







本文对无位置控制中的滑膜观测器进行思路梳理,并对扩展反电动势进行简要介绍。
知识储备:状态空间方程,符号函数,分情况讨论的概念。
一、状态空间方程列写
1.1 反电动势
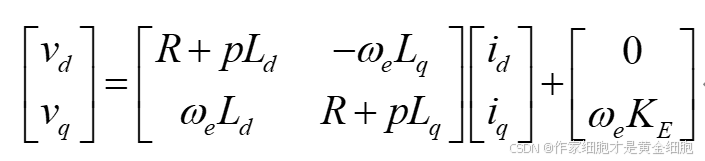
旋转坐标系下电压方程:
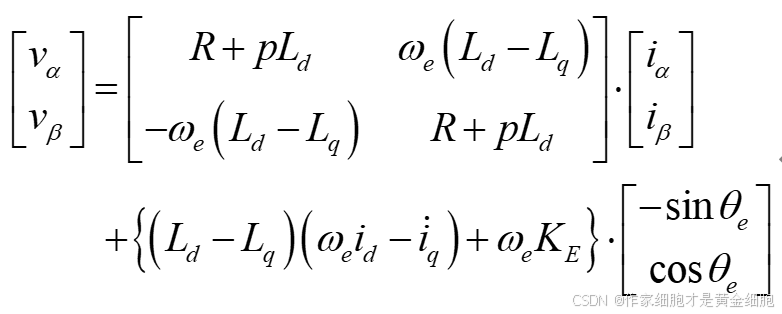
直接变换到静止坐标系下电压方程:

其中:

(具体计算过程参考:推个公式 | 三相永磁同步电机静止坐标系下电压方程推导_电机旋转坐标系到静止坐标系推导-优快云博客)
可以看出,方程内有两处包含位置角信息,且存在sin2θ项,不便于θ信息获取。扩展反电动势应运而生。
1.2 扩展反电动势
对原电压方程改写:

变换到静止坐标系下电压方程:
上式即为同步电机的数学模型通式。
当Ld≠Lq时,为内嵌式同步电机公式;
当Ld=Lq时,为表贴式同步电机公式;
当KE=0时,为同步磁阻电机公式。
我们定义后一项为扩展反电动势,静止坐标系下的电压方程写作:
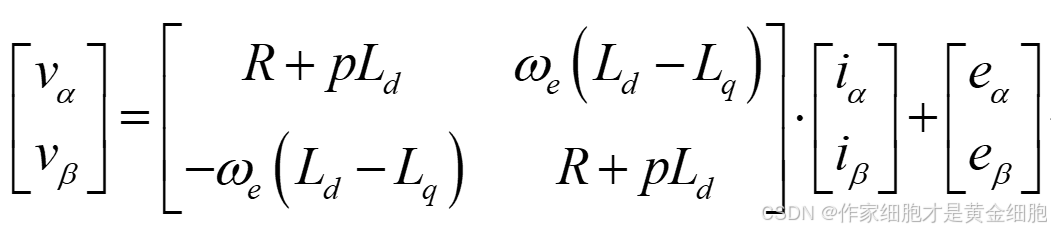

可以看到,此时只有扩展反电动势中包含转子位置角。因此我们需要获取扩展反电动势信息,进而得到角度,从而实现无位置控制。
我们是在电流环中进行控制,即被控量是电流。因此,我们把被控量放在等式左边,重写状态空间方程为:

(本文主要为了理解思路,因此以简单情况切入)假设Ld=Lq,电机参数已知,则通过上式子我们可以直接算出扩展反电动势值,后文简称“反电动势”。但是在实际情况下,由于各种干扰等存在,计算出的值并不准确,存在较大误差,因此我们采用滑膜观测器来进行反电动势获取。
二、滑膜观测器
2.1 反电动势估计
首先对估计电流和反电动势进行列写:
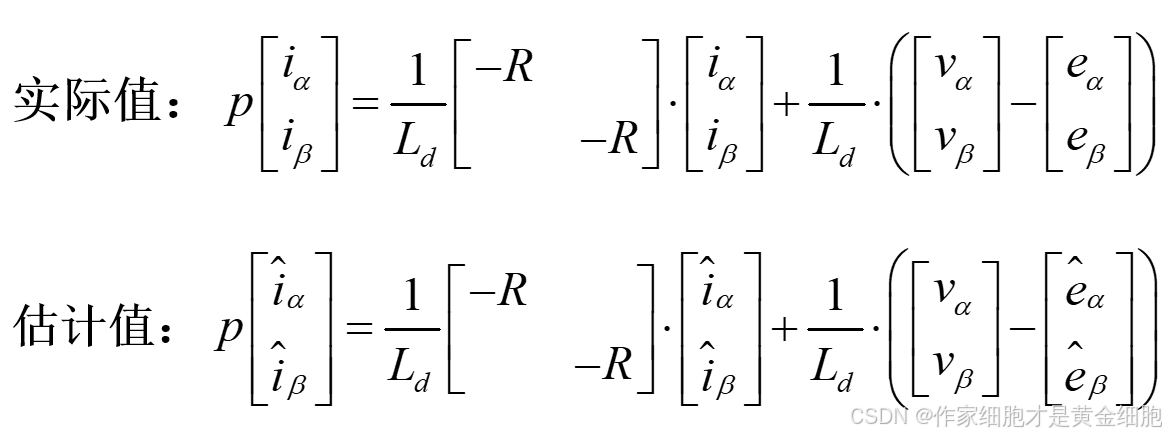
直接控不好控,我们做差间解控。用估计值-实际值:

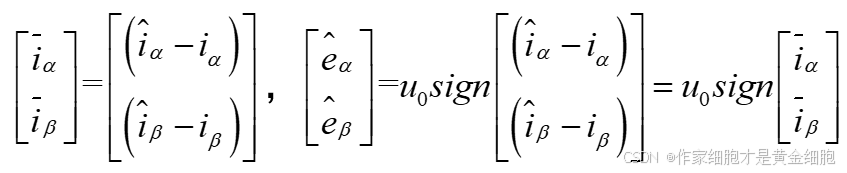
当估计值和实际值等价时,我们估计的反电动势就等于实际的反电动势了(这里采用常值切换函数sign)。这就是滑动模态,要保证这个滑动模态一直存在,要保证V*V‘ < 0(李雅普诺夫第二法则),即:

观察上式可知,A项一定小于零,B项分情况可以写为:
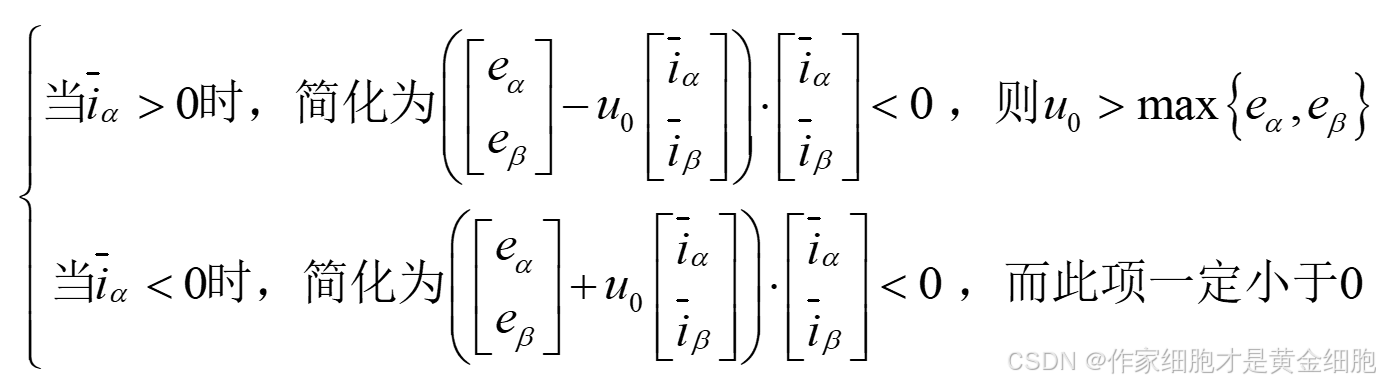
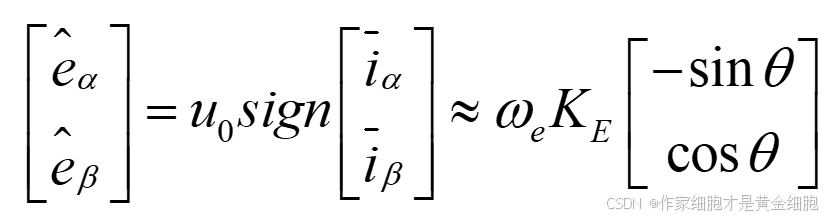
至此,确定了滑膜控制面的值,即得到了估计的反电动势值。
2.2 反正切获取转子位置及转速
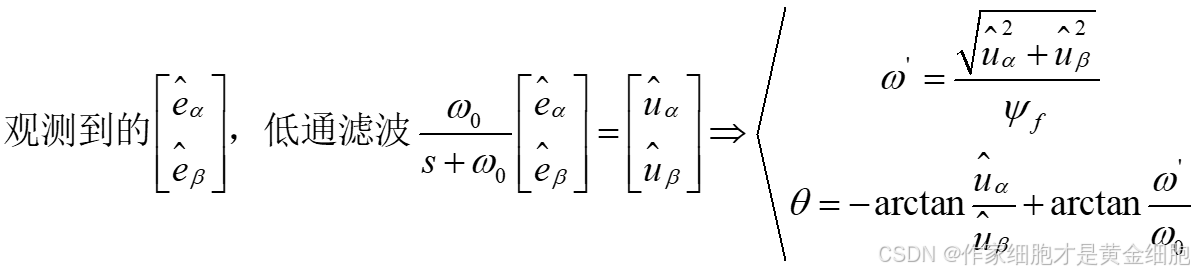
反电动势中包含转子位置信息即:
转速及转子位置角获取:
补充:
李雅普诺夫第二法则:对于连续时间系统,如果存在一个连续可微的李雅普诺夫函数,满足以下两个条件:
1.正定,即
;
2.负定,即
;
则系统渐近稳定,综上总结为:
仿真结果分析:电机控制 | 基于反正切的滑膜观测电机控制仿真及问题记录-优快云博客
参考博客:【电机控制】PMSM无感FOC控制(七)滑模观测器的应用_滑膜观测器-优快云博客
如果此篇文章对您有帮助,记得评论告诉我(●'◡'●),您的点赞和收藏是对写作者最大的鼓励!


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











