







 本文介绍了Voronoi Diagram在路径规划中的应用,通过离散采点构建多边形Voronoi图,然后筛选出避开障碍的可行路径。关键步骤包括scipy库的Voronoi算法构建和障碍物排除。实现链接提供了代码参考。
本文介绍了Voronoi Diagram在路径规划中的应用,通过离散采点构建多边形Voronoi图,然后筛选出避开障碍的可行路径。关键步骤包括scipy库的Voronoi算法构建和障碍物排除。实现链接提供了代码参考。
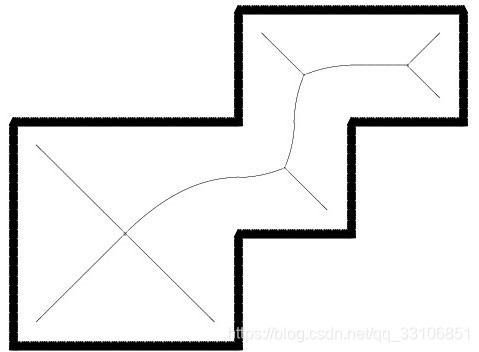
Voronoi_Diagram最大化的利用了障碍物之间的空隙,确保生成的路径是最大程度远离所有障碍物的安全行驶路径。与图像的距离变换算法很相似。
1、多边形或栅格图离散采点 points,
2、scipy.spatial.Voronoi(points)。
3、Voronoi diagram构造完成之后,消除顶点包含在障碍物或者与障碍物相交的Voronoi Edge,剩下的Voronoi Edge就构成了避开所有障碍物的可行驶路径集合。
实现代码参考:https://github.com/AtsushiSakai/PythonRobotics/blob/master/PathPlanning/VoronoiRoadMap/voronoi_road_map.py

















10-08
 1万+
1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









