







概述
每个算法都是为了解决一类问题,或者说解决之前的问题所创造出来的,而感知机,在解决一类问题的时候也暴露了很多问题,变相的推动了以后的算法的改进方向。
知识树
苹果表示相对重要的
直观介绍
现在有一盘红豆和绿豆,怎么把红豆和绿豆分开来
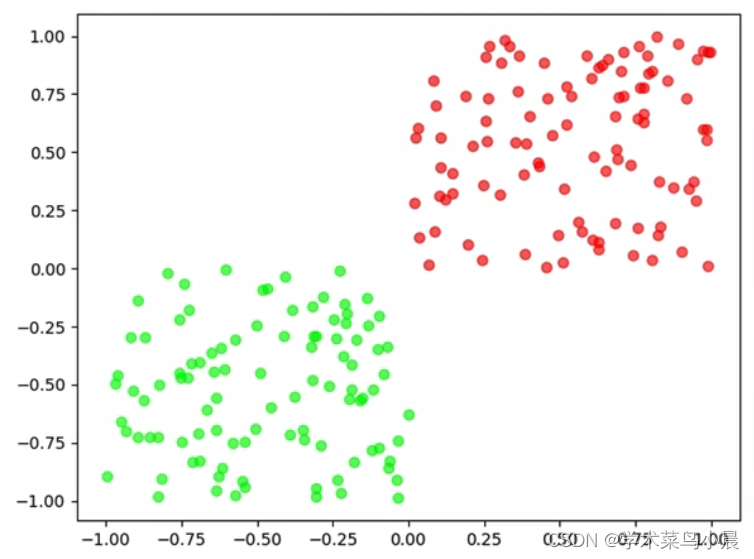
当红豆和绿豆放在一起时,它们却能自己分开来,为什么呢?
我们怎么区分呢,假设我们随意花如下的线
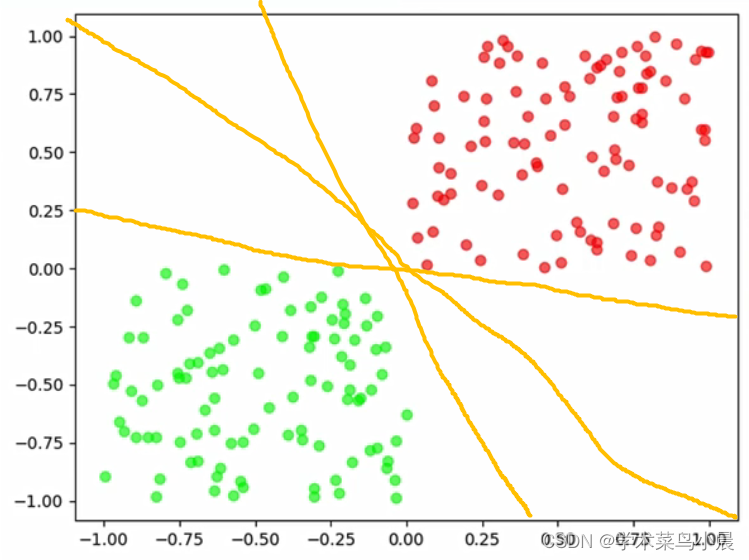
这样是不是就完美的区分开来了,完美解决。
那么程序怎么知道x和y都大于0的豆是红豆呢?
或者说,它是怎么学会这个规则的?
那是不是只要一条直线不分错一个点,或者说尽可能的少分错点,那就是一条好的直线。
即:我们把所有分错的点和直线的距离的和(蓝色示例),求和的距离最小表示这条直线越好,因为这表示这条线分错的最少。
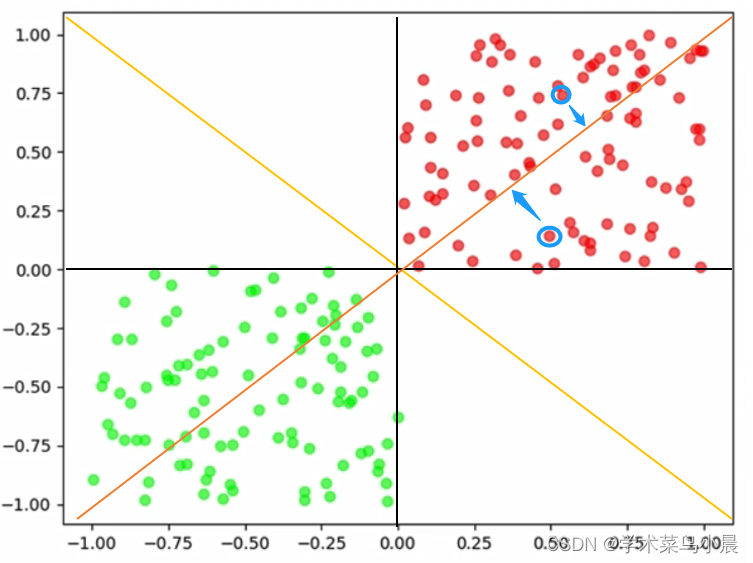
如图中红色线的和的距离肯定比黑色或者黄色的线大。
总结
-
一条直线不分错一个点,这就是好的直线。
-
模型要尽可能找到好的直线。
-
如果没有好的直线,在差的直线中找到好的直线。
-
判断直线多差的方式:分错的点到直线的距离求和。
感知机模型
Perceptron
确定终究目标
f(x)
我们希望一个函数,如f(x),进来一个豆,它告诉我们是红豆还是绿豆
f(x) = sign(w * x + b)
sign如图:
把w * x + b 比作x,相当于给了一个“豆”进来,就只得到两个结果,也就是红豆(+1)或者绿豆(-1)。那么w * x + b 是什么?
w * x + b是超平面
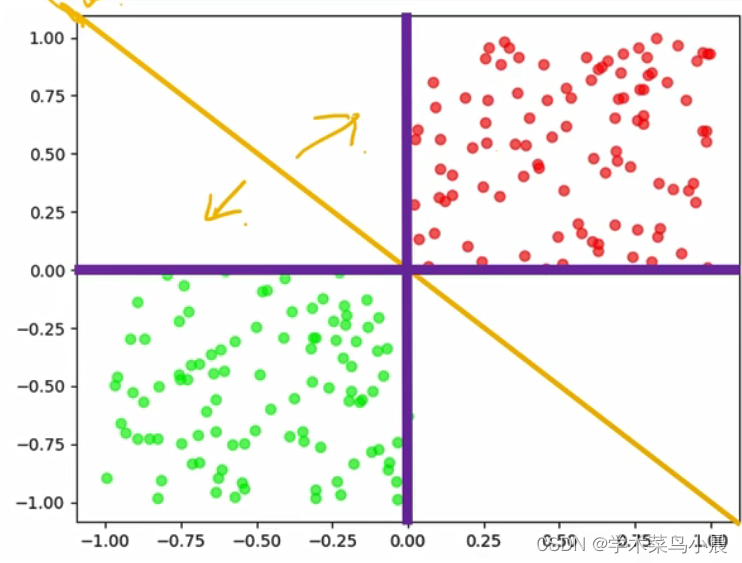
即那条黄色的分割线,且当豆在线的上面,就是红豆,在下面是绿豆。
超平面是n维欧氏空间中余维度等于一的线性子空间,也就是必须是(n-1)维度。即如果是2维,超平面就是1维,如果是3维,超平面就是2维。
w * x + b分别代表什么
w是权重,x是特征的实际值,b是偏值
比如知道豆的直径,如x1表示某个豆的直径 = w1 * x1 + b1,大于1则是红豆,小于则是绿豆
有时候一个特征不一定能区分开来,可能还需要质量,(x1,x2)计算 = (w1, w2) * (x1, x2)
亦或者还有豆的光滑度,则有x1, x2, x3 ,这样就变成3维了。
正式的说
w * x + b 是一个n维空间中的超平面S,其中w是超平面的法向量,b是超平面的截距,这个超平面将特征空间划分成两部分,位于两部分的点分别被分为正负两类。所以,超平面S称为分离超平面。
特征空间也就是整个n维空间,样本的每个属性都叫一个特征,特征空间的意思是在这个空间中可以找到样本所有的属性的组合。
感知觉的学习策略
Learning policy
求空间中任意一个点X0到超平面S的距离
函数间隔与几何间隔
函数间距:
缺点:已知wx + b = 0,当不等于0时(比如1),那如果等比例放大缩小w和b是不是就更小,等同于1/2 (wx + b) = 1/2(wx) + 1/2(b) = 1/2,超平面是没有动的,但是结果却缩小了,那么模型就觉得它知道等比例缩小就能得到更小的结果。
这时候就引入几何间距
几何间距:

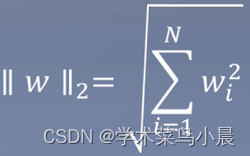
加入了二范式,相当于有了一个度量的标准,即等比例缩小w时,外面的w也会等比例变化。
通俗来讲,函数间距是将你去吃饭的那段路本来要1000m,它改成1km,1就小于1000了,而几何间距就杜绝这种情况,只能都是m或者km
对于误分类数据而已,

yi表示真实是+1还是-1
w*xi+b表示预测的结果
绿豆预测成绿豆:预测结果w*xi+b < 0(绿豆),且真实为绿豆(-1)时,则- * -1(wxi + b) < 0。
绿豆预测成红豆:w*xi+b > 0,真实为绿豆-1,则- * -1 (wxi + b) > 0。
也就是说只要分错,那么数据一定是大于0
误分类点xi到超平面S的距离为:

因此,所有误分类点到超平面S的总距离为:
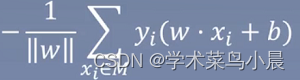
M:误分类点的集合
感知觉的学习策略——原始形式
Learning policy
-
任选一个超平面w0,b0
随机初始化,如w0 = 1,可能有多个维度,如x0,x1,x2,那么w也会有w0,w1,w2的随机初始化
-
采用梯度下降法极小化目标函数
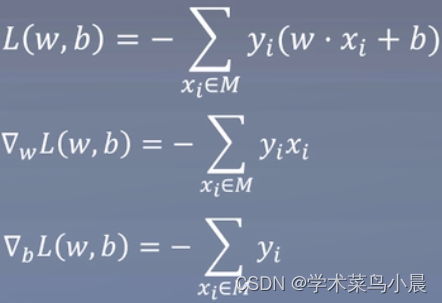
L:loss
这时候用的还是函数间隔,因为感知机的超平面的目标是不分错任何一个点。所以不存在说要某个点到超平面的距离无限的小。
也可以用几何间隔,但是会增加计算量,没有必要,但后面基本都是用几何间隔。
侧面反映了感知机只能在线性可分的数据集上使用,也就是线性模型。
-
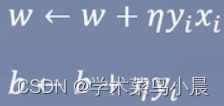
更新w,b
例子
Example
训练数据中,正例(y=+1)点位x1 = (3,3)T,x2 = (4,3)T,负例(y=-1)为x3 = (1, 1)T,求解感知机模型f(x) = sign(w*x + b),其中w = (w1, w2)T,x = (x1, x2)T
解:
-
构造损失函数

-
梯度下降求解w,b。设步长为1
-
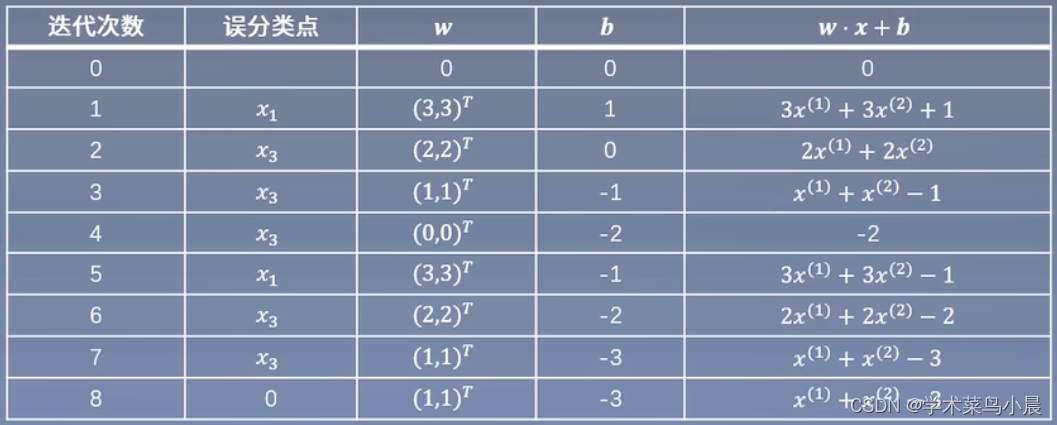
取初值w0 = 0,b0 = 0
-
对于x1,y1(w0 * x1 + b0) = 0未被正确分类,更新w,b。w1 = w0 + x1y1 = (3,3)T,b1 = b0 + y1 = 1 => w1 * x + b1 = 3x + 3x + 1
-
-
对x1,x2,显然yi(w1 * xi + b1) > 0,被正确分类,不做修改。对于x3,y3(w1 * x3 + b1) 应该小于0,结果是大于0被误分类,更新w,b。

-
以此往复,直到没有误分类点,损失函数达到极小。
总结
Summarization
-
感知机通过构造超平面的形式划分不同类的点。
-
感知机属于线性判别模型,因为它的判别边界是线性的。
-
函数间隔和几何间隔的区别
大多时候是用的几何间隔,因为有“度量标准”,而感知机是误分类驱动,目标是不分错任何一个点,即结果为0,所以即使度量标准改变也没用。



















 6369
6369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











