






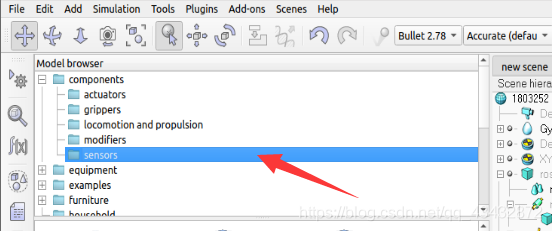
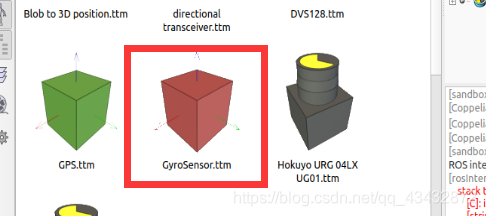
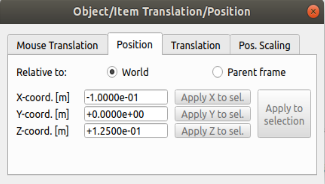
 本文介绍了如何在ROS中设置小车的初始位置,并详细阐述了如何添加激光雷达、加速度计和陀螺仪传感器。激光雷达置于地面上方的固定位置,加速度传感器作为小车的‘鼻子’,两者均保持Y轴不变。陀螺仪传感器的Z轴需与加速度传感器的Z轴一致,确保传感器定位准确。
本文介绍了如何在ROS中设置小车的初始位置,并详细阐述了如何添加激光雷达、加速度计和陀螺仪传感器。激光雷达置于地面上方的固定位置,加速度传感器作为小车的‘鼻子’,两者均保持Y轴不变。陀螺仪传感器的Z轴需与加速度传感器的Z轴一致,确保传感器定位准确。
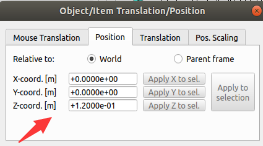
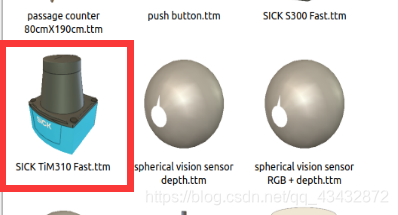 此为激光雷达,放置的位置位于地面上方固定位置
此为激光雷达,放置的位置位于地面上方固定位置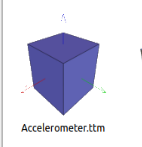



















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包


 865
1万+
2042
915
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
865
1万+
2042
915
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








