






 该博客提供ROS安装教程,包括修改Ubuntu的sources.list文件以使用中科大或清华的镜像源,加快下载速度。详细步骤涉及设置ROS源、添加密钥、安装ROS Kinetic桌面完整版或桌面版,并初始化rosdep。遇到更新问题时,可能需要配置代理。
该博客提供ROS安装教程,包括修改Ubuntu的sources.list文件以使用中科大或清华的镜像源,加快下载速度。详细步骤涉及设置ROS源、添加密钥、安装ROS Kinetic桌面完整版或桌面版,并初始化rosdep。遇到更新问题时,可能需要配置代理。
Ros安装教程
参考自:
Ros安装教程
Ros安装教程
修改sources.list为中科大的源,修改之前记得备份。
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
点击左侧所有应用Applications,搜索update,找到Software&Updates,将Ununtu Software下面全部勾选。
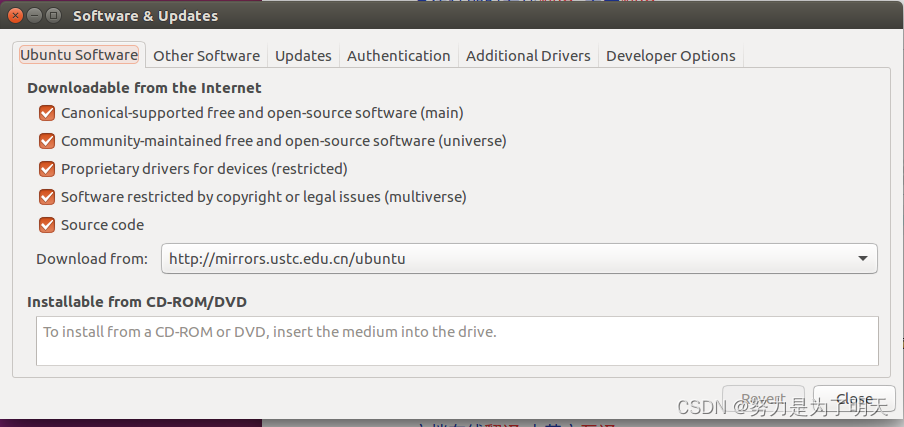
将Download from换位中科大的源(点击other,然后点击Select Best Server,然后找就可了)。
配置Ros
步骤
- 设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
若下载缓慢,选择其他的
中科大:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
清华
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
- 设置秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
若无法连接到密钥服务器,可以尝试替换上面命令中的 hkp://keyserver.ubuntu.com:80 为 hkp://pgp.mit.edu:80
你也可以使用curl命令替换apt-key命令,这在使用代理服务器的情况下比较有用:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
- 安装
确保最新
sudo apt-get update
桌面完整版: (推荐)
sudo apt-get install ros-kinetic-desktop-full
桌面版安装
sudo apt-get install ros-kinetic-desktop
要查找可用软件包,请运行:
apt-cache search ros-kinetic
- 初始化 rosdep
sudo rosdep init
rosdep update
如果Update失败
你需要开代理去设置获取,我改了resolv.conf为谷歌nameserver也没有用,建议值有条件的直接开代理。

















 6792
6792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









