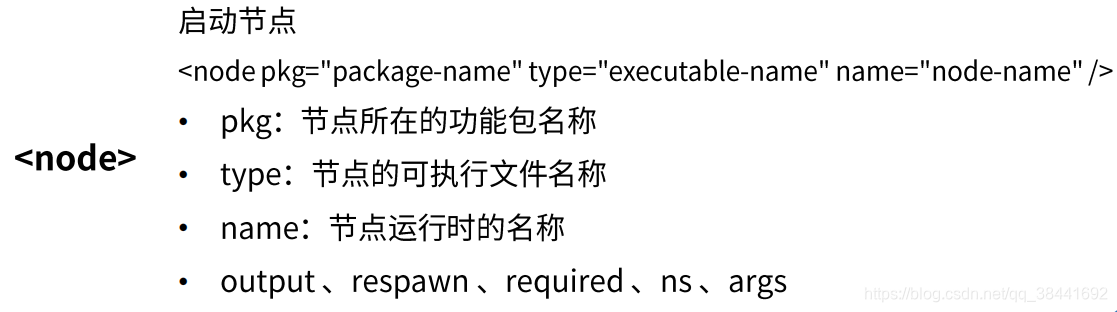
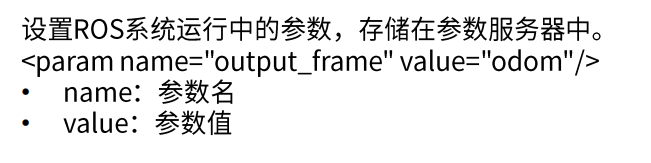
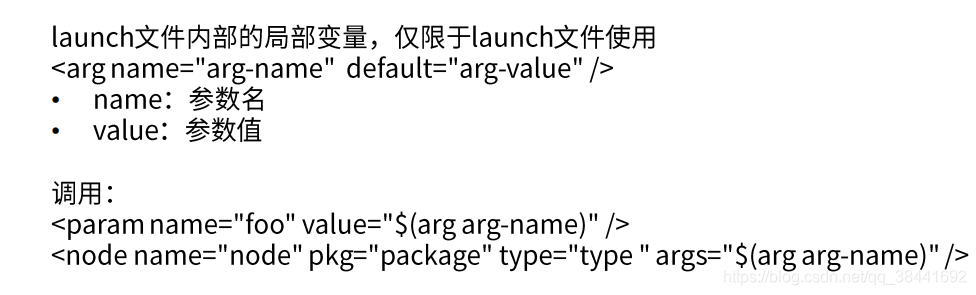
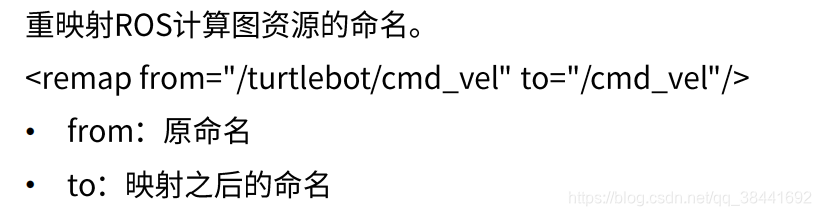
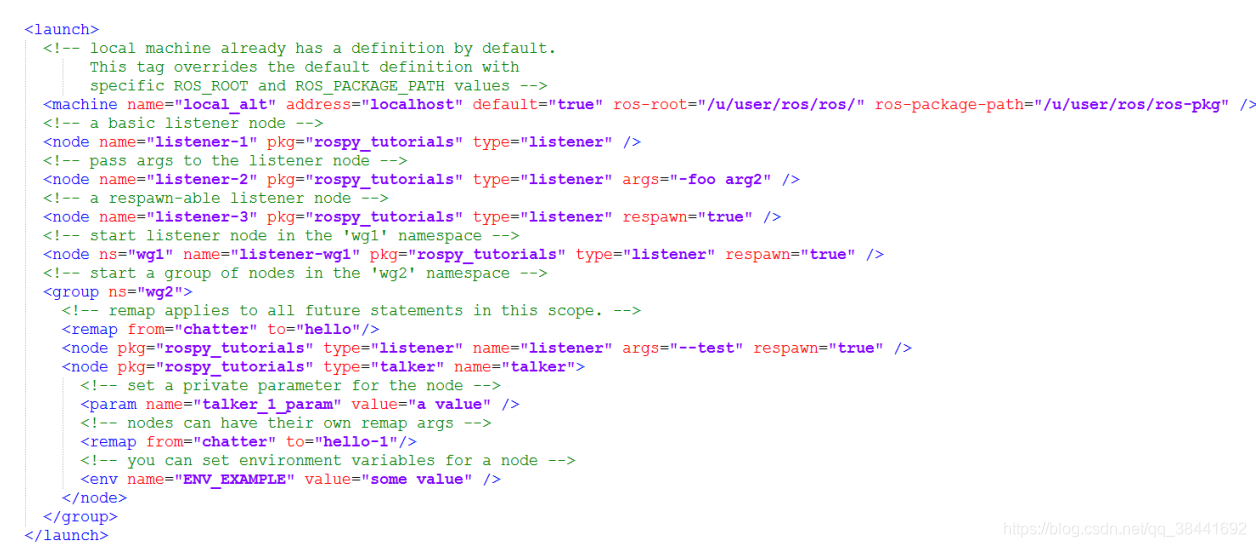
一,为什么需要launch文件 当我们去完成一个机器人时,有很多结点,而且去实现一个功能可能由多个结点去完成,此时我们需要在终端去一个个启动结点,这样效率非常低下,因此提出了launch文件,一次可以启动多个结点 二,相关标签 1,launch 2,node 注意 name属性如果设置的和编程里面的结点名称不一样,此时这里的name会覆盖最开始设置的结点名称 3,param 4,rosparam 5,arg 6,remap 7,include








 本文介绍了ROS中launch文件的作用及使用场景,详细解析了launch文件中的关键标签如launch、node、param等,并阐述了如何通过launch文件高效管理机器人系统的节点。
本文介绍了ROS中launch文件的作用及使用场景,详细解析了launch文件中的关键标签如launch、node、param等,并阐述了如何通过launch文件高效管理机器人系统的节点。




















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






