







 本文深入剖析STM32 HAL库中定时器的配置及使用方法,包括结构体定义、中断处理流程,并给出完整的示例代码。
本文深入剖析STM32 HAL库中定时器的配置及使用方法,包括结构体定义、中断处理流程,并给出完整的示例代码。
前言
本次博客更新了HAL库的版本。以后的博客都会采用此HAL库版本。
HAL库版本:
- STM32Cube_FW_F4_V1.25.0
本篇博客主要介绍基本定时器中的源码解析,会涉及以下三个部分:
- 以整点原子定时器中断实验的程序为蓝本的程序解析
- 重点的结构体介绍
- 个人根据解析结果,最后分享自己的写的源代码
需要注意的是:本文介绍的源代码使用的并非基本定时器TIM6或者TIM7,而是通用定时器TIM3。但是,他们程序上是兼容的,只需将TIM3当做基本定时器即可。在最后的自我分享代码中,会严格的使用TIM6.
由于基本定时器不会与外界有直接的硬件连接,本文就不介绍硬件情况。
结构体
TIM_HandleTypeDef
/**
* @brief TIM Time Base Handle Structure definition
*/
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
typedef struct __TIM_HandleTypeDef
#else
typedef struct
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
{
TIM_TypeDef *Instance; /*!< Register base address */
TIM_Base_InitTypeDef Init; /*!< TIM Time Base required parameters */
HAL_TIM_ActiveChannel Channel; /*!< Active channel */
DMA_HandleTypeDef *hdma[7]; /*!< DMA Handlers array
This array is accessed by a @ref DMA_Handle_index */
HAL_LockTypeDef Lock; /*!< Locking object */
__IO HAL_TIM_StateTypeDef State; /*!< TIM operation state */
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
void (* Base_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Base Msp Init Callback */
void (* Base_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Base Msp DeInit Callback */
void (* IC_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM IC Msp Init Callback */
void (* IC_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM IC Msp DeInit Callback */
void (* OC_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM OC Msp Init Callback */
void (* OC_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM OC Msp DeInit Callback */
void (* PWM_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM PWM Msp Init Callback */
void (* PWM_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM PWM Msp DeInit Callback */
void (* OnePulse_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM One Pulse Msp Init Callback */
void (* OnePulse_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM One Pulse Msp DeInit Callback */
void (* Encoder_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Encoder Msp Init Callback */
void (* Encoder_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Encoder Msp DeInit Callback */
void (* HallSensor_MspInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Hall Sensor Msp Init Callback */
void (* HallSensor_MspDeInitCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Hall Sensor Msp DeInit Callback */
void (* PeriodElapsedCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Period Elapsed Callback */
void (* PeriodElapsedHalfCpltCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Period Elapsed half complete Callback */
void (* TriggerCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Trigger Callback */
void (* TriggerHalfCpltCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Trigger half complete Callback */
void (* IC_CaptureCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Input Capture Callback */
void (* IC_CaptureHalfCpltCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Input Capture half complete Callback */
void (* OC_DelayElapsedCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Output Compare Delay Elapsed Callback */
void (* PWM_PulseFinishedCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM PWM Pulse Finished Callback */
void (* PWM_PulseFinishedHalfCpltCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM PWM Pulse Finished half complete Callback */
void (* ErrorCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Error Callback */
void (* CommutationCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Commutation Callback */
void (* CommutationHalfCpltCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Commutation half complete Callback */
void (* BreakCallback)(struct __TIM_HandleTypeDef *htim); /*!< TIM Break Callback */
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
} TIM_HandleTypeDef;
相对于低版本的HAL库,此处最大的改动就是增加了宏USE_HAL_TIM_REGISTER_CALLBACKS。若此宏有效,则表明每个句柄都有独立的中断回调函数,定义在结构体中。默认情况下,该宏为无效,所以为了方便,舍去无意义代码,变为:
/**
* @brief TIM Time Base Handle Structure definition
*/
typedef struct
{
TIM_TypeDef *Instance; /*!< Register base address */
TIM_Base_InitTypeDef Init; /*!< TIM Time Base required parameters */
HAL_TIM_ActiveChannel Channel; /*!< Active channel */
DMA_HandleTypeDef *hdma[7]; /*!< DMA Handlers array
This array is accessed by a @ref DMA_Handle_index */
HAL_LockTypeDef Lock; /*!< Locking object */
__IO HAL_TIM_StateTypeDef State; /*!< TIM operation state */
} TIM_HandleTypeDef;
Instance(句柄对应时钟)
此用于选择时钟源,可以选择的参数如下:
#define TIM1 ((TIM_TypeDef *) TIM1_BASE)
#define TIM2 ((TIM_TypeDef *) TIM2_BASE)
#define TIM3 ((TIM_TypeDef *) TIM3_BASE)
#define TIM4 ((TIM_TypeDef *) TIM4_BASE)
#define TIM5 ((TIM_TypeDef *) TIM5_BASE)
#define TIM6 ((TIM_TypeDef *) TIM6_BASE)
#define TIM7 ((TIM_TypeDef *) TIM7_BASE)
#define TIM8 ((TIM_TypeDef *) TIM8_BASE)
#define TIM9 ((TIM_TypeDef *) TIM9_BASE)
#define TIM10 ((TIM_TypeDef *) TIM10_BASE)
#define TIM11 ((TIM_TypeDef *) TIM11_BASE)
#define TIM12 ((TIM_TypeDef *) TIM12_BASE)
#define TIM13 ((TIM_TypeDef *) TIM13_BASE)
#define TIM14 ((TIM_TypeDef *) TIM14_BASE)
Init(初始化结构体)
该结构体将在TIM_Base_InitTypeDef详细介绍,主要与初始化参数相关。
Channel(通道)
用于选择通道,具体的参数定义如下:
/**
* @brief HAL Active channel structures definition
*/
typedef enum
{
HAL_TIM_ACTIVE_CHANNEL_1 = 0x01U, /*!< The active channel is 1 */
HAL_TIM_ACTIVE_CHANNEL_2 = 0x02U, /*!< The active channel is 2 */
HAL_TIM_ACTIVE_CHANNEL_3 = 0x04U, /*!< The active channel is 3 */
HAL_TIM_ACTIVE_CHANNEL_4 = 0x08U, /*!< The active channel is 4 */
HAL_TIM_ACTIVE_CHANNEL_CLEARED = 0x00U /*!< All active channels cleared */
} HAL_TIM_ActiveChannel;
hdma(DMA句柄)
DMA相关的句柄,此处不再详细讲解。
Lock(锁)
HAL库的锁,具体定义如下:
/**
* @brief HAL Lock structures definition
*/
typedef enum
{
HAL_UNLOCKED = 0x00U,
HAL_LOCKED = 0x01U
} HAL_LockTypeDef;
State(状态)
时钟的状态,参数可以如下选择:
/**
* @brief HAL State structures definition
*/
typedef enum
{
HAL_TIM_STATE_RESET = 0x00U, /*!< Peripheral not yet initialized or disabled */
HAL_TIM_STATE_READY = 0x01U, /*!< Peripheral Initialized and ready for use */
HAL_TIM_STATE_BUSY = 0x02U, /*!< An internal process is ongoing */
HAL_TIM_STATE_TIMEOUT = 0x03U, /*!< Timeout state */
HAL_TIM_STATE_ERROR = 0x04U /*!< Reception process is ongoing */
} HAL_TIM_StateTypeDef;
TIM_Base_InitTypeDef
/**
* @brief TIM Time base Configuration Structure definition
*/
typedef struct
{
uint32_t Prescaler; /*!< Specifies the prescaler value used to divide the TIM clock.
This parameter can be a number between Min_Data = 0x0000 and Max_Data = 0xFFFF */
uint32_t CounterMode; /*!< Specifies the counter mode.
This parameter can be a value of @ref TIM_Counter_Mode */
uint32_t Period; /*!< Specifies the period value to be loaded into the active
Auto-Reload Register at the next update event.
This parameter can be a number between Min_Data = 0x0000 and Max_Data = 0xFFFF. */
uint32_t ClockDivision; /*!< Specifies the clock division.
This parameter can be a value of @ref TIM_ClockDivision */
uint32_t RepetitionCounter; /*!< Specifies the repetition counter value. Each time the RCR downcounter
reaches zero, an update event is generated and counting restarts
from the RCR value (N).
This means in PWM mode that (N+1) corresponds to:
- the number of PWM periods in edge-aligned mode
- the number of half PWM period in center-aligned mode
GP timers: this parameter must be a number between Min_Data = 0x00 and Max_Data = 0xFF.
Advanced timers: this parameter must be a number between Min_Data = 0x0000 and Max_Data = 0xFFFF. */
uint32_t AutoReloadPreload; /*!< Specifies the auto-reload preload.
This parameter can be a value of @ref TIM_AutoReloadPreload */
} TIM_Base_InitTypeDef;
Prescaler(预分频)
预分频的取值范围:0-65535。经过分频后的时钟
o u t p u t = i n p u t p r e s c a l e r + 1 output=\frac{input}{prescaler+1} output=prescaler+1input
即分配系统为寄存器值+1.
CounterMode(计数模式)
计数模式可以从以下参数中选取:
/** @defgroup TIM_Counter_Mode TIM Counter Mode
* @{
*/
#define TIM_COUNTERMODE_UP 0x00000000U /*!< Counter used as up-counter */
#define TIM_COUNTERMODE_DOWN TIM_CR1_DIR /*!< Counter used as down-counter */
#define TIM_COUNTERMODE_CENTERALIGNED1 TIM_CR1_CMS_0 /*!< Center-aligned mode 1 */
#define TIM_COUNTERMODE_CENTERALIGNED2 TIM_CR1_CMS_1 /*!< Center-aligned mode 2 */
#define TIM_COUNTERMODE_CENTERALIGNED3 TIM_CR1_CMS /*!< Center-aligned mode 3 */
/**
* @}
*/
Period(周期数)
周期数的取值范围为0-65535。其作用形式等同于预分频,周期数为寄存器值家1.
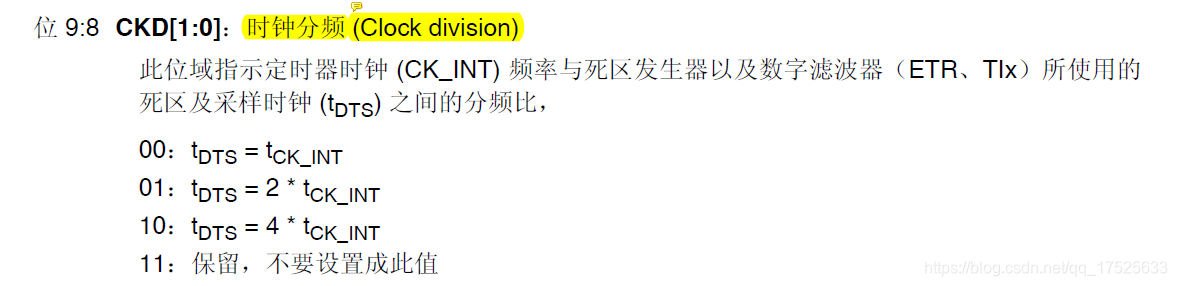
ClockDivision(时钟分频)
参数选取为:
/** @defgroup TIM_ClockDivision TIM Clock Division
* @{
*/
#define TIM_CLOCKDIVISION_DIV1 0x00000000U /*!< Clock division: tDTS=tCK_INT */
#define TIM_CLOCKDIVISION_DIV2 TIM_CR1_CKD_0 /*!< Clock division: tDTS=2*tCK_INT */
#define TIM_CLOCKDIVISION_DIV4 TIM_CR1_CKD_1 /*!< Clock division: tDTS=4*tCK_INT */
/**
* @}
*/
RepetitionCounter(重复计数)
该值只有高级时钟才会使用。
AutoReloadPreload(自动重载影子寄存器使能)
用于控制自动重载寄存器的影子寄存器是否使能。取值范围为:
/** @defgroup TIM_AutoReloadPreload TIM Auto-Reload Preload
* @{
*/
#define TIM_AUTORELOAD_PRELOAD_DISABLE 0x00000000U /*!< TIMx_ARR register is not buffered */
#define TIM_AUTORELOAD_PRELOAD_ENABLE TIM_CR1_ARPE /*!< TIMx_ARR register is buffered */
/**
* @}
*/
源代码
主函数
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "key.h"
#include "timer.h"
int main(void)
{
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180); //初始化延时函数
LED_Init(); //初始化LED
TIM3_Init(5000-1,9000-1); //定时器3初始化,定时器时钟为90M,分频系数为9000-1,
//所以定时器3的频率为90M/9000=10K,自动重装载为5000-1,那么定时器周期就是500ms
while(1)
{
LED0=!LED0; //LED0翻转
delay_ms(200); //延时200ms
}
}
在主函数中,主要调用了TIM3_Init来配置定时器TIM3。最红通过延时程序,在while循环中实现LED0的循环点亮。而与定时器相关的LED1则是通过定时器触发中断的方式来实现改变状态的。
配置
TIM3_Init
/**
* @brief 计时器TIM3配置
* @note 无
* @param {u16} arr 自动装载值
* @param {u16} psc 预分频数
* @retval 无
*/
void TIM3_Init(u16 arr, u16 psc)
{
/* 1.使能时钟 */
__HAL_RCC_TIM3_CLK_ENABLE(); //使能TIM3时钟
/* 2.初始化配置 */
TIM3_Handler.Instance = TIM3; //通用定时器3
TIM3_Handler.Init.Prescaler = psc; //分频系数
TIM3_Handler.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数器
TIM3_Handler.Init.Period = arr; //自动装载值
TIM3_Handler.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //时钟分频因子
HAL_TIM_Base_Init(&TIM3_Handler);
/* 3.启动时钟 */
HAL_TIM_Base_Start_IT(&TIM3_Handler); //使能定时器3和定时器3更新中断:TIM_IT_UPDATE
}
该段程序由正点原子实现的。主要分成三个部分:
- 使能时钟
- 初始化定时器
- 启动时钟
其中,调用了库函数HAL_TIM_Base_Init和HAL_TIM_Base_Start_IT。下面将重点介绍着两个函数。
HAL_TIM_Base_Init
/**
* @brief Initializes the TIM Time base Unit according to the specified
* parameters in the TIM_HandleTypeDef and initialize the associated handle.
* @note Switching from Center Aligned counter mode to Edge counter mode (or reverse)
* requires a timer reset to avoid unexpected direction
* due to DIR bit readonly in center aligned mode.
* Ex: call @ref HAL_TIM_Base_DeInit() before HAL_TIM_Base_Init()
* @param htim TIM Base handle
* @retval HAL status
*/
HAL_StatusTypeDef HAL_TIM_Base_Init(TIM_HandleTypeDef *htim)
{
/*********************1.参数检查********************************/
/* Check the TIM handle allocation */
if (htim == NULL)
{
return HAL_ERROR;
}
/* Check the parameters */
assert_param(IS_TIM_INSTANCE(htim->Instance));
assert_param(IS_TIM_COUNTER_MODE(htim->Init.CounterMode));
assert_param(IS_TIM_CLOCKDIVISION_DIV(htim->Init.ClockDivision));
assert_param(IS_TIM_AUTORELOAD_PRELOAD(htim->Init.AutoReloadPreload));
/*********************2.配置底层信息********************************/
if (htim->State == HAL_TIM_STATE_RESET)
{
/* Allocate lock resource and initialize it */
htim->Lock = HAL_UNLOCKED;
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
/* Reset interrupt callbacks to legacy weak callbacks */
TIM_ResetCallback(htim);
if (htim->Base_MspInitCallback == NULL)
{
htim->Base_MspInitCallback = HAL_TIM_Base_MspInit;
}
/* Init the low level hardware : GPIO, CLOCK, NVIC */
htim->Base_MspInitCallback(htim);
#else
/* Init the low level hardware : GPIO, CLOCK, NVIC */
HAL_TIM_Base_MspInit(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Set the TIM state */
htim->State = HAL_TIM_STATE_BUSY;
/*********************3.配置定时器基本信息********************************/
/* Set the Time Base configuration */
TIM_Base_SetConfig(htim->Instance, &htim->Init);
/* Initialize the TIM state*/
htim->State = HAL_TIM_STATE_READY;
return HAL_OK;
}
该函数分成以下几个步骤:
- 检查参数类型
- 底层初始化
- 计时器初始化
状态变化:
- HAL_TIM_STATE_RESET——初始状态,未初始化过
- HAL_TIM_STATE_BUSY——底层初始化之后,要进行计时器的配置
- HAL_TIM_STATE_READY——配置完成,计时器可以使用
其中调用了两个函数:
- HAL_TIM_Base_MspInit——底层配置
- TIM_Base_SetConfig——定时器配置
HAL_TIM_Base_MspInit
/**
* @brief 底层驱动
* @note 无
* @param {TIM_HandleTypeDef} *htim 计时器句柄
* @retval 无
*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM3)
{
HAL_NVIC_SetPriority(TIM3_IRQn, 1, 3); //设置中断优先级,抢占优先级1,子优先级3
HAL_NVIC_EnableIRQ(TIM3_IRQn); //开启ITM3中断
}
}
该函数由自己实现,主要参考了正点原子的代码。实现的功能很简单,就是配置中断的优先级,使能中断。
TIM_Base_SetConfig
/**
* @brief Time Base configuration
* @param TIMx TIM peripheral
* @param Structure TIM Base configuration structure
* @retval None
*/
void TIM_Base_SetConfig(TIM_TypeDef *TIMx, TIM_Base_InitTypeDef *Structure)
{
/*********************1.设置CR1寄存器********************************/
uint32_t tmpcr1;
tmpcr1 = TIMx->CR1;
/* Set TIM Time Base Unit parameters ---------------------------------------*/
if (IS_TIM_COUNTER_MODE_SELECT_INSTANCE(TIMx)) //1,2,3,4,5,8:可以选择计数器的方向
{
/* Select the Counter Mode */
tmpcr1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
tmpcr1 |= Structure->CounterMode;
}
if (IS_TIM_CLOCK_DIVISION_INSTANCE(TIMx)) //除了6,7:可以设置时钟分频
{
/* Set the clock division */
tmpcr1 &= ~TIM_CR1_CKD;
tmpcr1 |= (uint32_t)Structure->ClockDivision;
}
/* Set the auto-reload preload */
MODIFY_REG(tmpcr1, TIM_CR1_ARPE, Structure->AutoReloadPreload); //设置自动加载寄存器的影子寄存器
TIMx->CR1 = tmpcr1;
/*********************2.设置ARR寄存器********************************/
/* Set the Autoreload value */
TIMx->ARR = (uint32_t)Structure->Period; //设置时钟的周期
/*********************3.设置PSC寄存器********************************/
/* Set the Prescaler value */
TIMx->PSC = Structure->Prescaler; //设置时钟的预分频
/*********************4.设置RCR 寄存器********************************/
if (IS_TIM_REPETITION_COUNTER_INSTANCE(TIMx)) //1,8:支持重复计数器,高级时钟
{
/* Set the Repetition Counter value */
TIMx->RCR = Structure->RepetitionCounter;
}
/*********************5.设置EGR 寄存器********************************/
/* Generate an update event to reload the Prescaler
and the repetition counter (only for advanced timer) value immediately */
TIMx->EGR = TIM_EGR_UG;
}
在该函数中,总共设置5组寄存器。但需要注意的是,对于基本定时器而言,其实只有1,2,3,5步骤是有意义的。尤其需要注意的有两点:
- 在第1步中,唯一有意义的就是设置自动加载寄存器的影子寄存器。
- 在第5步中,通过设置UG,触发更新事件,将影子寄存器的值生效,也就是将刚刚写入的预分频寄存器的数据生效。
HAL_TIM_Base_Start_IT
/**
* @brief Starts the TIM Base generation in interrupt mode.
* @param htim TIM Base handle
* @retval HAL status
*/
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim)
{
uint32_t tmpsmcr;
/*********************1.检测参数********************************/
/* Check the parameters */
assert_param(IS_TIM_INSTANCE(htim->Instance));
/*********************2.使能向上计数中断********************************/
/* Enable the TIM Update interrupt */
__HAL_TIM_ENABLE_IT(htim, TIM_IT_UPDATE);
/*********************3.使能外设********************************/
/* Enable the Peripheral, except in trigger mode where enable is automatically done with trigger */
tmpsmcr = htim->Instance->SMCR & TIM_SMCR_SMS;
/*********************4.使能计时器********************************/
if (!IS_TIM_SLAVEMODE_TRIGGER_ENABLED(tmpsmcr))
{
__HAL_TIM_ENABLE(htim);
}
/* Return function status */
return HAL_OK;
}
该函数大致分成4各部分:
- 检测参数
- 使能计数器中断
- 使能外设
- 使能定时器
其中,与基本定时器相关的为2与4步。他们的宏定义如下所示:
/** @brief Enable the specified TIM interrupt.
* @param __HANDLE__ specifies the TIM Handle.
* @param __INTERRUPT__ specifies the TIM interrupt source to enable.
* This parameter can be one of the following values:
* @arg TIM_IT_UPDATE: Update interrupt
* @arg TIM_IT_CC1: Capture/Compare 1 interrupt
* @arg TIM_IT_CC2: Capture/Compare 2 interrupt
* @arg TIM_IT_CC3: Capture/Compare 3 interrupt
* @arg TIM_IT_CC4: Capture/Compare 4 interrupt
* @arg TIM_IT_COM: Commutation interrupt
* @arg TIM_IT_TRIGGER: Trigger interrupt
* @arg TIM_IT_BREAK: Break interrupt
* @retval None
*/
#define __HAL_TIM_ENABLE_IT(__HANDLE__, __INTERRUPT__) ((__HANDLE__)->Instance->DIER |= (__INTERRUPT__))
/**
* @brief Enable the TIM peripheral.
* @param __HANDLE__ TIM handle
* @retval None
*/
#define __HAL_TIM_ENABLE(__HANDLE__) ((__HANDLE__)->Instance->CR1|=(TIM_CR1_CEN))
都是通过直接设置寄存器实现。
中断响应
TIM3_IRQHandler
/**
* @brief TIM3中断响应函数
* @note 自动被调用
* @param {*}无
* @retval 无
*/
void TIM3_IRQHandler(void)
{
HAL_TIM_IRQHandler(&TIM3_Handler);
}
在中断响应中,直接调用HAL_TIM_IRQHandler()来判断中断类型。
HAL_TIM_IRQHandler
/**
* @brief This function handles TIM interrupts requests.
* @param htim TIM handle
* @retval None
*/
void HAL_TIM_IRQHandler(TIM_HandleTypeDef *htim)
{
/* Capture compare 1 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC1) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC1) != RESET)
{
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC1);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_1;
/* Input capture event */
if ((htim->Instance->CCMR1 & TIM_CCMR1_CC1S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
}
/* Capture compare 2 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC2) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC2) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC2);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_2;
/* Input capture event */
if ((htim->Instance->CCMR1 & TIM_CCMR1_CC2S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
/* Capture compare 3 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC3) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC3) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC3);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_3;
/* Input capture event */
if ((htim->Instance->CCMR2 & TIM_CCMR2_CC3S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
/* Capture compare 4 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC4) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC4) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC4);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_4;
/* Input capture event */
if ((htim->Instance->CCMR2 & TIM_CCMR2_CC4S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
/* TIM Update event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_UPDATE);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->PeriodElapsedCallback(htim);
#else
HAL_TIM_PeriodElapsedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
/* TIM Break input event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_BREAK) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_BREAK) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_BREAK);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->BreakCallback(htim);
#else
HAL_TIMEx_BreakCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
/* TIM Trigger detection event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_TRIGGER) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_TRIGGER) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_TRIGGER);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->TriggerCallback(htim);
#else
HAL_TIM_TriggerCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
/* TIM commutation event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_COM) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_COM) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_FLAG_COM);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->CommutationCallback(htim);
#else
HAL_TIMEx_CommutCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
}
首先,通过中断标志位来判断响应的是哪一个中断。可以抽取该函数的骨架来看:
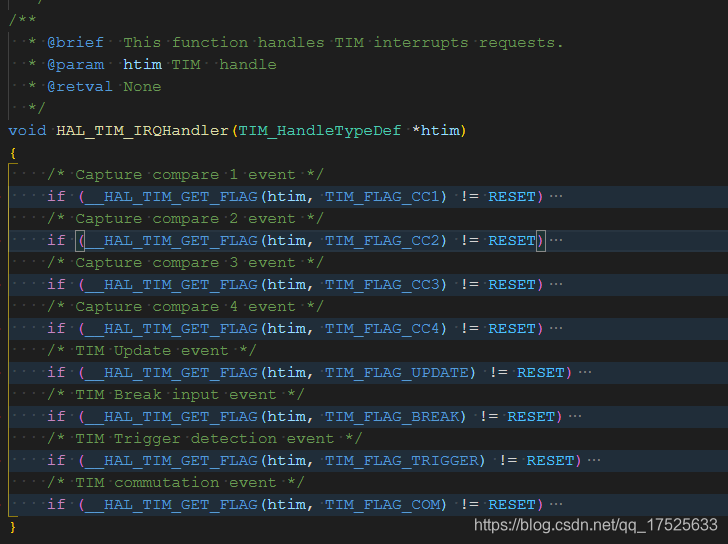
其中每个分支的实现方式大致相同,本文选基本定时器功能来讲解:
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_UPDATE);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->PeriodElapsedCallback(htim);
#else
HAL_TIM_PeriodElapsedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
该函数主要实现功能:
- 判断该中断标志位是否置1以及该中断是否使能,若两者皆是,则响应该中断。
- 清除中断标志位。
- 调用中断回调函数。
以上步骤也是经典的HAL库对于中断的处理方法。
其中,判断中断位和判断中断源的宏定义为:
/** @brief Check whether the specified TIM interrupt flag is set or not.
* @param __HANDLE__ specifies the TIM Handle.
* @param __FLAG__ specifies the TIM interrupt flag to check.
* This parameter can be one of the following values:
* @arg TIM_FLAG_UPDATE: Update interrupt flag
* @arg TIM_FLAG_CC1: Capture/Compare 1 interrupt flag
* @arg TIM_FLAG_CC2: Capture/Compare 2 interrupt flag
* @arg TIM_FLAG_CC3: Capture/Compare 3 interrupt flag
* @arg TIM_FLAG_CC4: Capture/Compare 4 interrupt flag
* @arg TIM_FLAG_COM: Commutation interrupt flag
* @arg TIM_FLAG_TRIGGER: Trigger interrupt flag
* @arg TIM_FLAG_BREAK: Break interrupt flag
* @arg TIM_FLAG_CC1OF: Capture/Compare 1 overcapture flag
* @arg TIM_FLAG_CC2OF: Capture/Compare 2 overcapture flag
* @arg TIM_FLAG_CC3OF: Capture/Compare 3 overcapture flag
* @arg TIM_FLAG_CC4OF: Capture/Compare 4 overcapture flag
* @retval The new state of __FLAG__ (TRUE or FALSE).
*/
#define __HAL_TIM_GET_FLAG(__HANDLE__, __FLAG__) (((__HANDLE__)->Instance->SR &(__FLAG__)) == (__FLAG__))
/**
* @brief Check whether the specified TIM interrupt source is enabled or not.
* @param __HANDLE__ TIM handle
* @param __INTERRUPT__ specifies the TIM interrupt source to check.
* This parameter can be one of the following values:
* @arg TIM_IT_UPDATE: Update interrupt
* @arg TIM_IT_CC1: Capture/Compare 1 interrupt
* @arg TIM_IT_CC2: Capture/Compare 2 interrupt
* @arg TIM_IT_CC3: Capture/Compare 3 interrupt
* @arg TIM_IT_CC4: Capture/Compare 4 interrupt
* @arg TIM_IT_COM: Commutation interrupt
* @arg TIM_IT_TRIGGER: Trigger interrupt
* @arg TIM_IT_BREAK: Break interrupt
* @retval The state of TIM_IT (SET or RESET).
*/
#define __HAL_TIM_GET_IT_SOURCE(__HANDLE__, __INTERRUPT__) ((((__HANDLE__)->Instance->DIER & (__INTERRUPT__)) \
== (__INTERRUPT__)) ? SET : RESET)
都是直接查询寄存器获得,此处不再详细分析。
HAL_TIM_PeriodElapsedCallback
中断回调函数由用户自己实现,正点原子的代码为:
/**
* @brief 中断回调函数
* @note 在HAL_TIM_IRQHandler函数中调用
* @param {TIM_HandleTypeDef} *htim 中断句柄
* @retval
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == (&TIM3_Handler))
{
LED1 = !LED1; //LED1反转
}
}
该函数很简单,通过判断句柄来确定中断源,从而实现自己的功能。
自我实现
参考博客<STM32CubeMX第四篇之基本定时器>

















 1315
1315

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









