







1. 欧拉角
欧拉角分为静态欧拉角和动态欧拉角;静态欧拉角的参考轴是固定的,动态欧拉角旋转的轴以自身为坐标系进行旋转;动态欧拉角会导致万向锁,大概意思是说沿着x轴(pitch)旋转90°后,旋转y(yaw)和旋转z(roll)的结果是一样的,失去了一个自由度。视频理解,https://www.bilibili.com/video/BV1zF411a7j1/?spm_id_from=333.337.search-card.all.click。
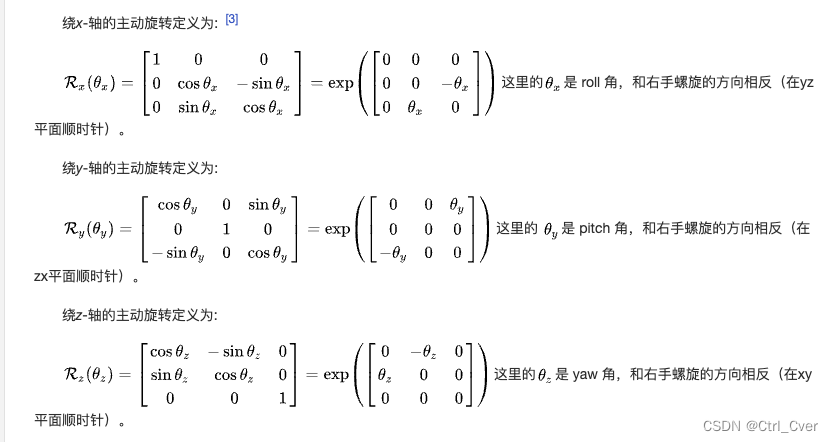
2. 旋转矩阵
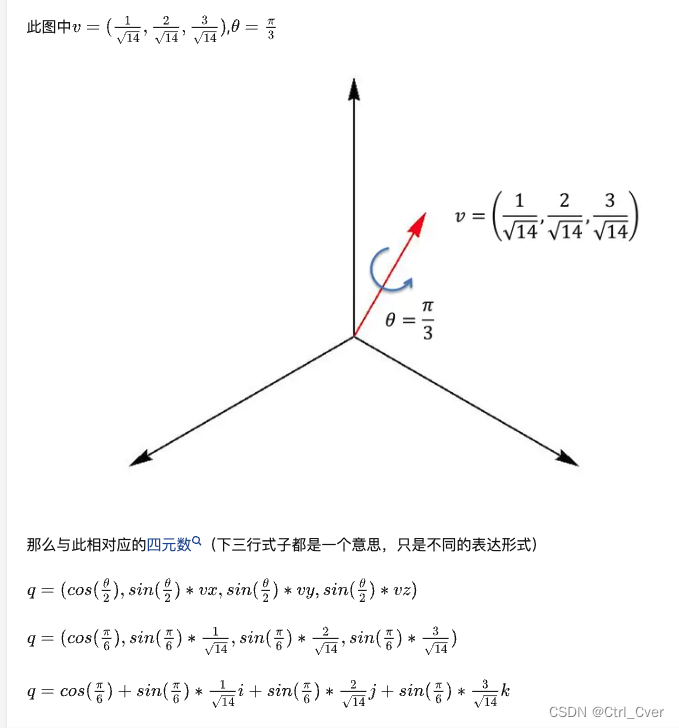
3. 四元数
参考链接: https://www.zhihu.com/question/23005815
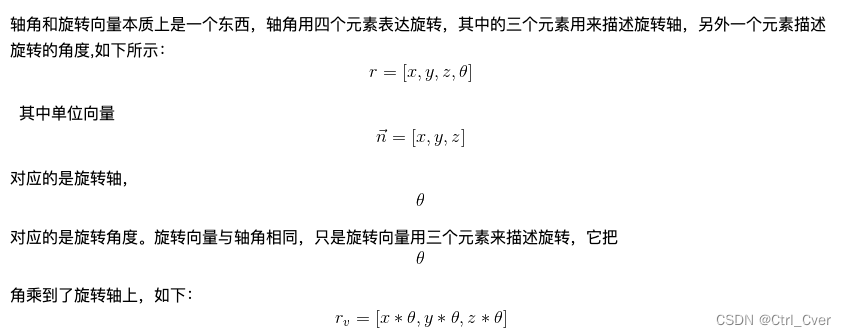
4. 轴角/旋转向量
参考: https://www.guyuehome.com/20289
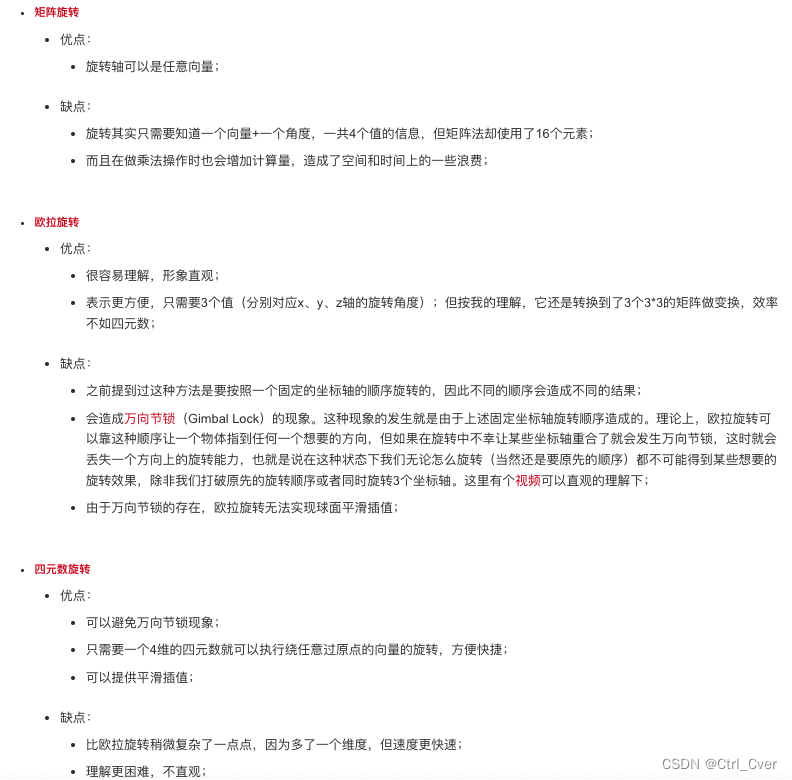
优缺点
参考: https://blog.youkuaiyun.com/xingqingly/article/details/45605557?spm=1001.2014.3001.5502
重点:如果我们想要平滑旋转角度的话,最好把它转换成四元数进行平滑处理,平滑后再转换回去。
其他
如果读者是深度学习研究者,知道smpl的话;网络学习的不是关节点的3*3矩阵,而是6d 旋转矩阵,转换为6d 旋转矩阵有利于网络回归,具体参考论文:On the Continuity of Rotation Representations in Neural Networks

















 3569
3569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









