







一. PnP问题(求解相机坐标到世界坐标的坐标变换)
相机坐标一般是归一化相机坐标(即z轴数值恒为1的坐标)
求解PnP问题的方法有:P3P(3对点估计位姿),DLT(直接线性变换),EPnP,UPnP,非线性优化(Boundle Adjustment)
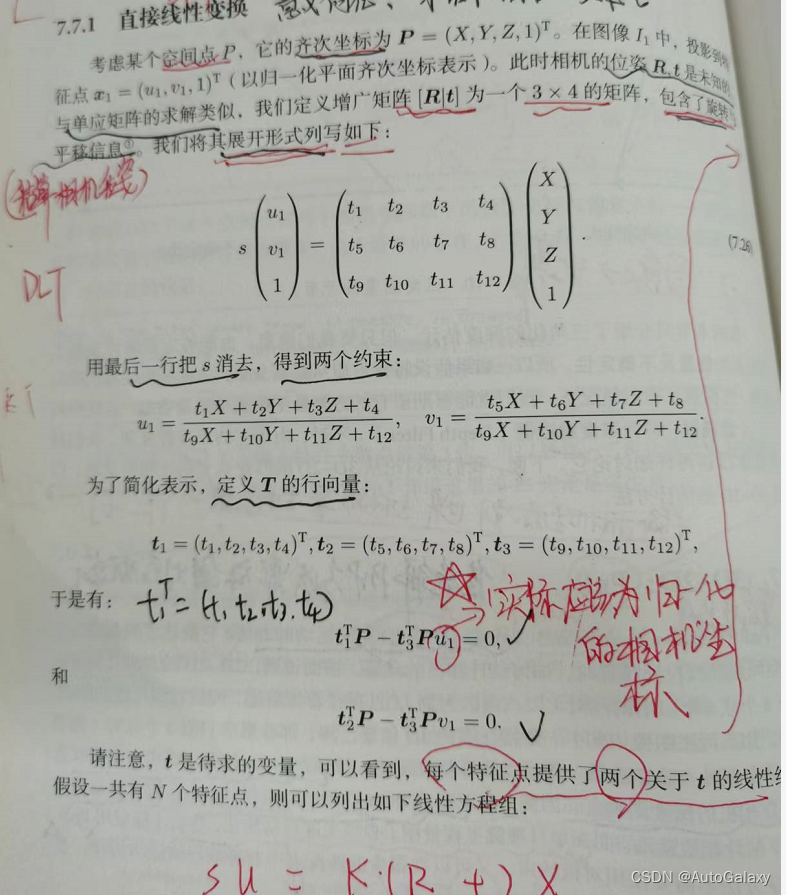
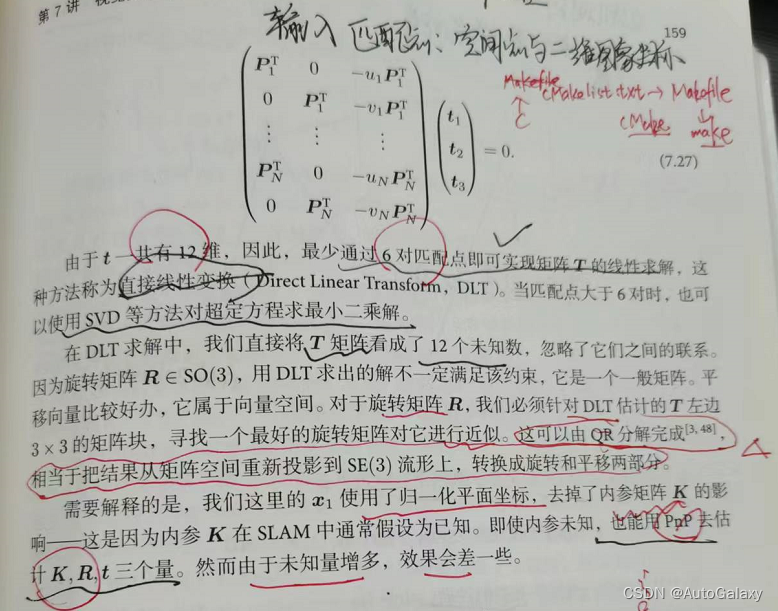
1.1 DLT
DLT与三角化使用的方法其实类似,只不过三角化是 多幅图像帧对同一个特征点的观测,而这里使用的是一幅图像帧观测到的多对特征点(这里至少6对,才能估计出R和T)
NOTE:最后计算出来的结果需要经过一定的处理才能得到最后正确的处理,这里得自己去看论文。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









