




四轴飞行器学习笔记
程序员除了素质一无所有
纯手工打造
独具匠心
Mr_zhang
文章目录
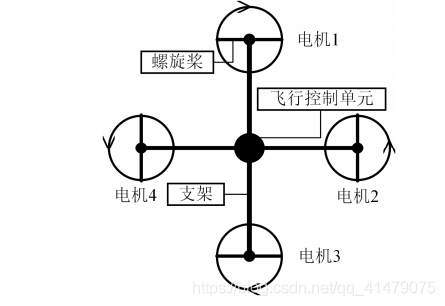
四轴飞行器飞行原理
就是指四轴飞行器,电机安装的位置。十模式,前进方向与四轴其中的一个电机一样,,X模式飞控的箭头指的方向则是两个电机的的中间
其基本的运动状态分别为
- 垂直运动
- 俯仰运动
- 滚转运动
- 偏航运动
- 前后运动
- 侧向运动
机翼
四个旋翼的结构和半径都相同,旋翼1和旋翼3顺时针旋转,旋翼2和旋翼4逆时针旋转,这样设计可以抵消陀螺效应和空气动力扭矩效应而导致的飞行器自旋。
陀螺仪
在四周飞行器中,陀螺仪是一种用于测量四轴飞行器旋转速度的传感器
那么,在小四轴上,陀螺仪的作用是什么呢?
- 我们知道,把一个物体悬浮在空中的方法可以是给物体的四个角施加拉力。如果物体某个方向的力度不够,那么物体就会因为重力的作用朝这个方向倾斜。通过在该物体上装上陀螺仪,就可以知道物体倾斜的方向,然后据此调整物体四个角的拉力,就可以达到让物体悬浮的目的。
倾角传感器(角度传感器,并不是四轴飞行器常用部件):
倾角传感器用于相对于参考水平的系统倾斜角度的测量,分为单轴,双轴,单轴只能测一个方向上的倾角,双轴能同时测两个方向上的倾角。从工作原理上可分为“固体摆“,”液体摆“,”气体摆“三种倾角传感器,还有加速度传感器测量倾角。
角速度传感器(角速率传感器、陀螺仪)
线加速度计的原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量) 我们只需要测量F就可以了。
多数加速度传感器是根据压电效应的原理来工作的。
所谓的压电效应就是 "对于不存在对称中心的异极晶体加在晶体上的外力除了使晶体发生形变以外,还将改变晶体的极化状态,在晶体内部建立电场,这种由于机械力作用使介质发生极化的现象称为正压电效应 "。
电子罗盘
指的是利用现代的传感器技术,能够输出数字方位信号的传感器,替代老式的指南针,方便与其他电子系统接口。广泛应用在,手持式仪器仪表、机器人导航、定位、航行系统、船用自动舵、八木天线定位、车载GPS 导线、航模定向,汽车指南针,虚拟现实等。
MPU6050九轴姿态融合传感器:3轴加速度、3轴角速度、3轴磁场数据
首款整合三轴陀螺与三轴加速度的新型MEMS传感器,解决了以往组合陀螺仪与加速度传感器组合使用时容易产生轴间差,可通过频率最高至400KHz的IIC端口,以单一的数据流的形式,向应用端输出完整的九轴融合演算数据。
** MPU6050**初始化步骤:
- 初始化IIC接口
- 复位MPU
- 设置陀螺仪和加速度传感器的满量程范围
- 设置其他参数<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2316
2316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









