







 本文档通过一个简单的例子介绍了如何在Prescan中进行路径规划。首先新建Prescan文件并添加straigh Road,接着放置车辆并设定手动路径定义。详细步骤包括自定义车辆轨迹、配置对象、设置轨迹起点,最后编译、连接并使用Matlab观察车辆沿预设轨迹行驶的效果。这个教程适合初学者,旨在帮助理解Prescan的轨迹规划功能。
本文档通过一个简单的例子介绍了如何在Prescan中进行路径规划。首先新建Prescan文件并添加straigh Road,接着放置车辆并设定手动路径定义。详细步骤包括自定义车辆轨迹、配置对象、设置轨迹起点,最后编译、连接并使用Matlab观察车辆沿预设轨迹行驶的效果。这个教程适合初学者,旨在帮助理解Prescan的轨迹规划功能。
1,新建一个prescan文件
2,拖动straight Road到工作台区域,并使用ctrl左键双击拉长道路

3,拖动一个车辆在道路上。

4,制定车辆行驶的轨迹,点击manual path definition 设置路线轨迹,如下图:

5,自定义设置的轨迹,(注意设置的轨迹从车身开始)我设置的道路轨迹如下图:

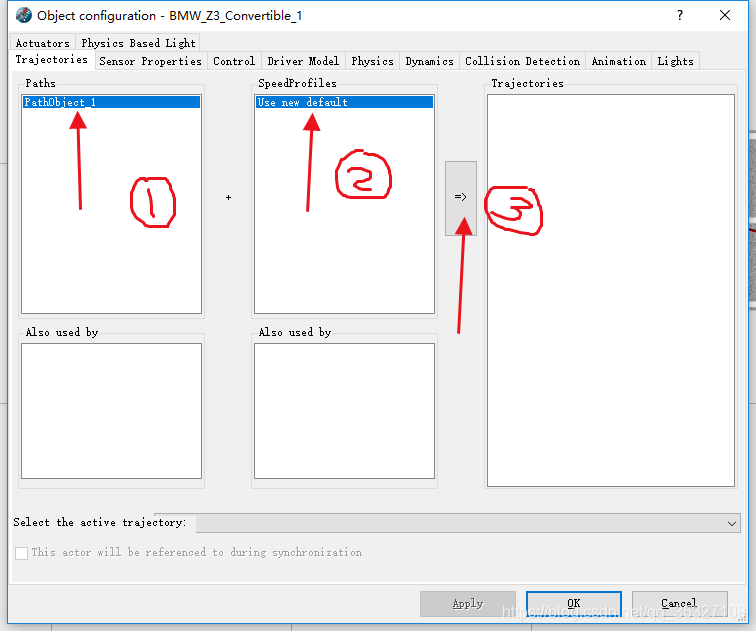
6,把鼠标放置到车辆上面点击右键选择object configuration ,打开如下图:

7,如下图,1,2,3步骤,
8,结果就多了一个轨迹,如下图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















07-13
 1071
1071
1071
01-06
5137
5137
09-04
3081
3081
05-27
1641
1641
02-22

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









