






- Environmental Configuration:
- Ubuntu: 20.04 (noetic)
- webots version: 2023a (test the 2020a rev, it does not work)
- VMware Workstaion (run the Ubuntu 20.04)
stpts:
- install the ros
- downloda the webots form the official website
- build a ros workspace and git clone the webots_ros package to the src dir
- catkin build
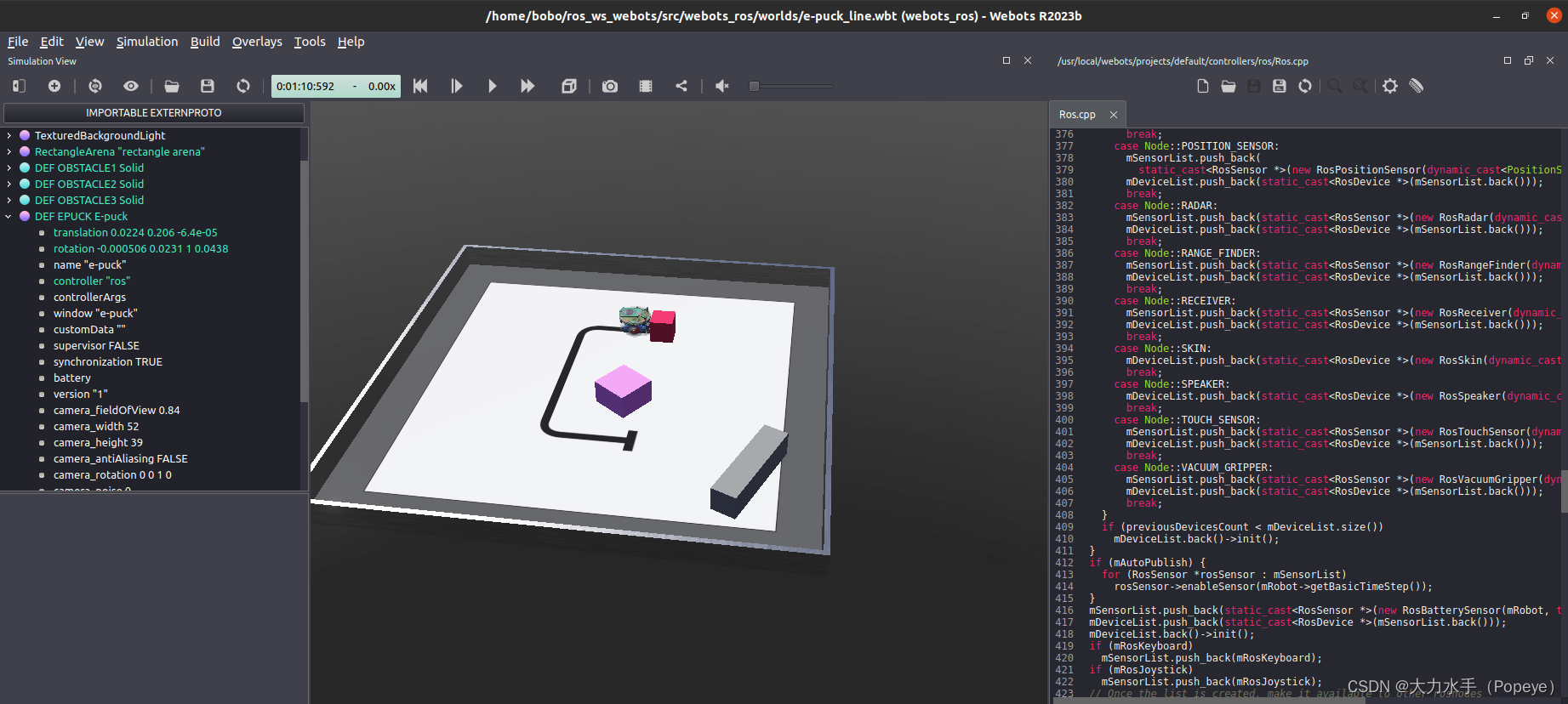
- rosluanch the samples (roslaunch webots_ros pioneer3ar.launch)
result:

















 1546
1546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









