






【转载】STK 特定问题建模(四)北斗导航精度、DOP、可见卫星分析(第一部分)
转载来源:https://blog.youkuaiyun.com/weixin_42695504/article/details/135055470?spm=1001.2014.3001.5502
简介
本篇对卫星导航中的导航精度进行仿真,以北斗三号MEO卫星为例。计算全球任意区域、飞行航迹下的导航定位精度因子DOP(GDOP、PDOP等)以及给定测量精度下的定位精度
建模将从以下几个部分开展:
1、北斗三号卫星星座仿真(这里仅考虑MEO)
2、定义分析区域、剖分网格
3、导航精度分析
最后效果如下:
1、区域内定位精度
2、区域内可见卫星数目
3、区域内PDOP
一、北斗卫星星座仿真
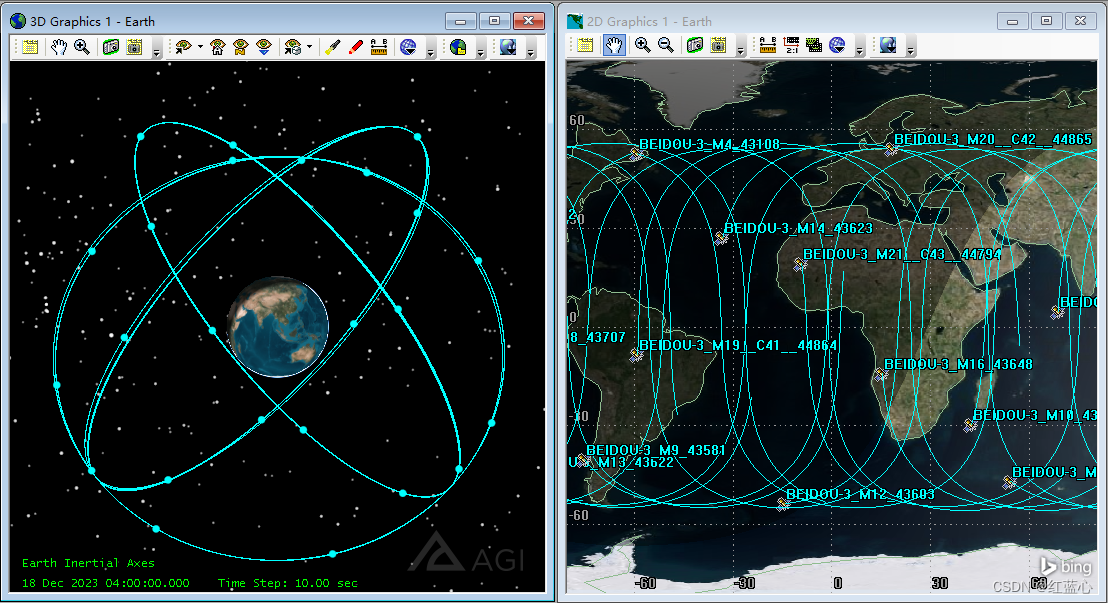
首先创建北斗星座。方式有很多种,一种是利用STK AGI的数据库(需要网络连接),AGI 每天三次更新 TLE 数据库,供在有互联网连接时使用。另一种可以参考上篇北斗卫星创建过程STK 特定问题建模(二)传感器(Sensor)设计(第二部分),从网站上下载GPS星座的TLE文件然后批量导入。本文仍然采用第二种方法。下载北斗卫星TLE文件,导入的时候仅选择BEIDOU-3 MEO卫星:

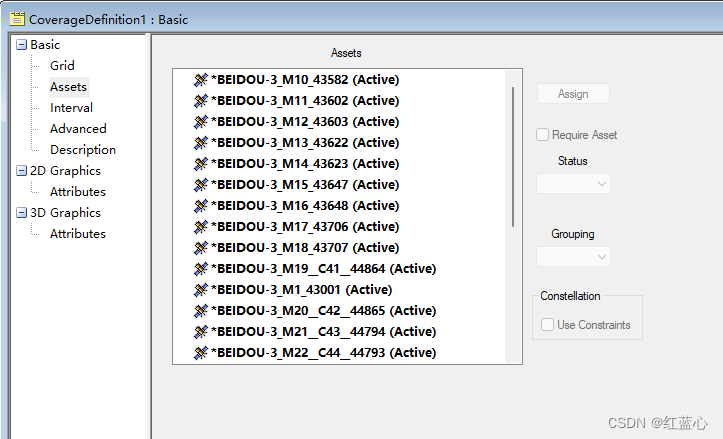
导入MEO共24颗,导入后的卫星星座如下:
二、定义分析区域、剖分网格
(1)选择待分析区域
对特定区域导航精度进行分析,这里以我国大陆陆地为例。STK提供得Area对象可以选中目标区域。点击Insert,插入Area Target对象,选择设置国家方式
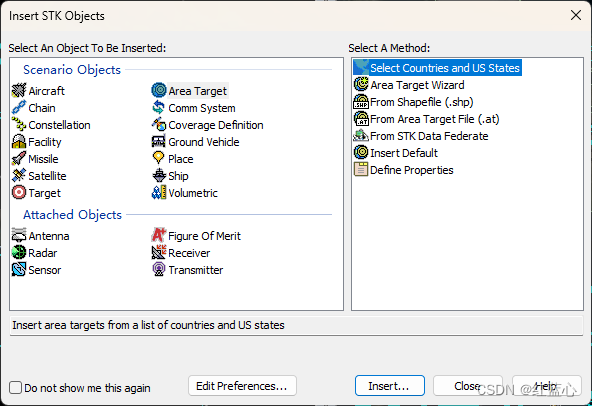
选择All Areas!!!
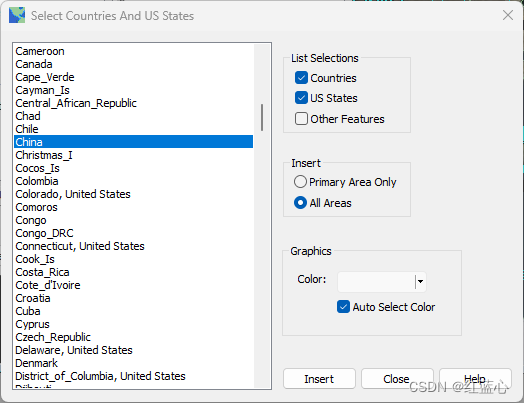
区域选择结果如下
(2)剖分区域网格
相比于依次插入place对一个坐标点的精度进行分析,本篇需要对选中区域的导航精度进行分析,为此,需要剖分覆盖区域网格点(相当于代替我们批量加入地点place)。
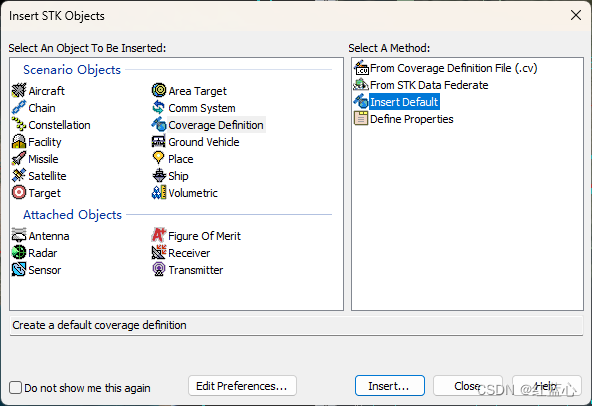
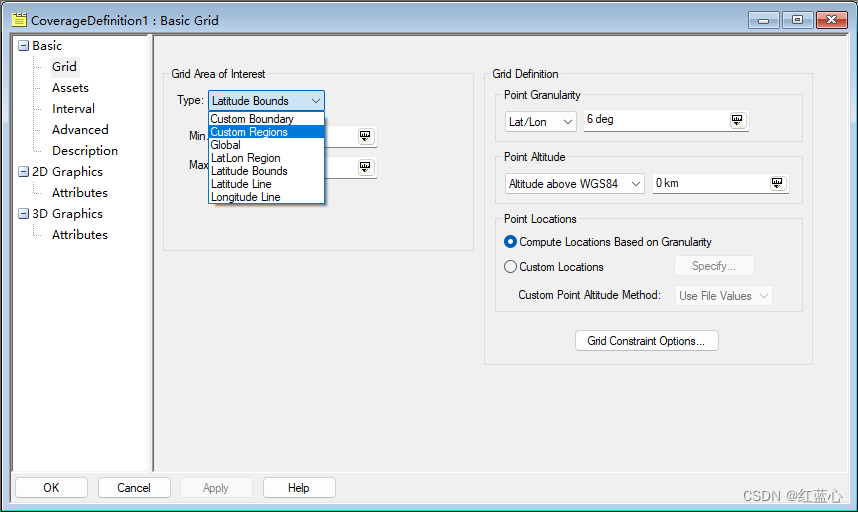
首先定义覆盖区域。可以选择使用特定区域目标的边界来定义覆盖区域的边界,此外也可以选择输入覆盖区域的经纬度边界。这里先以默认方式插入:
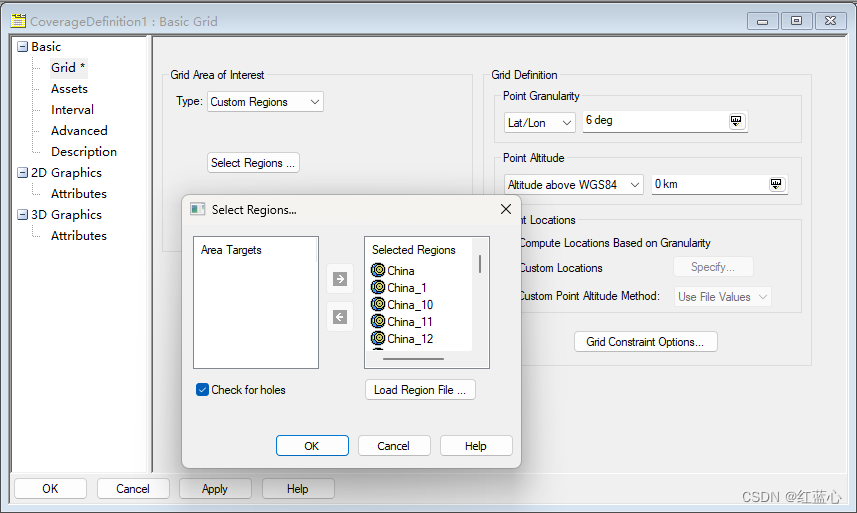
双击打开特性,选择Custom Regons,点击select regons,将刚才创建的所有大陆边界全部移至右边
保存设置。可以在视图中看到已经对选中区域进行了网格划分(白色点即为网格点),后续评估将自动计算所有白色点位置处的导航精度。
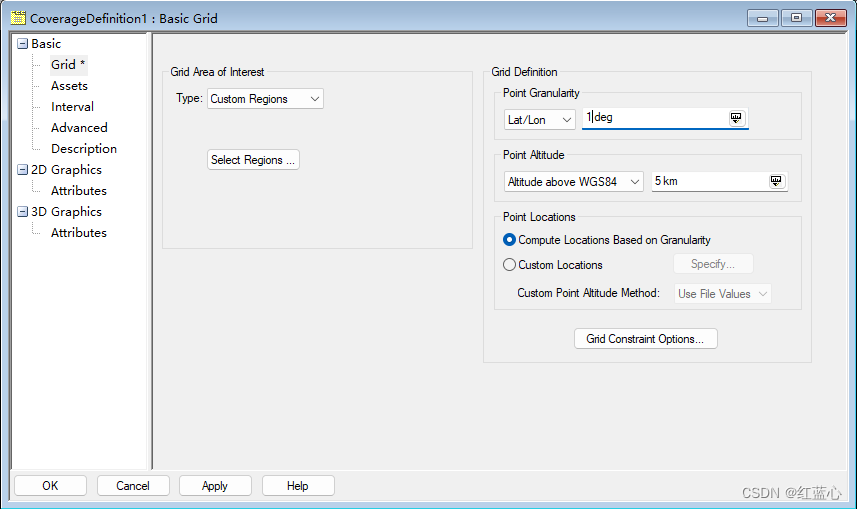
双击打开属性,这里将网格改密集一些(经纬度1.5 deg为间隔),并设置网格点的高度为5km:
三、导航精度分析
(1)计算Access
在Assets中,将所有卫星选中
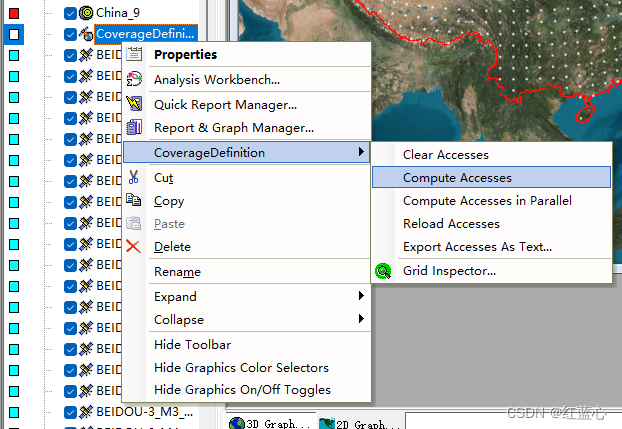
既然已经定义了覆盖定义对象,就可以计算网格中点的卫星可见性了。右键覆盖对象,选择计算可见性
(2)计算导航精度
导航精度是通过接收机接收卫星广播信号,获取单向测量结果定位解算,衡量导航结果的不确定性。如果地面接收机能看到四颗或更多卫星,就能解算出接收机位置以及接收机与北斗卫星间的钟差。
STK中通过Figure of Merit来对覆盖区域特性进行分析。点击Insert,插入一个对象,将其连接在之前创建的覆盖性对象下
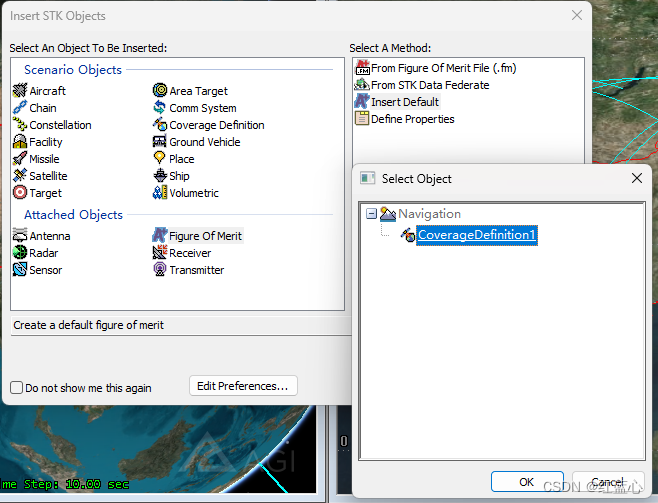 Figure of Merit类型中可以对覆盖区域进行许多特性分析,例如导航精度、精度因子、可见卫星数目等:
Figure of Merit类型中可以对覆盖区域进行许多特性分析,例如导航精度、精度因子、可见卫星数目等:
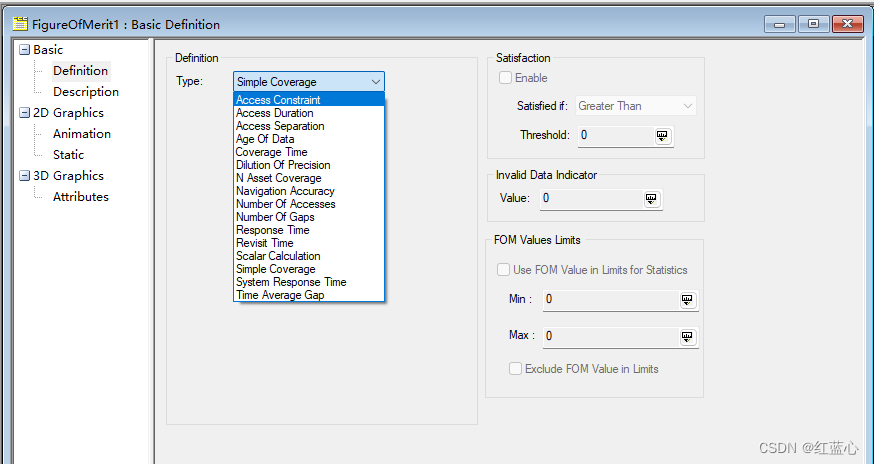
这里选择Navigation accuracy。这里的导航精度同时考虑了几何构型以及测量精度。以经典高斯-牛顿迭代最小二乘进行卫星导航定位解算为例,定位误差方差 = 几何精度因子DOP✖测量方差,STK这里的导航精度即为几何精度因子DOP✖测量方差,其中假设不同卫星测量误差不相关。
在Navigation accuracy下,有多种计算指标(Method):
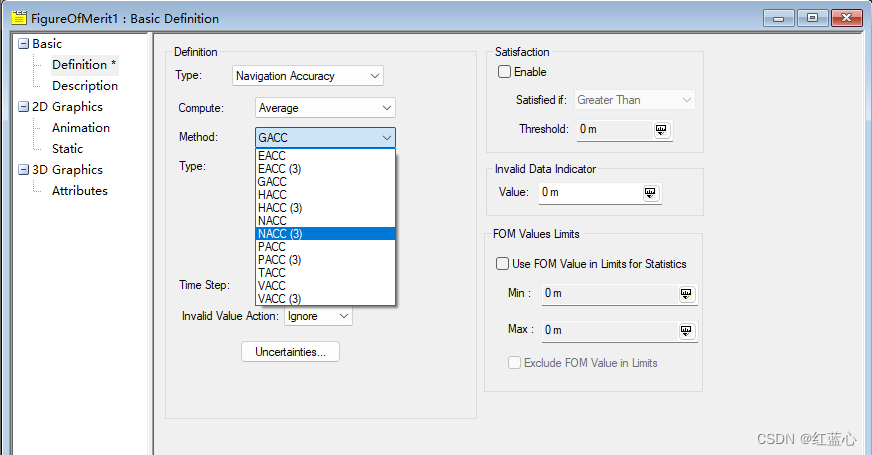
各种方法解释如下:
| Method | 解释 |
|---|---|
| GACC (Geometric Accuracy) | 评估整个导航解决方案的精度。GACC 综合了导航解决方案中位置和时钟相关部分的精度(定位误差+授时误差)。 |
| PACC/PACC (3) (Position Accuracy) | 仅评估与导航解决方案定位部分相关的精度。 |
| HACC/HACC (3) (Horizontal Accuracy) | 评估导航解决方案定位部分的水平(纬度/经度)精度。 |
| VACC/VACC (3) (Vertical Accuracy) | 评估导航解决方案定位部分的垂直(高度)精度。 |
| EACC/EACC (3)* (East Accuracy) | 评估导航解决方案定位部分的东向精度。 |
| NACC/NACC (3)* (North Accuracy) | 评估导航解决方案定位部分的北向精度。 |
| TACC (Time Accuracy) | 评估授时精度。 |
除了选择计算指标外,还可以选择计算方式;
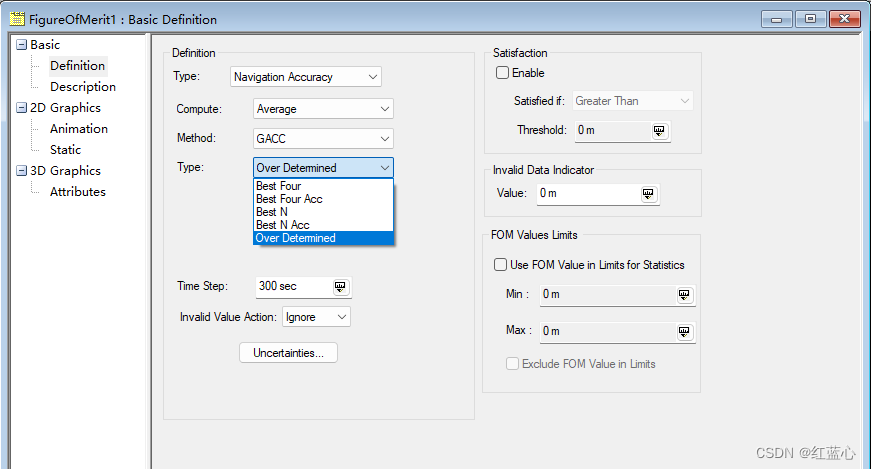
不同计算方式解释如下:
| Type | 解释 |
|---|---|
| Over Determined | 根据当前所有可用卫星计算 NavAcc。如果选择此方法,则需要在导航解决方案中至少包含三个卫星。如果只根据三个卫星计算导航精度,则可用计算指标为: PACC、HACC 和 VACC。此外,请注意,使用三个卫星计算导航精度时,假定时间不存在不确定性(接收机时间与卫星完全同步,这时解算未知数为X Y Z位置,不包含钟差,即使用三颗卫星可以定位)。 |
| Best Four | 根据产生最小 GACC 的四颗卫星集计算 NavAcc。 |
| Best N | 根据指定的卫星数计算 NavAcc,以获得最小 GACC。如果选择此方法,还需要指定卫星数目N 。 |
| Best Four Acc | 根据产生最小几何不确定性(DOP)的四颗卫星的集合计算 NavAcc。 |
| Best N Acc | 指定卫星数目N下,选择最小几何不确定性(DOP)的卫星集计算 NavAcc。 |
这里选择PACC,Over Determined。由此完成了计算可见性需要的步骤。点击Uncertainties,设置测距误差为0.5m(伪距)。设置完成后点击保存。
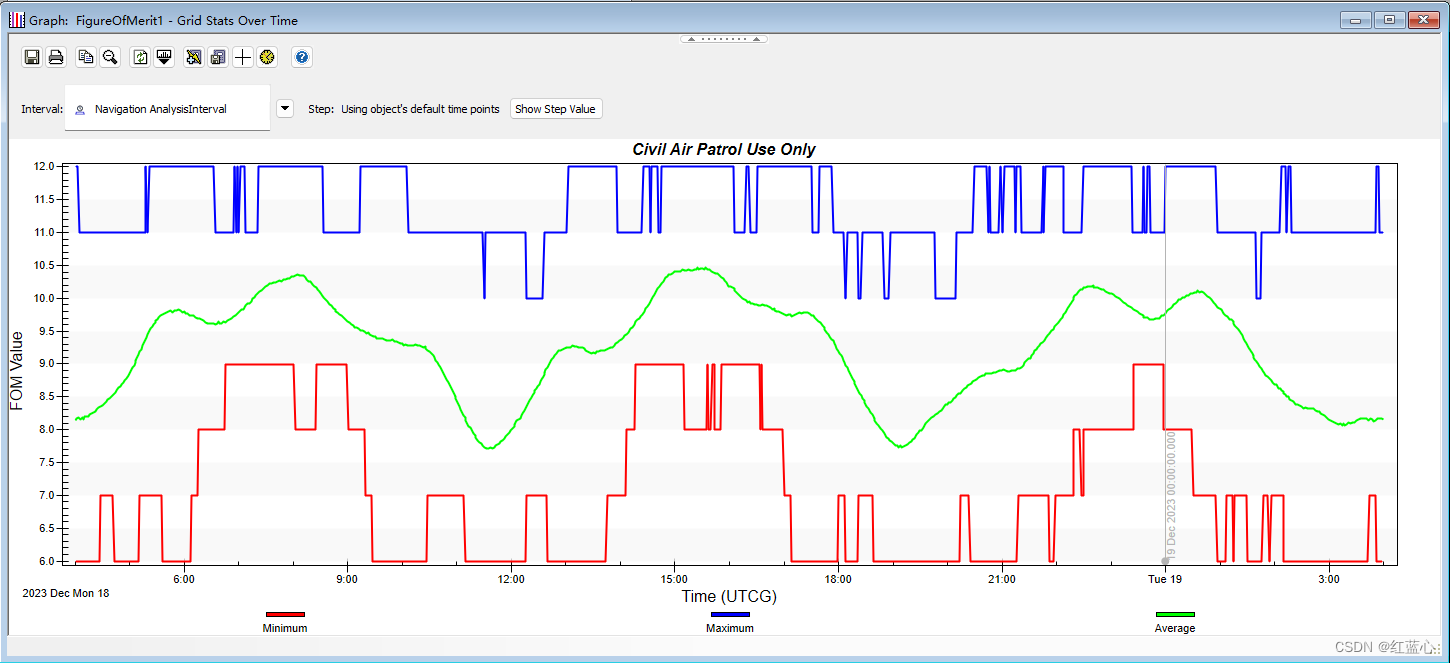
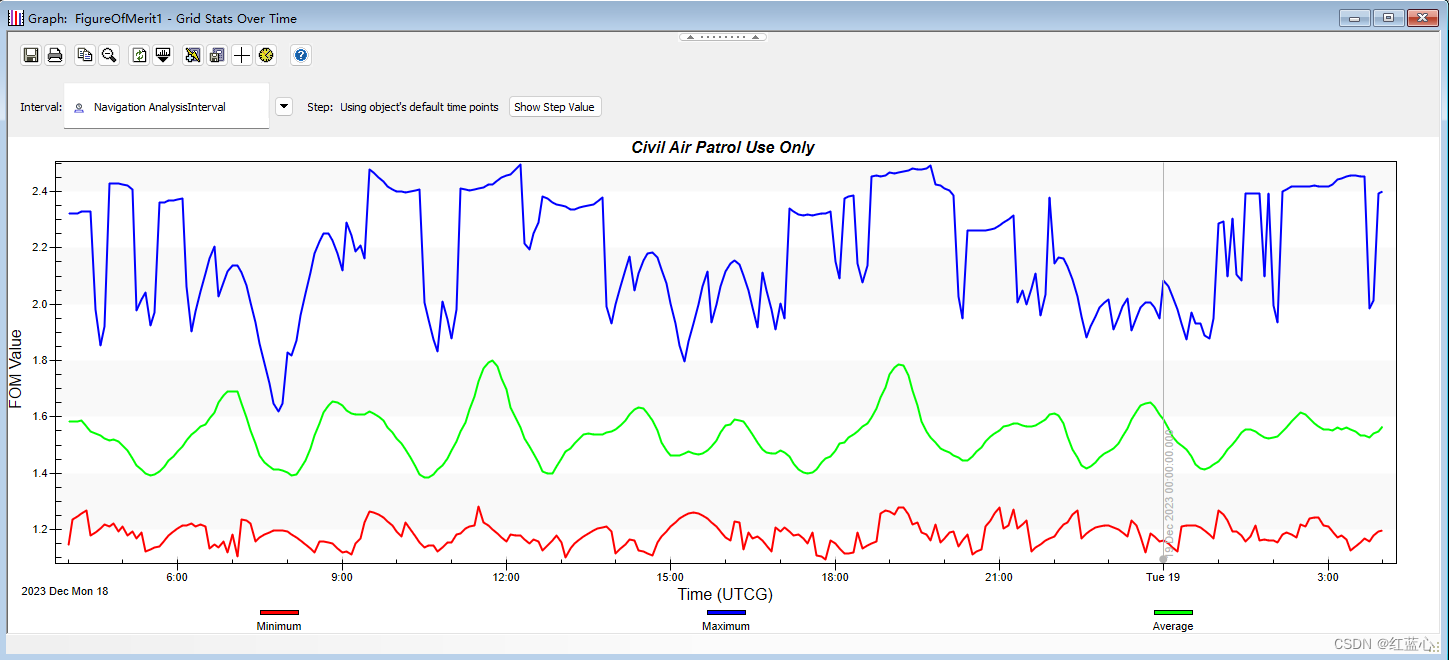
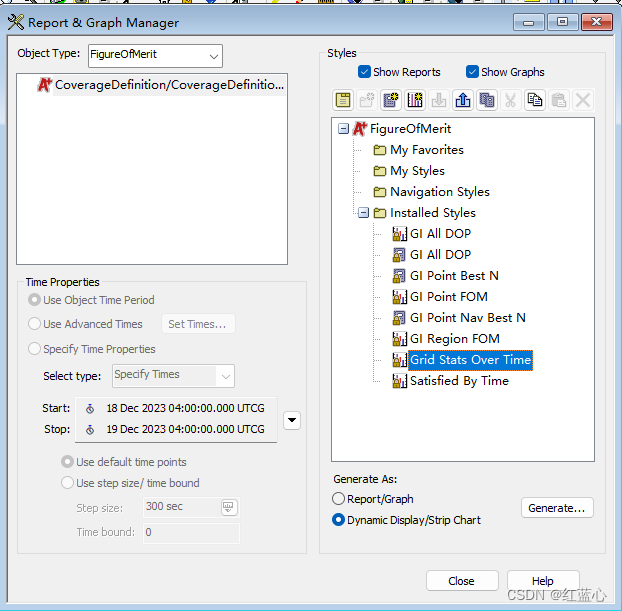
接下来右键选择报告,为了能够在视图中动态显示导航精度随时间变化情况,这里首先选择Grid Stats Over Time:
双击打开Figure of merit对象,在2D中设置在视图展示导航精度的颜色,Animation中选择Show contours,设置显示颜色的legend,从5m到12m,间隔为0.5m。点击Apply,生成legend
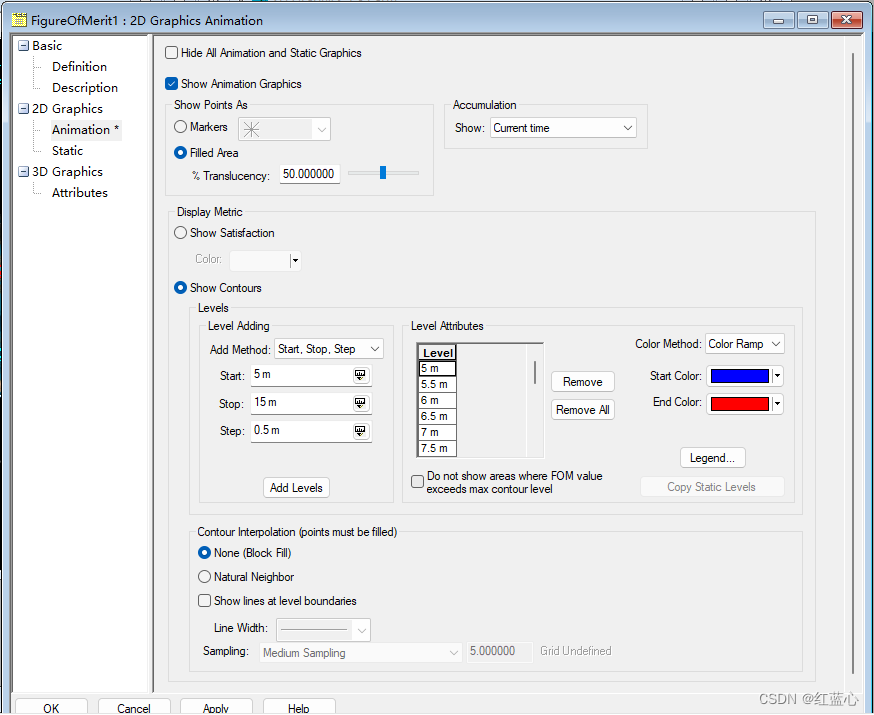
回到视图,已经在地图上显示区域内的导航精度了:
未完待续
更多仿真内容,可以关注公众号“STK建模”查看



















 5079
5079

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









