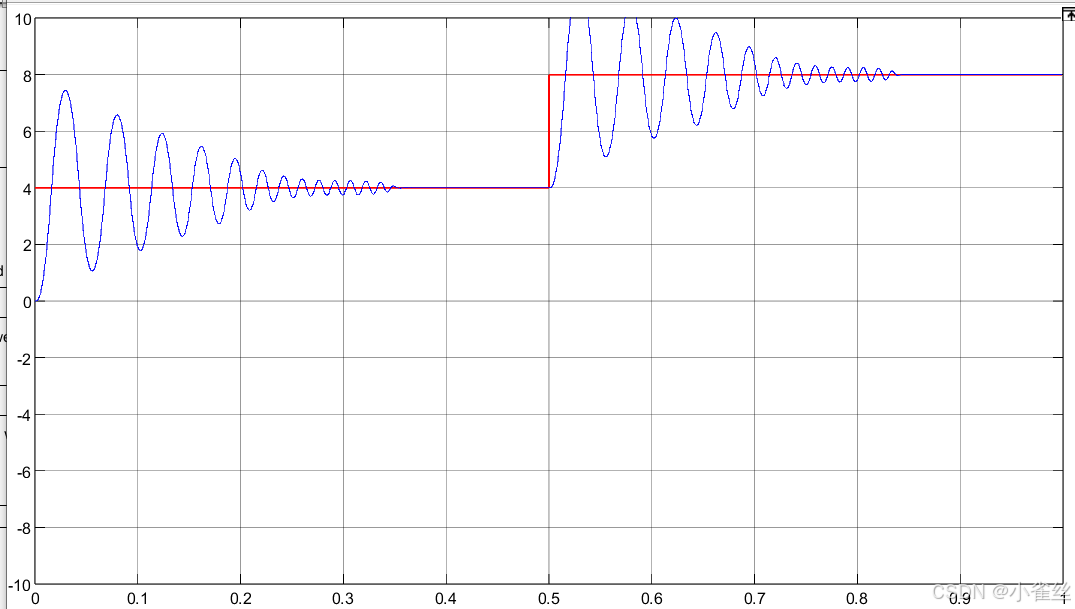
给Kp=250,效果明显好了很多,跟随反应更快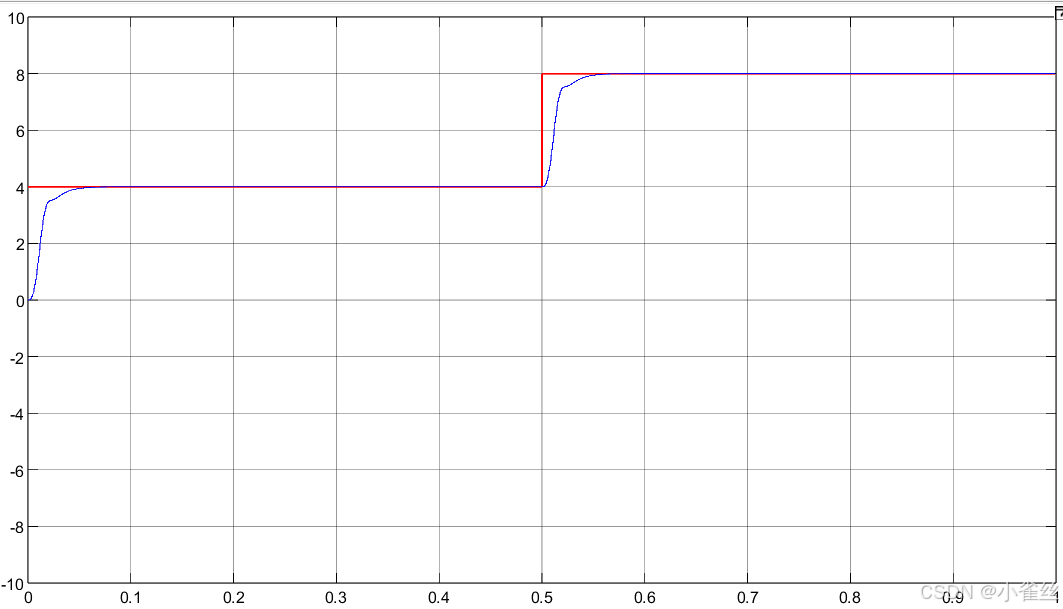
位置环参数优化过程 :
上述输入为典型输入,且频率较低。在基本的调参结束后,对输入进行升频和
换形,再来观察效果,优化参数。
为什么要进行升频?
核心目的
通过提高输入信号的频率,观察系统在高频段的动态响应特性,从而优化控制参数(如PID增益、滤波器截止频率),避免以下问题:
高频共振风险:系统可能存在固有共振频率,高频信号会放大振动或噪声,导致输出不稳定。升频可提前发现并抑制这类问题。
带宽不足:若系统带宽较低(如机械惯性大),高频指令信号会被衰减,导致响应延迟。升频可验证系统带宽是否满足需求。
低频干扰掩盖高频特性:实际系统中低频扰动(如负载波动)可能掩盖高频敏感性问题。升频可通过隔离高频信号单独分析系统性能。
为什么要进行换形?
通过改变输入信号的形态(如波形、幅值、相位),全面评估系统对非理想信号的鲁棒性和适应性,解决以下问题:
非线性系统特性:实际系统(如电机、液压缸)存在非线性(如摩擦力突变),方波/三角波信号比正弦波更能暴露这类问题。
噪声敏感性:添加随机噪声或脉冲干扰,测试系统滤波能力和抗干扰能力。
相位滞后验证:使用不同相位的信号(如正弦波与延迟版本叠加),分析系统相位裕度是否充足。
总结
位置环调参的本质确实是在响应速度与稳定性之间寻找平衡。当系统响应速度快时,可能产生震荡;而追求稳定性时,又可能导致系统的快速跟随性能下降。所以调参的目的就是寻找这个中间区域。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









