






 文章主要探讨了PX4飞行控制器的源码结构,重点包括CMAKE编译脚本、ROMFS启动脚本中的rcs文件,以及SRC目录下的模块代码。mavlink负责通信协议,debug目录包含调试脚本,而drivers和systemcmds分别涉及硬件驱动和系统命令。对于内存有限的硬件,不使用的驱动可以被注释掉。文章适合于进行源码学习和理解代码框架的读者。
文章主要探讨了PX4飞行控制器的源码结构,重点包括CMAKE编译脚本、ROMFS启动脚本中的rcs文件,以及SRC目录下的模块代码。mavlink负责通信协议,debug目录包含调试脚本,而drivers和systemcmds分别涉及硬件驱动和系统命令。对于内存有限的硬件,不使用的驱动可以被注释掉。文章适合于进行源码学习和理解代码框架的读者。
PX4源码下载:
链接:https://pan.baidu.com/s/1QUS28Fykwmq8ZMZGmnNJ2g
提取码:j92r
代码作用

只关心:代码中CMAKE为编译脚本,ROMFS为启动脚本(rcs为总启动脚本)SRC为下的module为源码(功能代码)
mavlink:通信协议,debug:调试
脚本中:
drivers:驱动(用不到的就注释,不然占内存,硬件资源有限)
systemcmds:系统命令
modules:源码
学习内容:
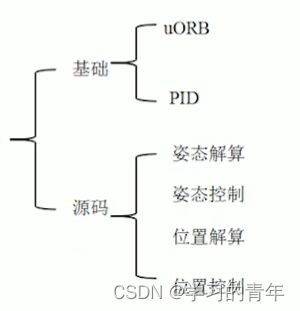
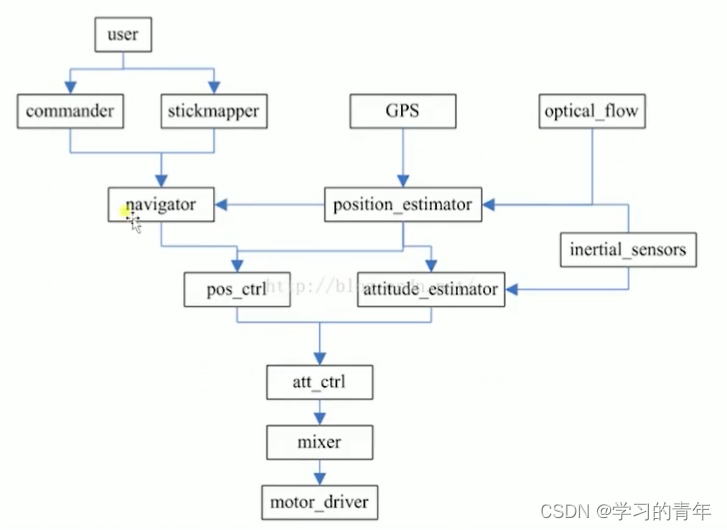
代码框架:


















07-25
12-30
 7882
7882
7882
01-14
6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









