







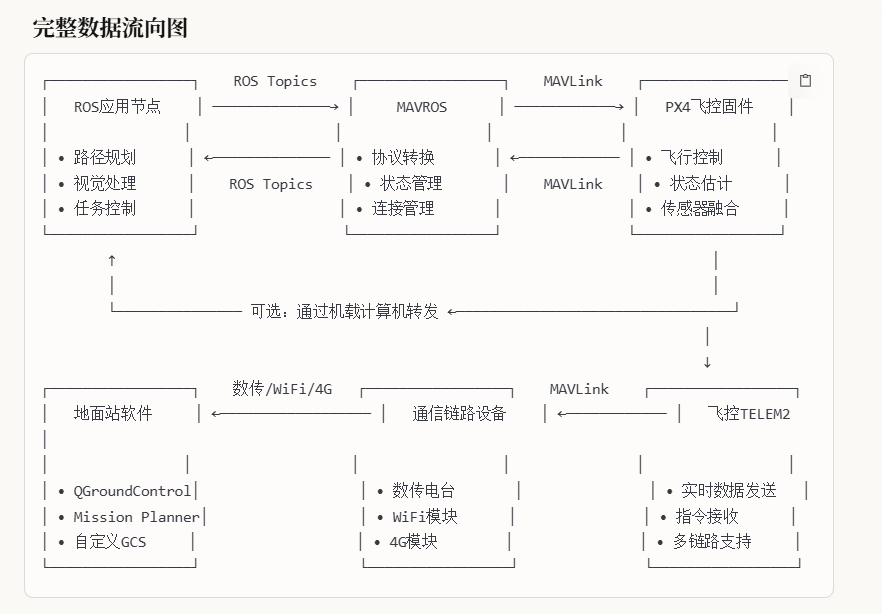
完整的无人机通信链路总结:
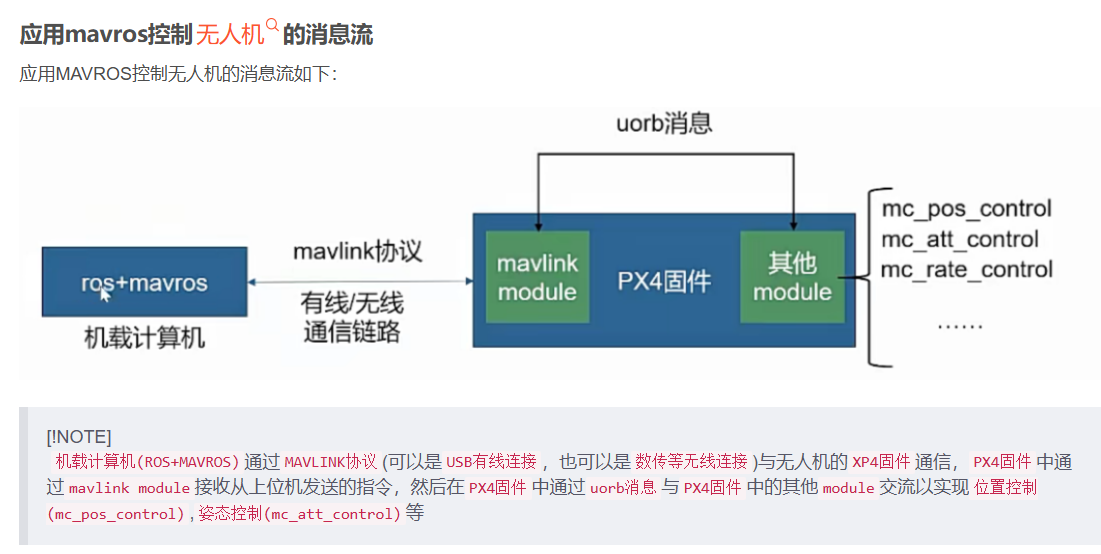
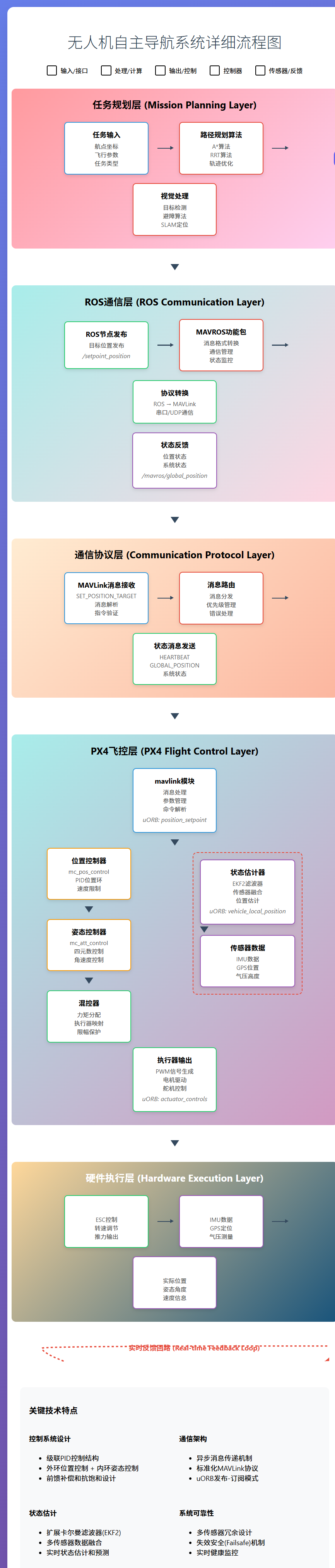
机载计算机上的Ubuntu系统运行ROS框架,你编写的ROS节点通过发布控制指令话题(如位置、速度指令)与MAVROS通信,同时订阅MAVROS发布的状态反馈话题(如当前位置、飞行状态);MAVROS作为协议转换中间件,将ROS消息格式转换为MAVLink协议消息,通过串口或UDP与PX4飞控进行双向通信;飞控接收MAVLink指令后执行飞行控制,同时将飞行状态、传感器数据等信息通过MAVLink协议发送回机载计算机,并通过另一个通信端口(如数传电台、WiFi或4G模块)将MAVLink消息传输到地面站软件(如QGroundControl),实现远程监控和控制,整个系统形成"ROS应用↔MAVROS↔飞控↔地面站"的完整通信闭环。

















 8518
8518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









