






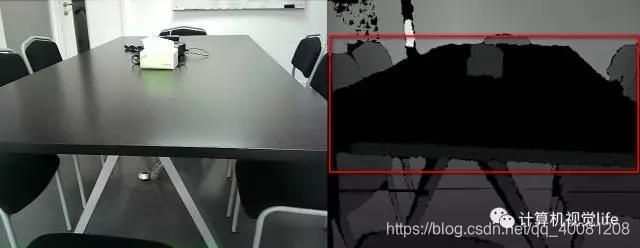
(1)无法对黑色物体精确测距,因为黑色物质可吸收红外线,红外线无法返回,则无法测距。

(2)无法对镜面反射物体精确测距,因为只有当深度相机处在镜面物体的中垂线上时,接收器才可接收到反射的红外线,且会导致过度曝光。
(3)无法对透明物体精确测距,因为红外线可穿过透明物体。

(4)无法对太近的物体精确测距。原理略


(1)无法对黑色物体精确测距,因为黑色物质可吸收红外线,红外线无法返回,则无法测距。
(2)无法对镜面反射物体精确测距,因为只有当深度相机处在镜面物体的中垂线上时,接收器才可接收到反射的红外线,且会导致过度曝光。
(3)无法对透明物体精确测距,因为红外线可穿过透明物体。
(4)无法对太近的物体精确测距。原理略
 1103
1103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























