







 文章介绍了正交编码器的工作原理,其两个输出A相和B相用于STM32的编码器接口,控制计数器CNT根据旋转方向自增或自减,从而确定位置和速度。编码器接口利用输入捕获滤波器和边沿检测,提供高精度和抗噪声能力。通过编码器接口,可以实现资源高效的测速功能,例如每秒读取并清零CNT值来计算编码器的速度。
文章介绍了正交编码器的工作原理,其两个输出A相和B相用于STM32的编码器接口,控制计数器CNT根据旋转方向自增或自减,从而确定位置和速度。编码器接口利用输入捕获滤波器和边沿检测,提供高精度和抗噪声能力。通过编码器接口,可以实现资源高效的测速功能,例如每秒读取并清零CNT值来计算编码器的速度。

编码器简介:
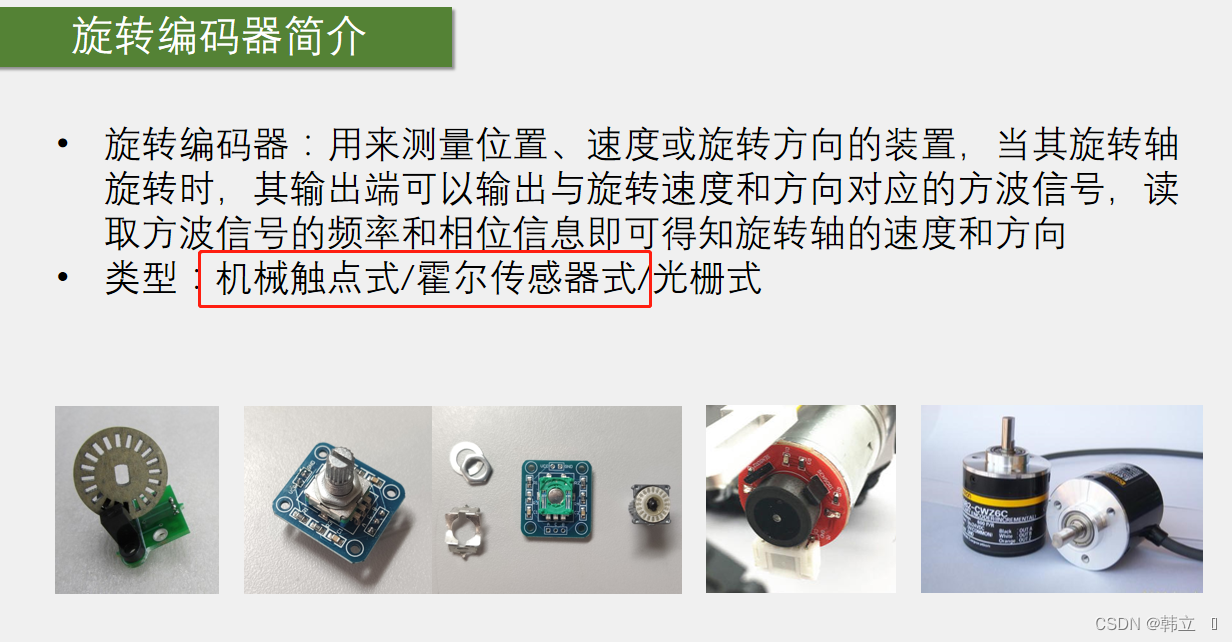
例子讲解:正交编码器有两个输出,一个A相,一个B相,AB接口输出正交信号。然后接入STM32的定时器的编码器接口,编码器接口自动控制定时器时基单元中的CNT计数器进行自增或自减,比如初始化之后,CNT初始值为0,然后编码器右转,CNT就++,右转产生一个脉冲,CNT就加一次,比如右转产生10个脉冲(上升沿或者下降沿)之后,停下来,那么这个过程CNT就由0自增到10,停下来,编码器右=左转,CNT--,左转产生一个脉冲,CNT减一次,比如编码器再左转产生5个脉冲,那就在原来10的基础上自减5,停下来。
这个编码器接口,其实就相当于是一个带有方向控制的外部时钟,它同时控制这CNT的计数时钟和计数方向,这样的话,CNT的值就表示了编码器的位置,如果我们每隔一段时间取一次CNT的值,再把CNT清零,是不是每次取出来的值就表示了,编码器的速度,由上一篇笔记中的测频法和测周法的知识,这个编码器就是测频法测正交脉冲的频率,CNT计次然后每隔一段时间去一次计数值,只不过这个编码器接口更加高级,它能根据旋转方向,不仅可以自增计次,还可以自减计次,是一个带方向的测速
编码器接口资源比较紧张,如果一个定时器被配置成编码器接口模式,那它基本上就干不了其他的活了(如STM32F103C8T6只有4个定时器,所以最多只能接4个编码器),如果编码器不够用的话就要考虑一下资源够不够用,也可通过使用EXTI外部中断这就是用软件资源弥补硬件资源
每个定时器的CH3和CH4不能接编码器
正交编码器:

用正交信号的好处:
a、正交信号精度更高,因为A、B相都可以计次,相当关于计次频率提高了一倍
b、其次正交信号可以以抗噪声,因为正交信号两个信号必须是交替跳变的,可以设计一个抗噪声电路,如果一个信号不变,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 693
693

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









