







 本文介绍了泊车机器人的控制系统设计,包括全向运动控制、导航定位技术和安全避障算法。利用二维码定位模块实现精准定位,轮组角度传感器测量驱动轮角度,超声波避障模块确保机器人安全移动。此外,探讨了不同避障传感器如激光雷达、视觉和超声波传感器的优缺点。
本文介绍了泊车机器人的控制系统设计,包括全向运动控制、导航定位技术和安全避障算法。利用二维码定位模块实现精准定位,轮组角度传感器测量驱动轮角度,超声波避障模块确保机器人安全移动。此外,探讨了不同避障传感器如激光雷达、视觉和超声波传感器的优缺点。
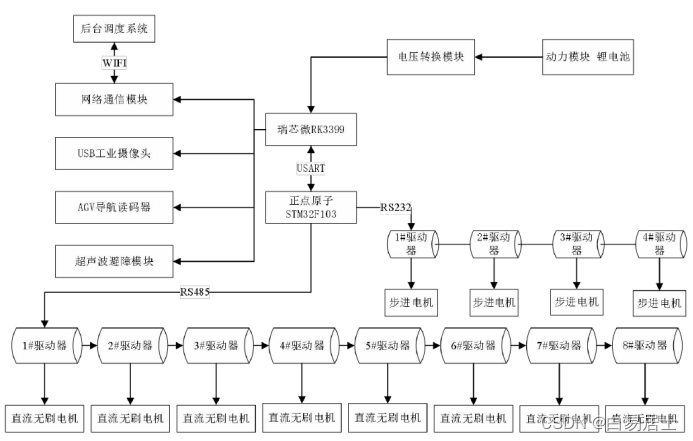
移动机器人当前研究热点问题是全向运动控制、导航定位技术、安全避障算法、路径规划等方向。嵌入式运动控制系统平台设计遵循低耦合、主从式的原则由主控板和驱动板两部分构成,其中主控板负责信号线图像信息采集、图像处理、网络通信等计算较为复杂的部分,驱动板负责协同控制多路行走电机以及同步举升电机等操作。
二维码定位模块
将智能车库内对应位置坐标信息编码写入二维码标签,在机器人行走路径间隔固定距离铺设二维码标签构建智能车库内的二维码栅格地图,泊车机器人移动过程中通过AGV导航读码器捕获到二维码标签图像信息并进行解码操作,处理得到的坐标位置与构建的二维码栅格地图比对实现泊车机器人在智能车库中的精准定位。
轮组角度传感器
轮组角度传感器用来测量驱动轮组相对于泊车机器人车身的角度偏转,实际应用中角度传感器的测量精度、稳定性、初始角度的较准等对于角度测量均有着决定性作用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











