





 文章探讨了一种新的模块间机电连接机制,旨在消除性别特征对模块化机械手装配构型的影响。通过介绍ModMan2连接器,它提供四向连接且具有大功率和多信号传输能力,对比了现有连接器的局限性。设计强调了无性别连接的完整性和模块配置的多样性。
文章探讨了一种新的模块间机电连接机制,旨在消除性别特征对模块化机械手装配构型的影响。通过介绍ModMan2连接器,它提供四向连接且具有大功率和多信号传输能力,对比了现有连接器的局限性。设计强调了无性别连接的完整性和模块配置的多样性。
作者:洪成勋等人
地址:汉阳大学
摘要:模块间连接侧的性别特征影响模块化机械手系统装配后的构型数量。介绍了一种模块间机电连接无性别耦合的模块化连接机构。连接可以通过四种90◦间隔的相对位置在两个模块之间建立。
1.简介
近十年来,模块化关节/连杆机构在模块化机器人领域得到了广泛的研究。根据以往的工作,现有的通信和电力的电气连接机制都是单向连接,如母/公连接器。这些连接机构/方法迫使模块化机器人进行有限的配置。
TracLabs公司的可重构模块化机械臂(RMM)的通用配套适配器(UMA)提供机械连接、动力传输和数据连接[1]。但是,这种连接机制在显示组装后的各种模块配置方面存在局限性。Thor连接器可以在内部圆形PCB(印刷电路板)中以八个不同的角度与六个弹簧针接触对齐[2]。HiGen有四个围绕中心轴的挂钩用于机械连接,以及一个圆形的环形定制PCB,带有十二个弹簧针触点,包括Power, GND, Signals用于电气连接[3]。这两种机制都存在电流小、模块间信号传递量少的局限性。Hong介绍了一种模块化机械臂关节配置的设计方法,并提出了一种无性别连接机制的关节模块[4]。这种连接机制需要PCB板之间的继电器连接机制,这就影响了连接机制的无性属性的完备性。因此,机械/电气连接机制的无性别完整性对于克服有限的配置数量和模块之间的耦合便利性至关重要。
在本文中,我们展示了一种连接方法和坐标框架,以识别模块化机械臂的关节和/或链接模块之间的耦合关系,在第2节和第3节中使用两种类型的旋转关节,型和
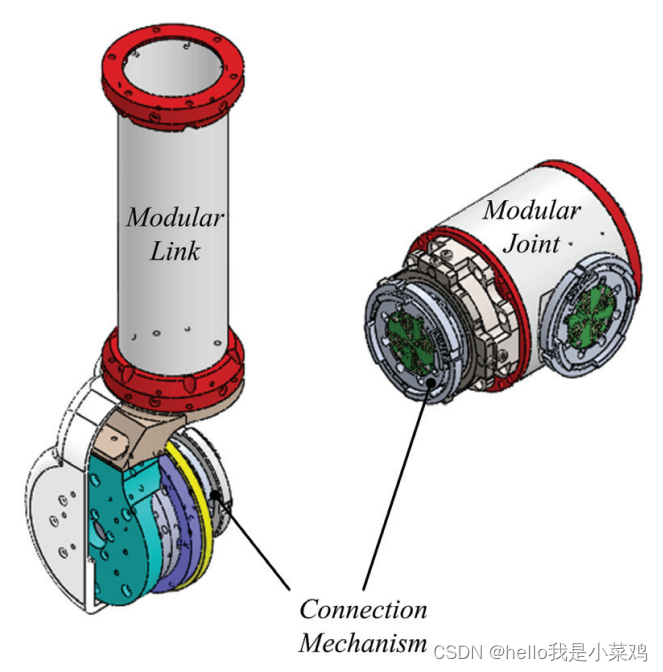
型。然后,在第四节中介绍了一种包括机械/电气连接在内的无性连接机构的设计。在第5节中,对这种无性别连接机制与其他机制的比较进行了讨论。图1显示了链路模块与关节模块之间的连接关系。
2. 关节与相邻连杆之间的关系
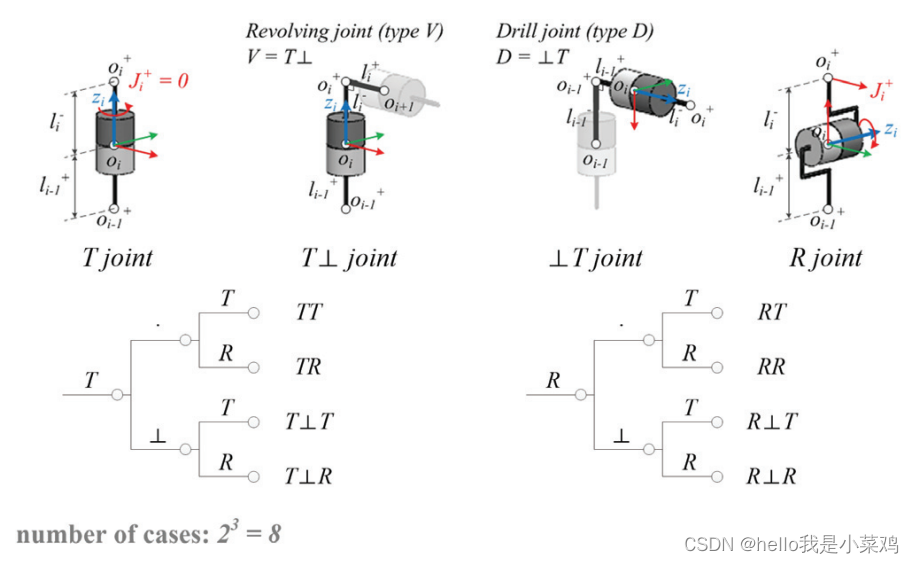
图2显示了使用型和
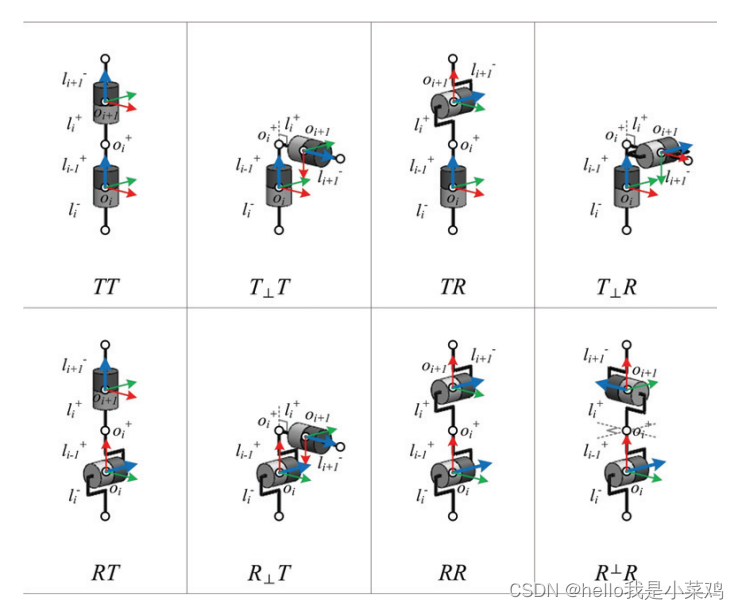
型关节的两个相邻关节配置集的8种情况。图3给出了两个相邻节点的示例。从现有机械手肩关节和腕关节的一部分可以很容易地找到
、
和
构型。
由两个
型关节组成,其中两个关节轴之间存在一个垂直的弯曲角作为角偏移。为了简单起见,这种构型有助于从
构型描述两个
型关节之间的弯曲连接。
构型由两个
关节组成,其中在两个关节之间的连接处存在一个垂直的扭转角作为角偏移。图4显示了32例3个相邻关节的情况。图5给出了3个相邻关节的12个示例,除了在机械手的肩关节或腕关节中没有配置串联的两个相同关节的情况。如上所述,关节构型是一种用于分类和描述一般类型的串联链机械臂的符号方法。串链机械臂可以用R型和T型关节串联相邻关节进行符号化描述。
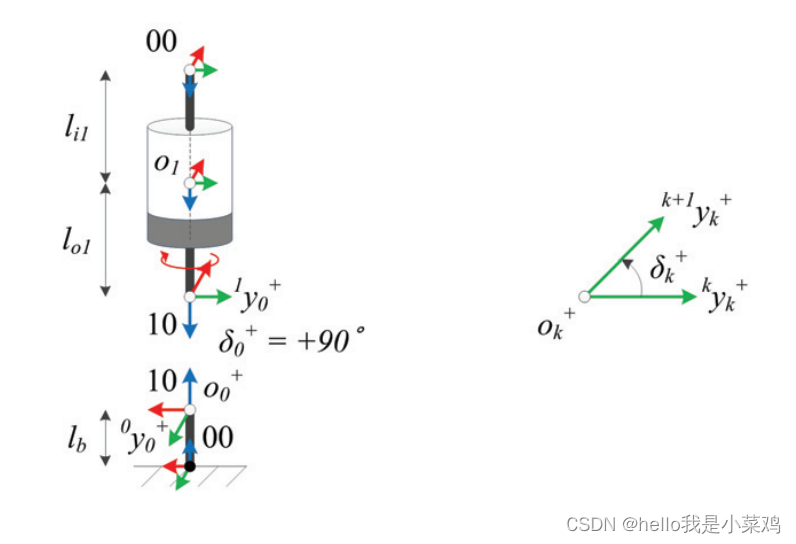
3. 转动关节的坐标系
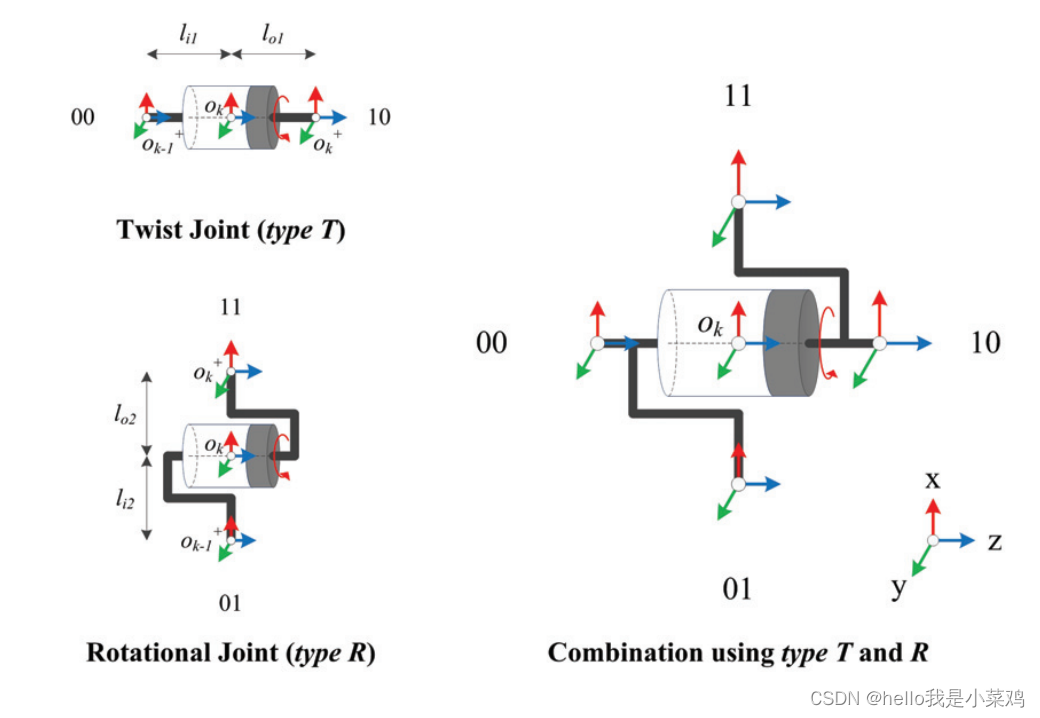
关节的输入输出链路的方向或链路与轴
之间的角度可以用二进制数的两位来表示,如图6所示。MSB(Most Significant Bit,最重要字节)表示输入链路(0)或输出链路(1)。LSB(Least Significant Bit,最不重要字节)是指围绕
轴的
型关节的重合(0)链路或
型关节的垂直(1)链路。例如,
型关节的输入和输出分别是01和10。在
型关节的情况下,关节
的节点
处的输入链路和输出链路的长度分别为
和
。在
型关节的情况下,关节
的节点
处的输入链路和输出链路的长度分别为
和
。相邻节点或连杆之间的连接角
确定为节点
处
与
之间的夹角,如图7所示。节点
的
轴方向为连接方向的初始方向。图7显示了反向连接方向和+90◦连接方向的示例。
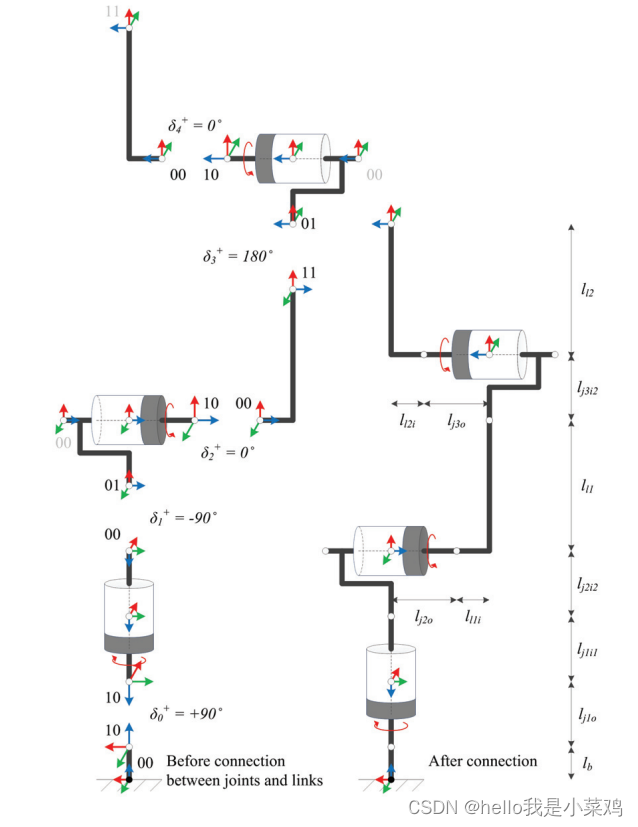
机械手可以利用转动关节的坐标框架和相邻关节或连杆之间的连接信息进行配置。图8为TR:R配置的连接示例,由一系列型和
型接头以及上下连接组成。冒号“:”用于区分肩关节和肘关节或肘关节和腕关节。在此图中,可以找到两个连接模块直接连接,没有任何链接模块。为了实现这种直接连接,连接机制的无性别设计非常重要,可以实现正向或反向耦合的连接方向,并且可以定期连接方向。本文在[4]中提出了一种改进的设计,在没有任何继电器PCB的情况下显示无性连接。
4. 模块间的连接机制
4.1. 机械连接
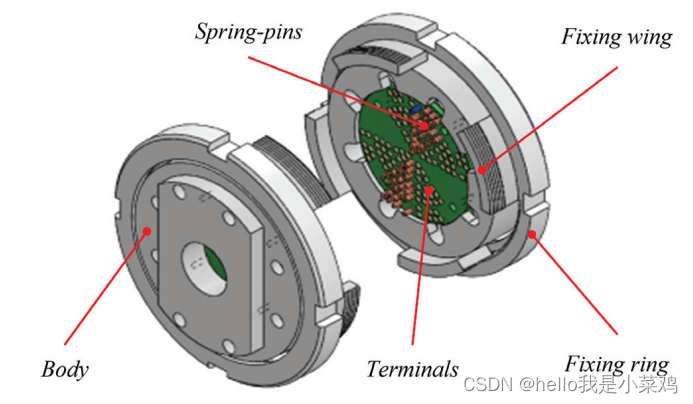
在本节中,将介绍两个关节和/或连杆模块之间的机械连接。图9详细显示了连接机制的等距视图。每个连接面都具有对称结构。固定环为内螺纹锁紧环。四个固定翼,这是外部螺纹突出的牙齿,帮助在两个模块之间的对齐通过四种类型的90◦间隔的相对位置。它在相对连接器的固定翼之间重叠在身体上。然后,将固定翼的外螺纹与对面连接器的固定环的内螺纹连接。使用相对固定翼将两个连接面进行对中接触后,通过拧紧两个主体,沿相对固定翼的螺纹旋转每个内螺纹固定环,使其牢固结合,如图10所示。

4.2. 通信和电源总线的电气连接
为了尽量减少对接头配置或模块之间连接关系的依赖性,不仅要进行机械连接,还要通过通信和电源总线通过相对位置进行电气连接。
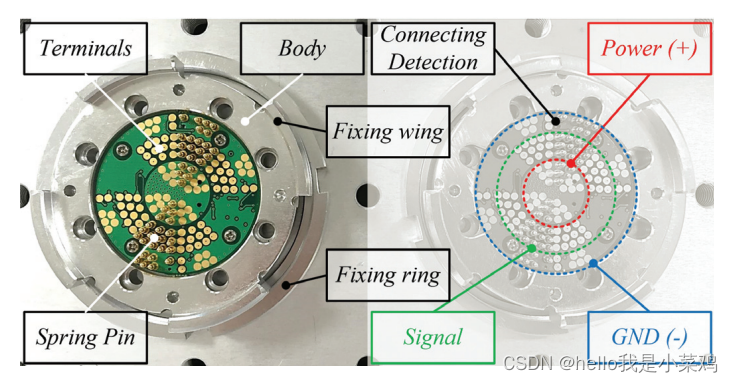
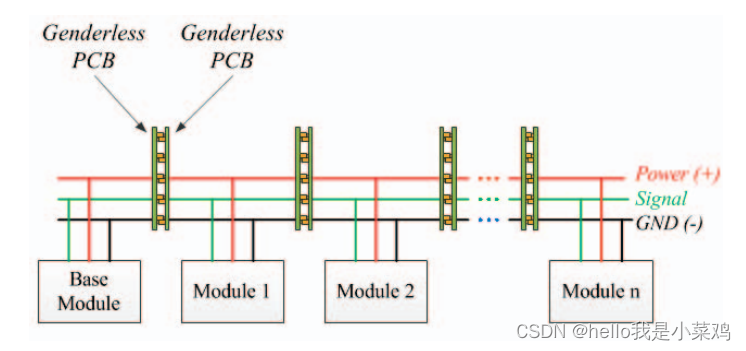
图11为电气连接的无性PCB通信和电源总线设计。该PCB由三组弹簧引脚和端子组成。三组弹簧引脚从中心向外依次与电源(红色圈内10个引脚)、信号(绿色圈内24个引脚,蓝色圈内2个引脚)、GND(蓝色圈内10个引脚)相关。数据可以通过多种通信方式同时传输,包括EtherCAT(6针)和can(3针)。PCB上的弹簧引脚信号组由两个对称三角形组成。剩余的引脚保留用于将来的其他通信。信号的两种对称布局的冗余使电气连接即使在很强的弯曲力作用下也能保持稳定。
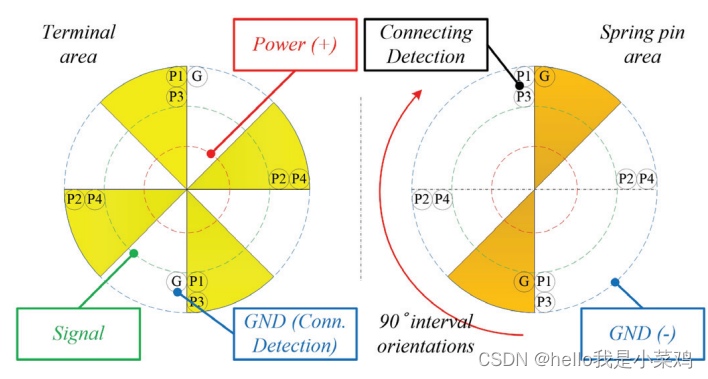
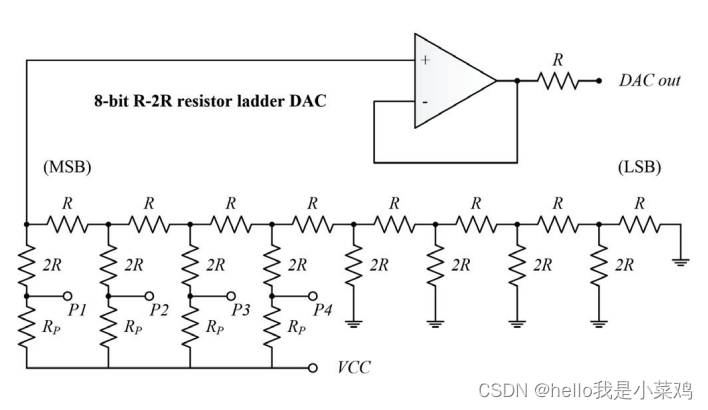
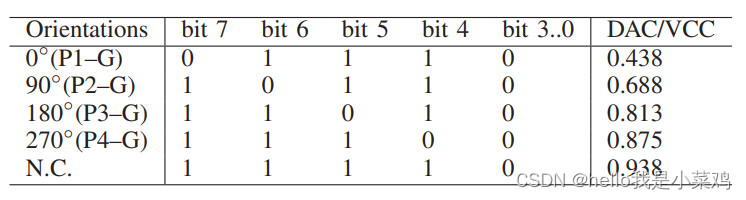
为了便于理解两个相邻的无性别连接器之间的连接方向,图12显示了左侧的终端区域和右侧的弹簧引脚区域作为简化的PCB模型。让我们以90度的间隔旋转右侧,并沿中线折叠两侧,就像折叠一样。在12和6点钟方向的两个引脚连接到GND,以识别两个连接器之间的方向。相邻两个连接机构在一个方向耦合时,P1 ~ P4中只有一个接GND,设为0。然后,确定连接方向。然而,当两个机构不连接(nc)时,从P1到P4的所有机构都被上拉电阻浮动并设置为1。因此,该机制的耦合可以用总共五种状态来表示。图13和表1给出了R-2R阶梯网络设计的DAC(Digital to Analogy Converter,数模转换器)电路及其连接检测输出结果。为了增加方向之间的电压电平差,将下4位设置为0,并使用上4位。图14显示了相邻两个模块之间的电气连接是如何从基模块串联进行的。
5.讨论
发达的无性别连接机制具有许多可取的品质。这种改进的模块连接机制的第二个版本被称为ModMan 2(模块化机械手系统2)连接器。该连接机构与以往具有2类机器人模块化的研究相比,具有良好的四向机电连接无性别特性。虽然Thor连接器[2]有8个方向,但机械连接是通过8个孔和螺钉建立的。ModMan 2连接器与SEA Snake[5]、Thor[2]、robot Toy[6]等其他连接器相比,可以分配更多的弹簧引脚和端子进行电气连接,并通过20个引脚向连接的相邻模块输送48V的大功率和20A的大电流。尤其是像robot Toy[6]这样内置电池的系统,其模块的尺寸和体积受到限制。RMMS[7]连接器具有30个引脚,具有电源和信号,但是可以提供6A的低电流。此外,由于有许多分配的信号引脚和每26个引脚的终端,因此可以通过几种类型的通信传输和接收数据。在今后的工作中,通过将两个连接件并排连接,在一个连接件的对面安装悬臂梁的一侧施加载荷,对扭转和弯曲强度进行定量实验。
6. 结论
该无性别连接机构是解决机械手结构多样化的一种方案。从实用角度来看,它可以承受模块之间的高功率,并且比以前的作品传递更多的信号,其机制是无性别的。介绍了机械/电气连接机构的设计方法。本文特别介绍了利用电路板上的弹簧引脚设计通信和电源总线。目前正在进行的工作是寻找最佳的弹簧引脚位置,以增加电流的传输和信号的数量。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









