







前言
本文主要参考文献为:
- 阮毅,杨影,陈伯时.电力拖动自动控制系统——运动控制系统
构建调速系统仿真平台的基本思想是得到系统各个环节的传递函数。使用的主要工具是MATLAB/Simulink平台。对于电力电子变换器主电路可以利用Simulink中Powesystem工具包实现。
控制系统的具体参数为:
型号为:z4-132-1,额定电压
U
N
=
400
V
\rm U_N=400V
UN=400V,额定电流为
I
d
N
=
52.2
A
\rm I_dN=52.2A
IdN=52.2A,额定转速为:
2610
r
/
m
\rm 2610 r/m
2610r/m,允许过载倍数
λ
=
1.5
\rm\lambda=1.5
λ=1.5。反电动势系数
C
e
=
0.1459
V
⋅
m
i
n
/
r
\rm C_e=0.1459V\cdot min/r
Ce=0.1459V⋅min/r。PWM变换器开关频率为8kHz。放大系数为
K
s
=
538
/
5
=
107.6
\rm K_s=538/5=107.6
Ks=538/5=107.6电枢回路的总电阻为:0.368 Ω。电枢电路电磁时间常数为:
T
l
=
0.0144
s
\rm T_l=0.0144s
Tl=0.0144s。电力拖动系统时间常数
T
m
=
0.18
s
\rm T_m=0.18 s
Tm=0.18s。转速反馈系数为:
α
=
0.00383
V
⋅
m
i
n
/
r
=
U
N
∗
/
n
N
\rm \alpha=0.00383V\cdot min/r=U_N^*/n_N
α=0.00383V⋅min/r=UN∗/nN。给定额定输入电压为
U
N
∗
=
10
V
\rm U_N^*=10V
UN∗=10V。
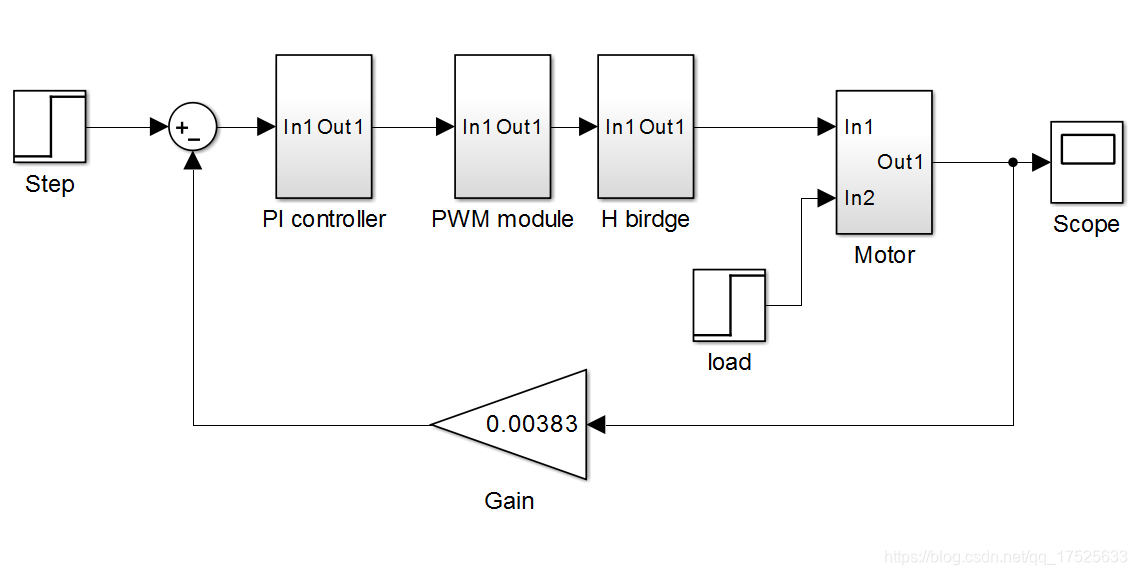
系统总体实现
系统共分成五个部分:
- 转速给定
- 速度调节器
- PWM模块
- H桥驱动电路
- 电动机
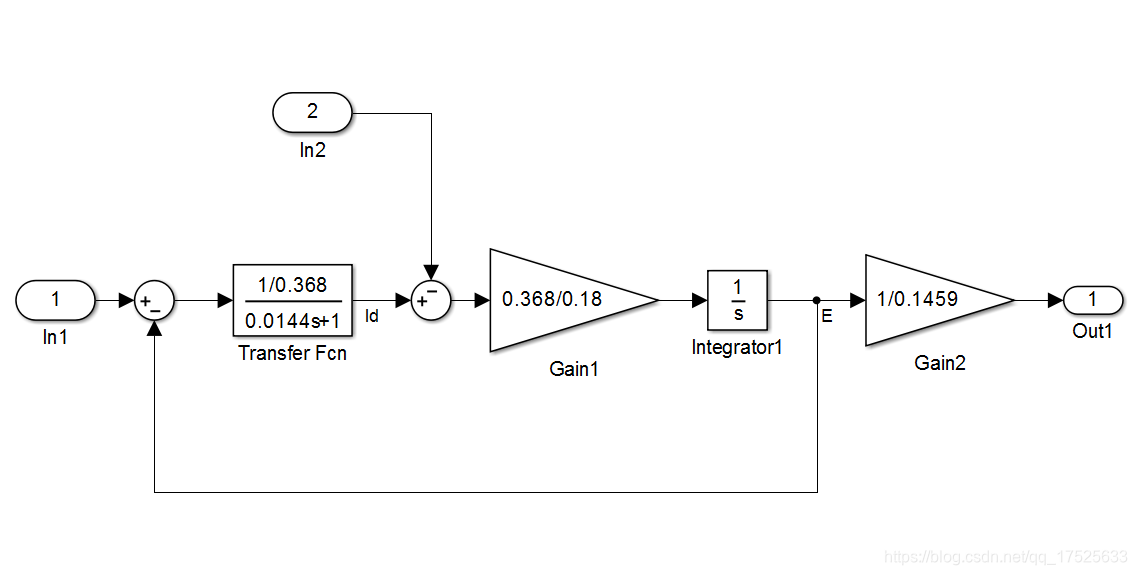
其中直流电动机的建模可以参阅博客(运动控制第一篇之直流电动机建模)。
总体模型如下图所示
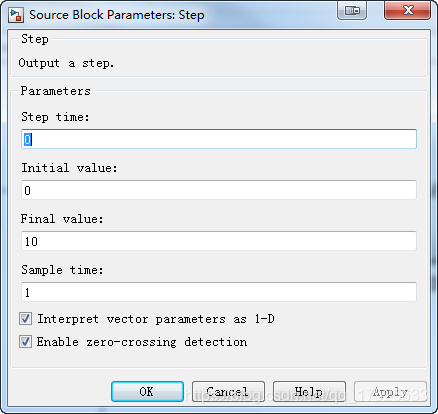
电压给定是在0时刻触发的阶跃信号,阶跃信号的幅值为10。具体参数如下图:
PI控制器
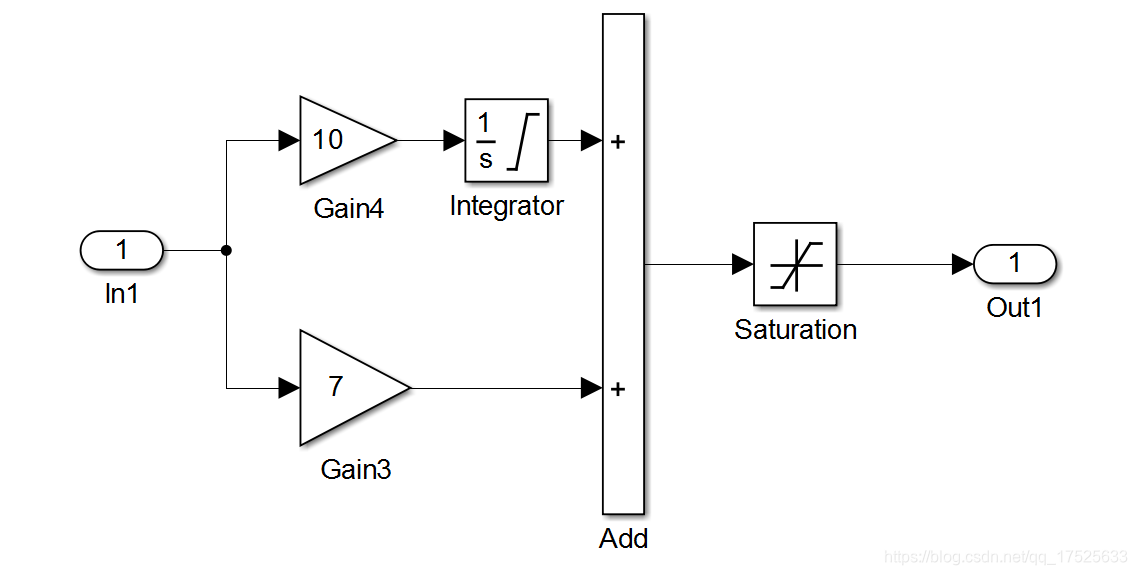
控制器和控制器中的积分器都有限幅,限幅值为5。控制器的参数还可以根据实际情况继续优化。图中显示的参数只是一个参考值。
PWM模块
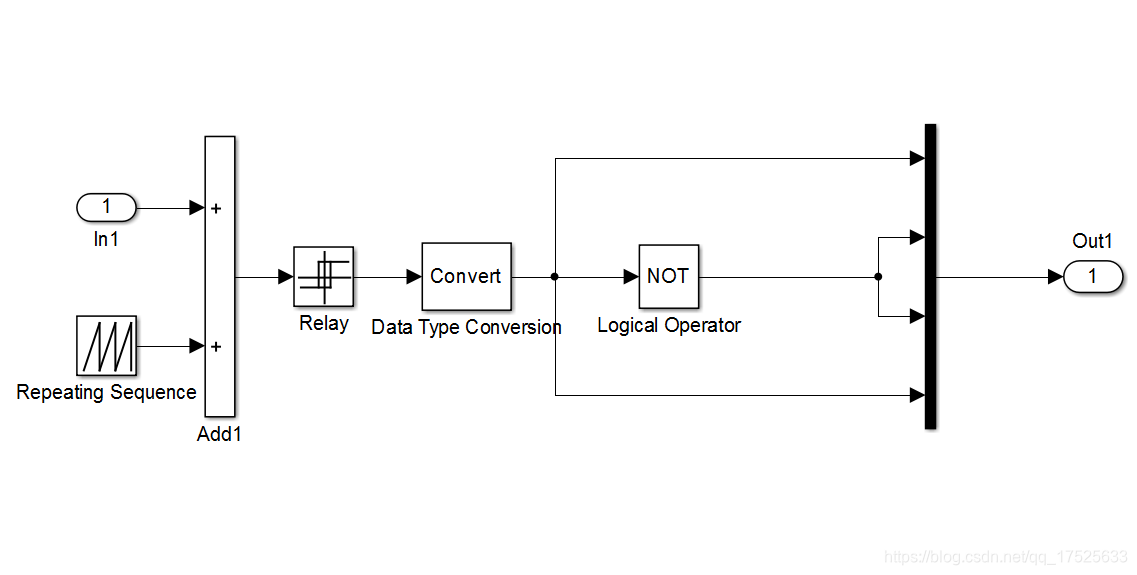
Repeating Sequence是一个周期为8kHz的三角波,其变化范围为-5到+5。
Relay是继电器模块。即当其输入值小于等于0时,其输出为0。当其输入值大于0,其输出值为1。
Data Type Conversion 是一个类型转换模块,将继电器输出转换为boolean型。
这样就产生了一个PWM波。并将PWM信号转换成4路信号,用于控制H桥的4个开关。
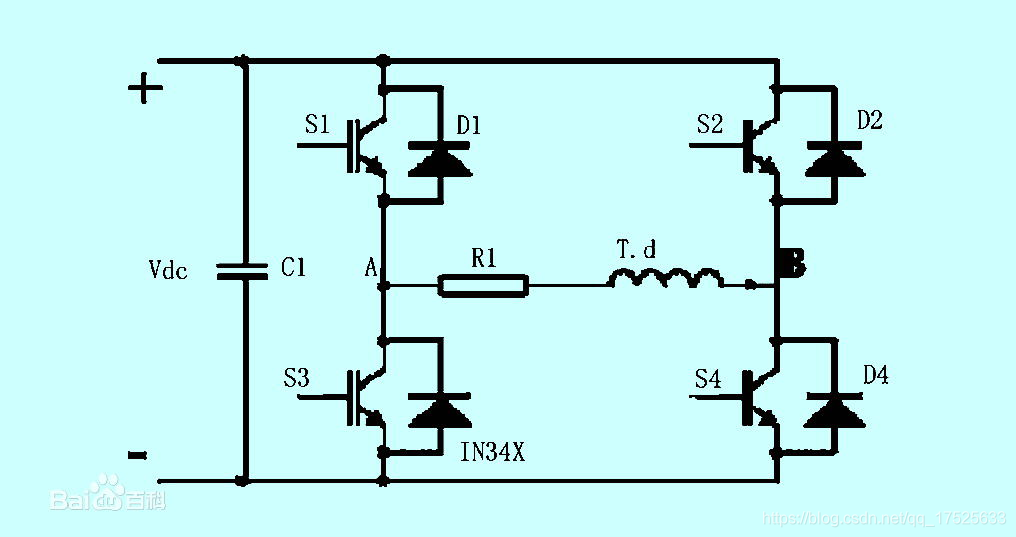
H桥模块
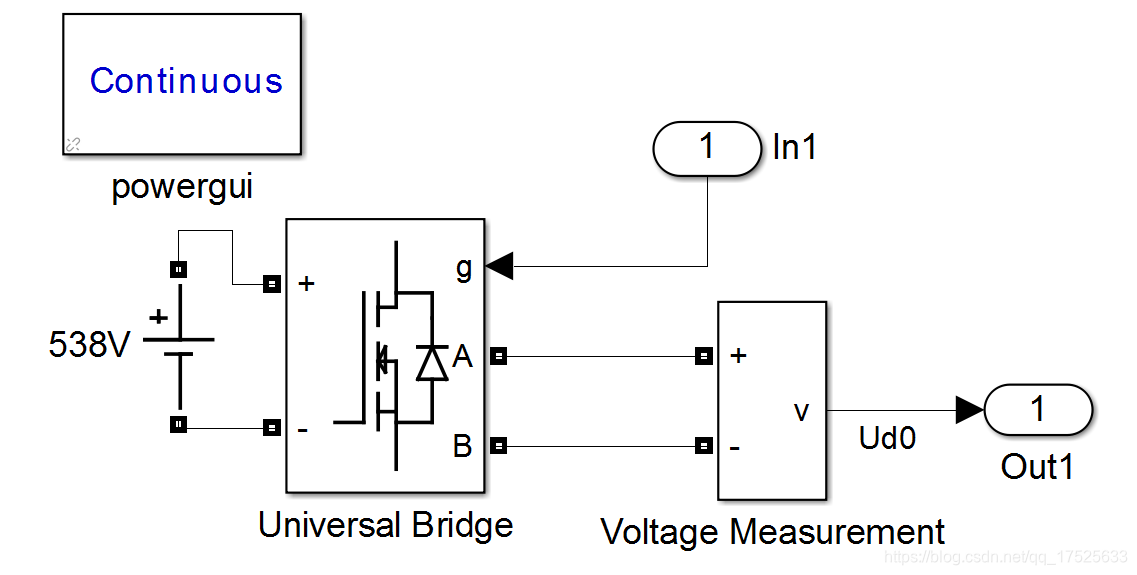
上图,全桥电路的原理图如下所示:
电动机模块
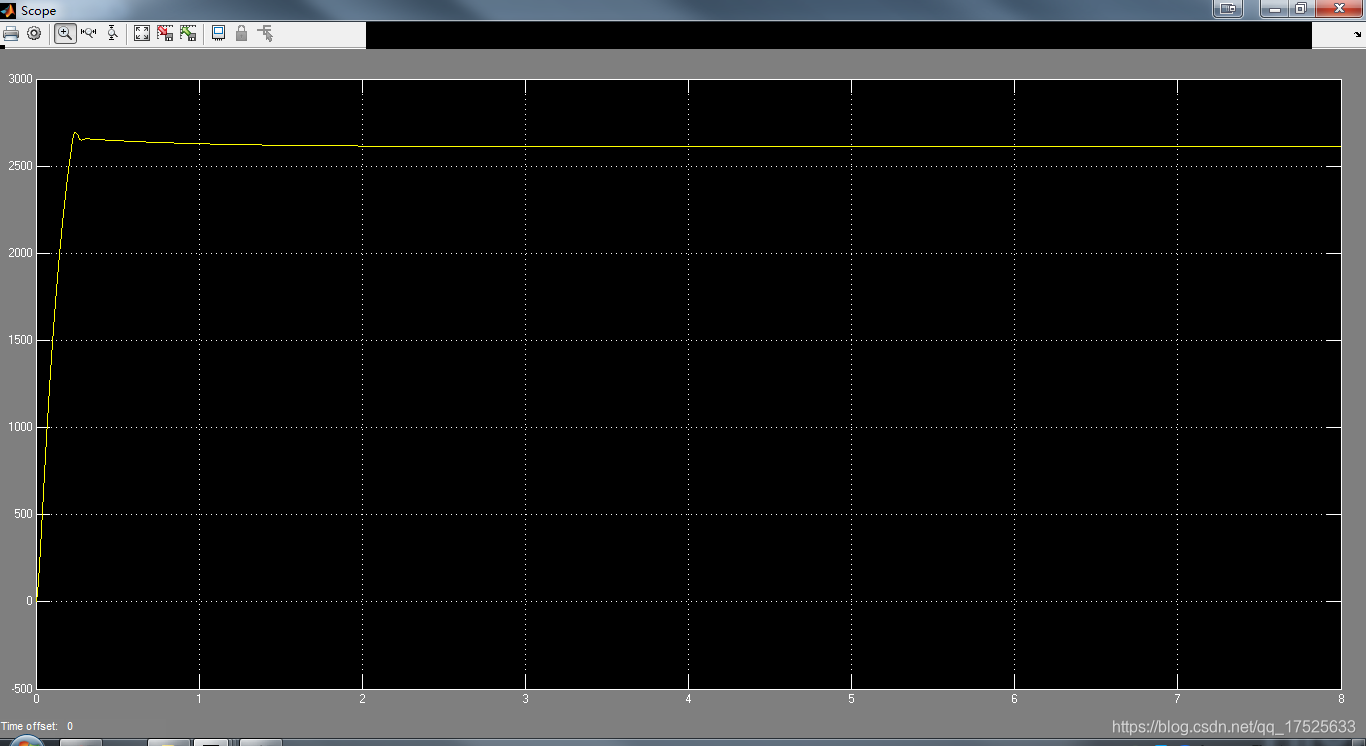
实验结果

















 3828
3828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









