




一、ubuntu22.04下载ROS2
设置locale 首先要确保本地语言支持UTF-8
1 sudo apt update && sudo apt install locales
2 sudo locale-gen en_US en_US.UTF-8
3 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
4 export LANG=en_US.UTF-8
设置源
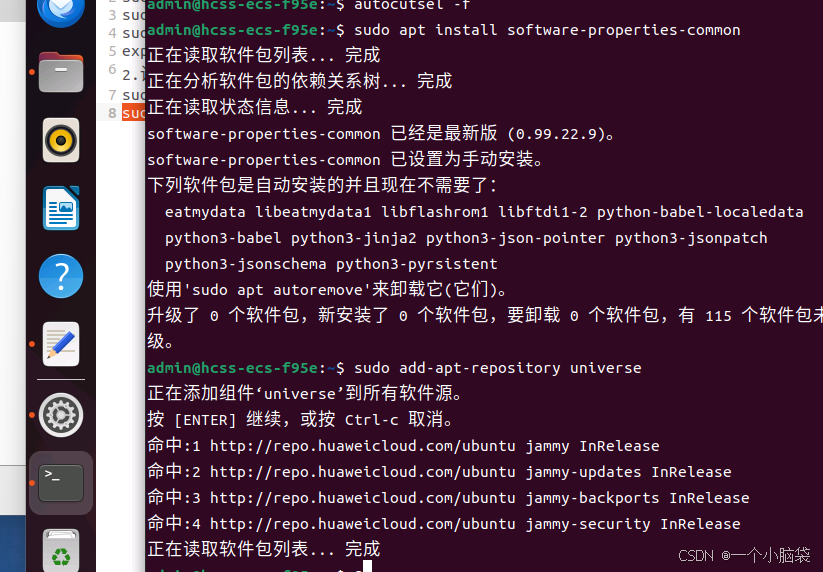
1 sudo apt install software-properties-common
2 sudo add-apt-repository universe
然后按回车:
添加ROS2密钥
1 sudo apt update && sudo apt install curl -y
2 sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
添加软件源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装ROS
1 sudo apt update && sudo apt upgrade
2 sudo apt install ros-humble-desktop
安装其他ROS工具
sudo apt install ros-dev-tools
配置rosdep(可选)
rosdep是 ROS2中的一个命令行工具,主要用于自动安装和管理软件包的系统依赖项,它帮助开发者避免手动安装各种库和依赖包。暂时不配置也不会影响ROS2的使用。
开始配置
sudo rosdep init
注意:如果在安装时报错“rosdep找不到命令”,需先安装python3-rosdep
sudo apt-get install python3-rosdep
配置环境
1 echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
2 source ~/.bashrc
配置环境生效后,可在目录下的.bashrc文件中看到ROS环境
grep "humble" ~/.bashrc
测试 分别在两个终端中,输入如下命令:
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
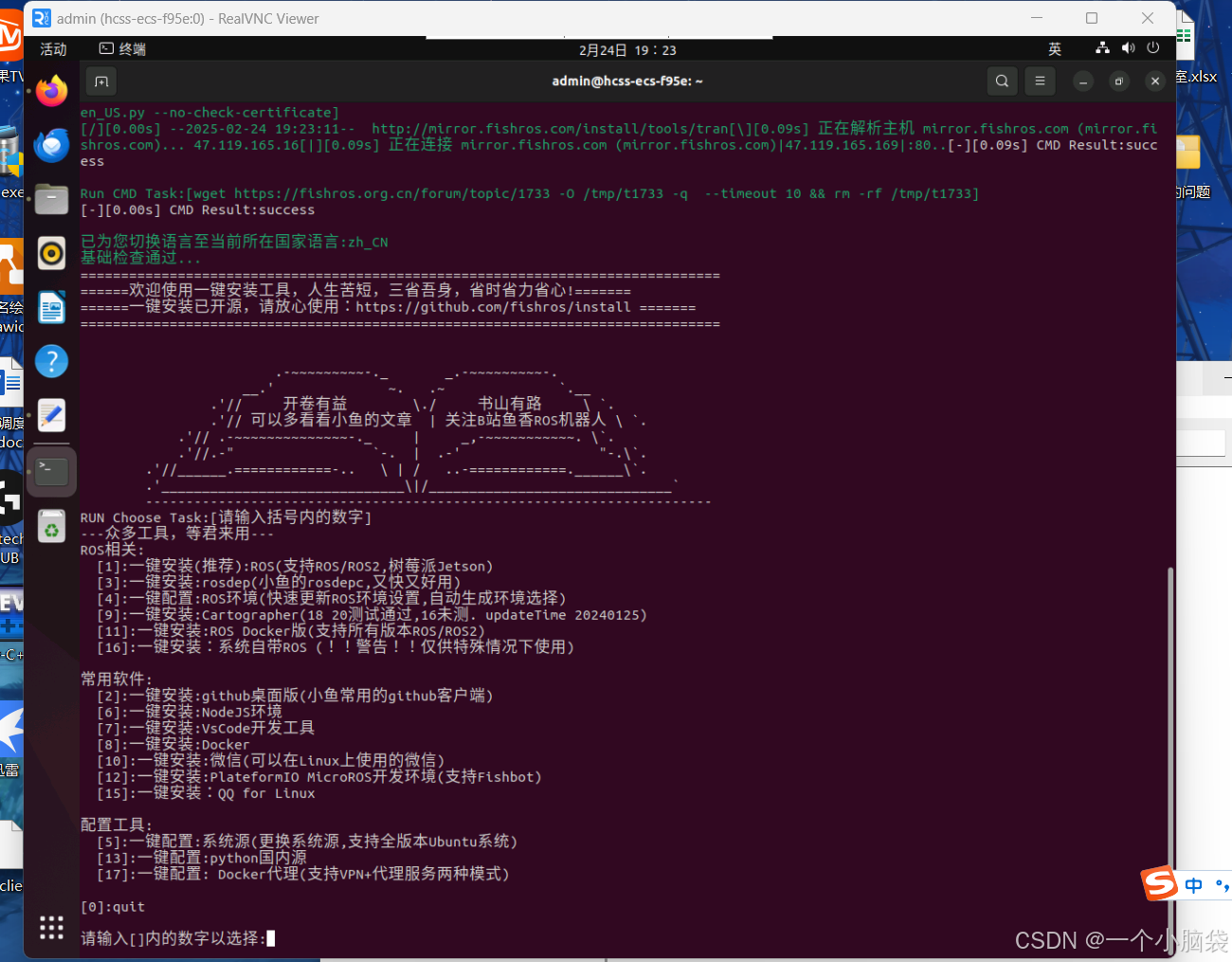
如果以上的内容执行完毕后,ros2还是没有安装下来,我推荐用小鱼的一件安装ros程序:
ros一键安装工具

在命令行输入指令:
安装ros开发工具
sudo apt update
一键安装指令
wget http://fishros.com/install -O fishros && . fishros
然后根据要求选择合适的版本
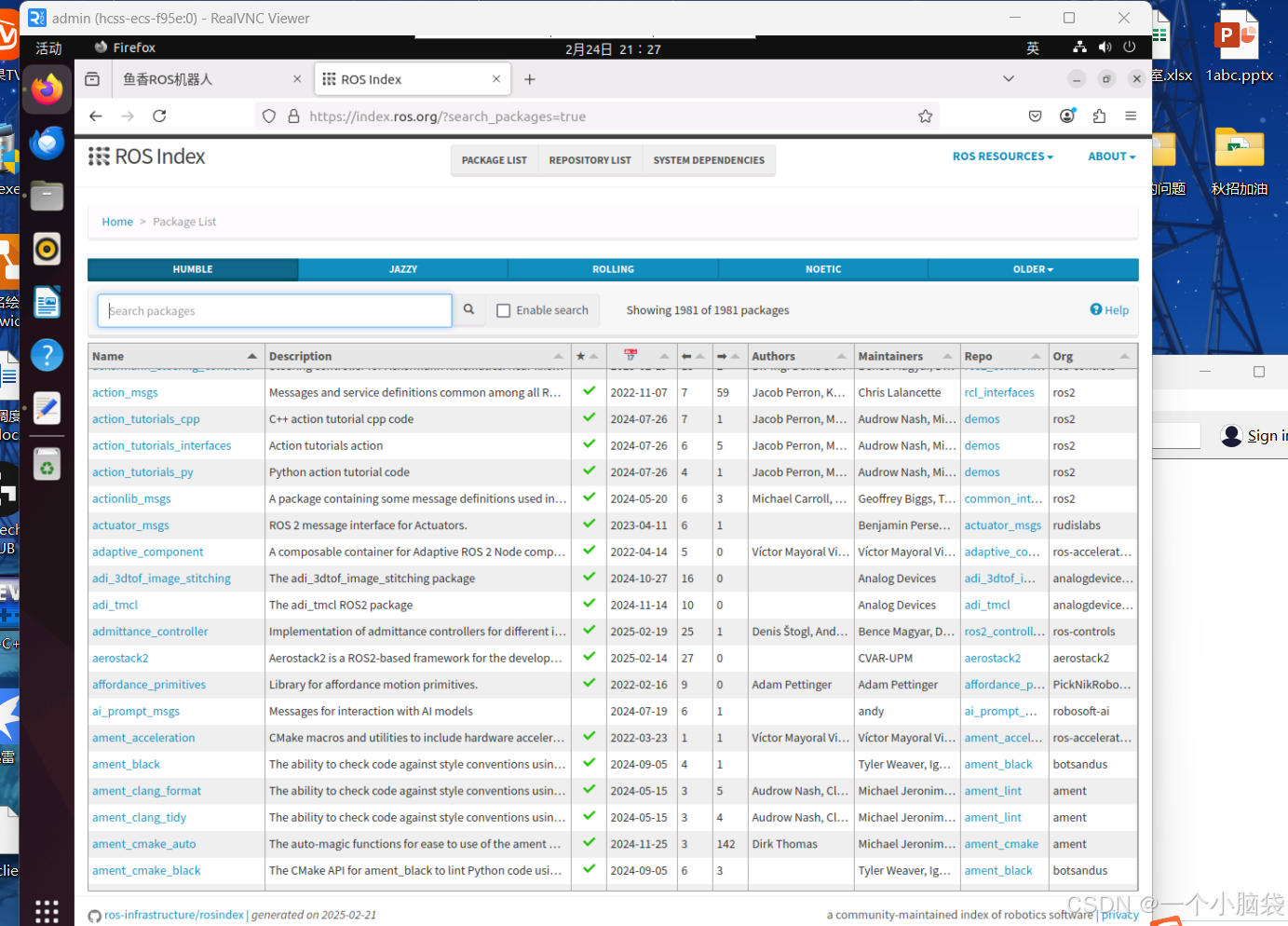
二、使用应用商城的软件
然后我们就可以开心的逛APT了
应用软件商城
点击
小乌龟测试学习案例:
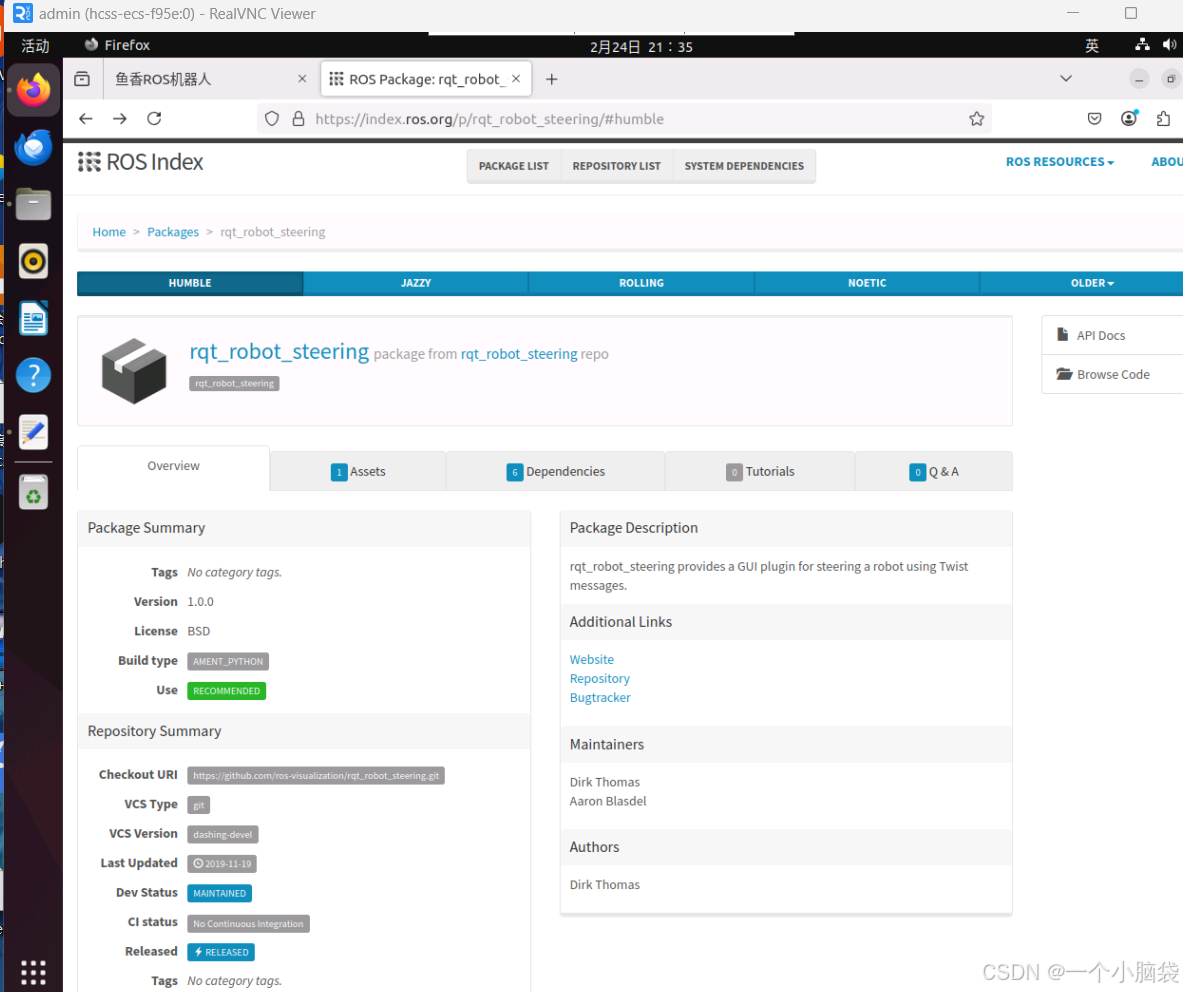
点击Website进入软件细节介绍界面
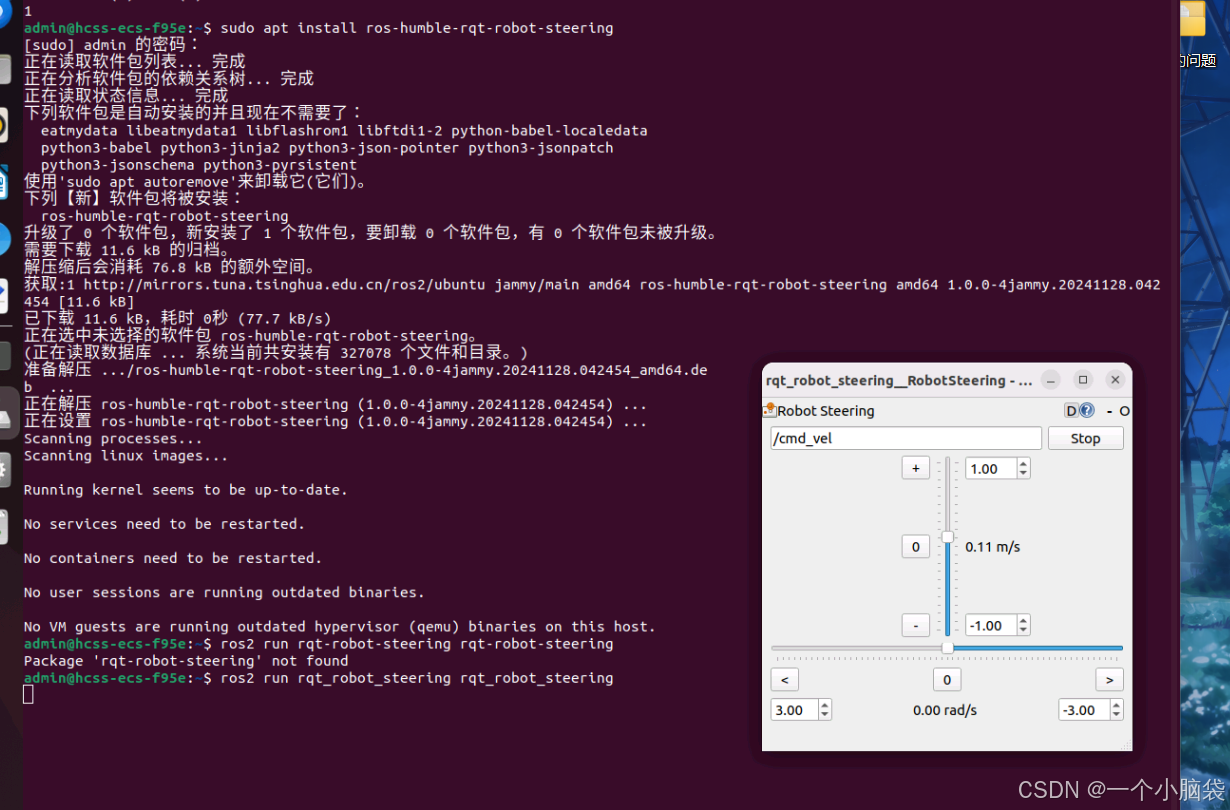
安装乌龟控件:
sudo apt install ros-humble-rqt-robot-steering
ros2 run rqt_robot_steering rqt_robot_steering
安装乌龟:
sudo apt install ros-humble-rqt-turtlesim
ros2 run turtlesim turtlesim_node
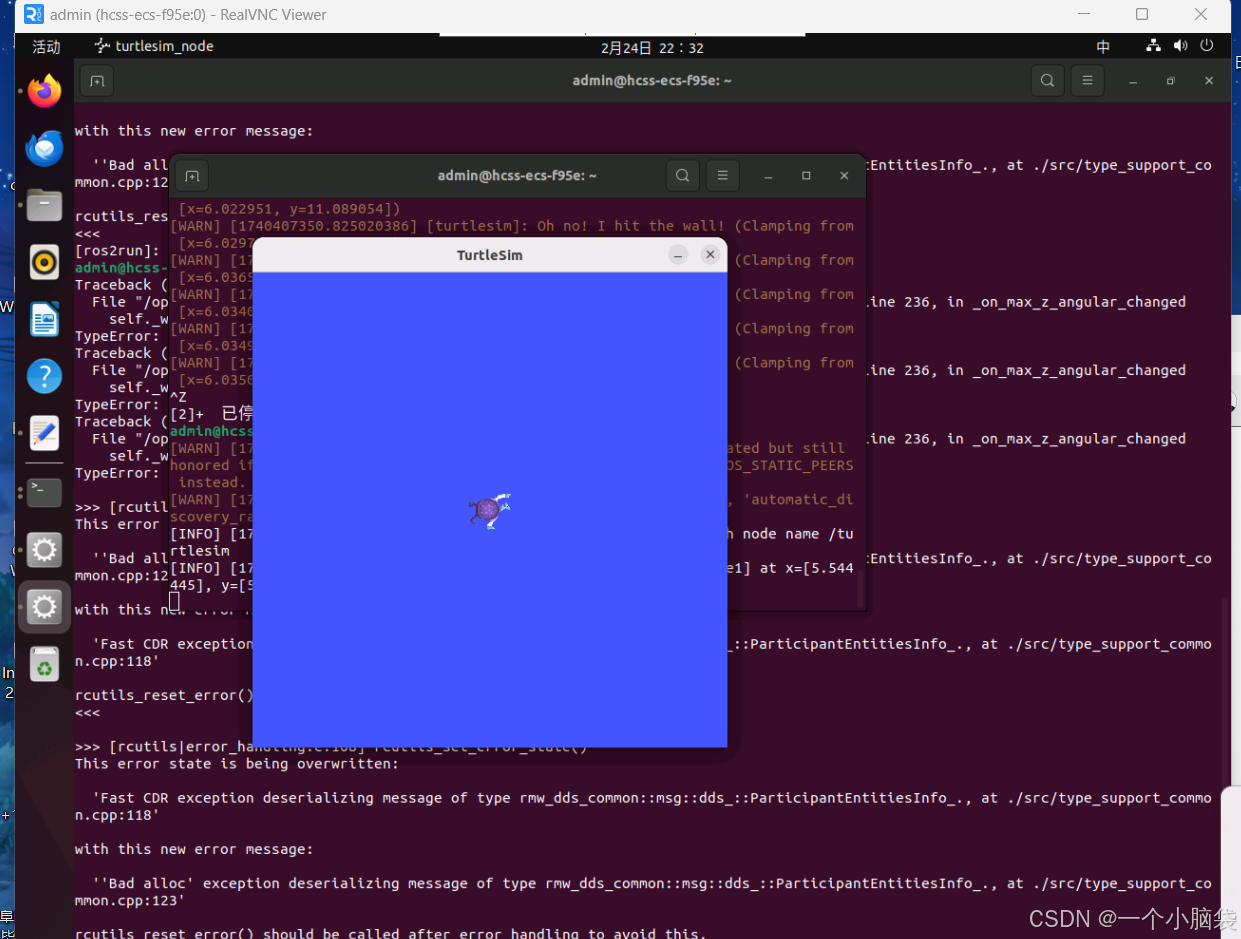
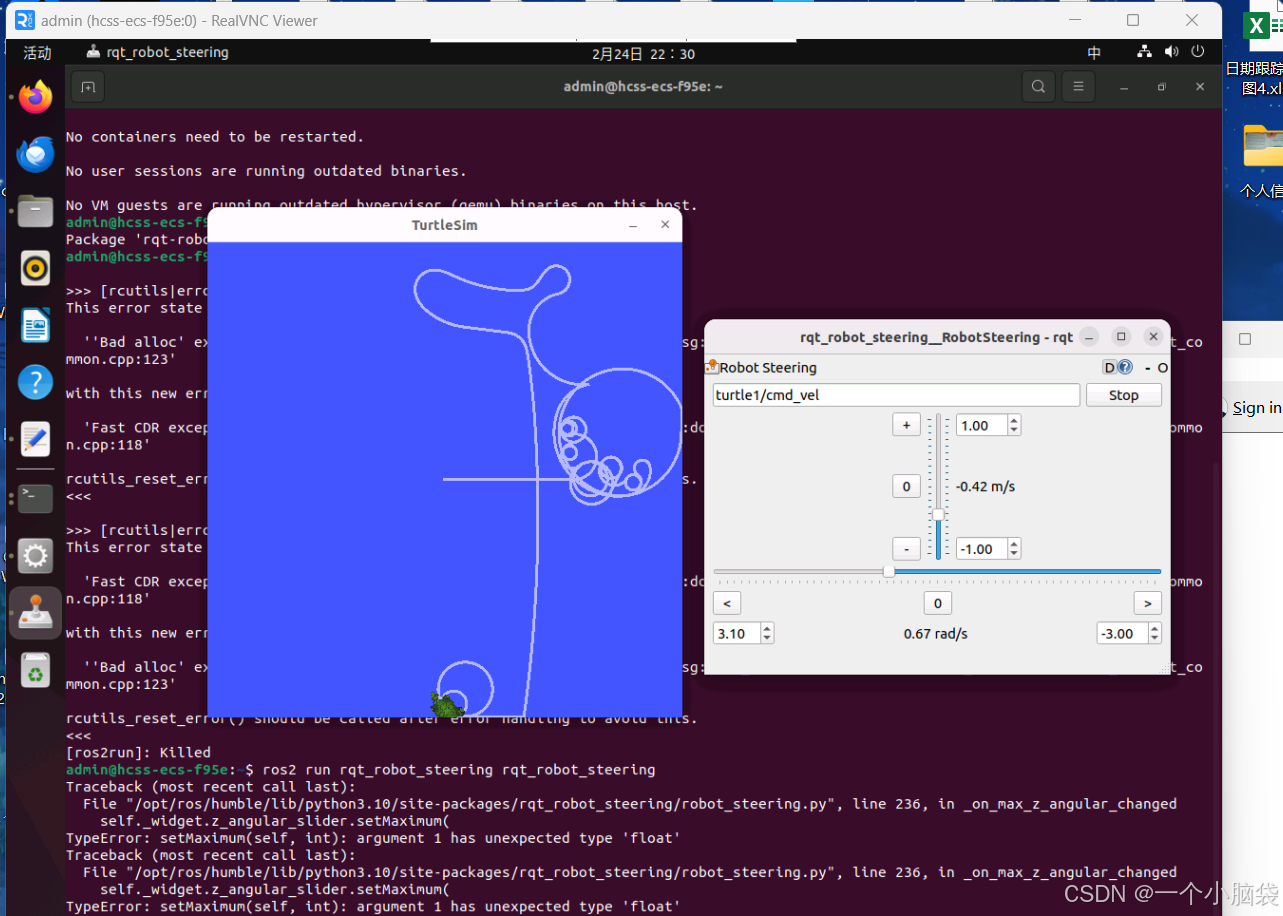
结果预览:
注意:turtle1/cmd_cel
三、linux(VNC控制)和windos文本复制粘贴问题
下载工具autocutsel
sudo apt install autocutsel
如果想在后台运行该工具
$ autocutsel -f
然后就完美解决两边系统相互复制粘贴问题了。

















 4816
4816

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









