摘要生成于 C知道 ,由 DeepSeek-R1 满血版支持, 前往体验 >
立减 ¥
请填写红包祝福语或标题
红包个数最小为10个
红包金额最低5元
抵扣说明:
1.余额是钱包充值的虚拟货币,按照1:1的比例进行支付金额的抵扣。 2.余额无法直接购买下载,可以购买VIP、付费专栏及课程。










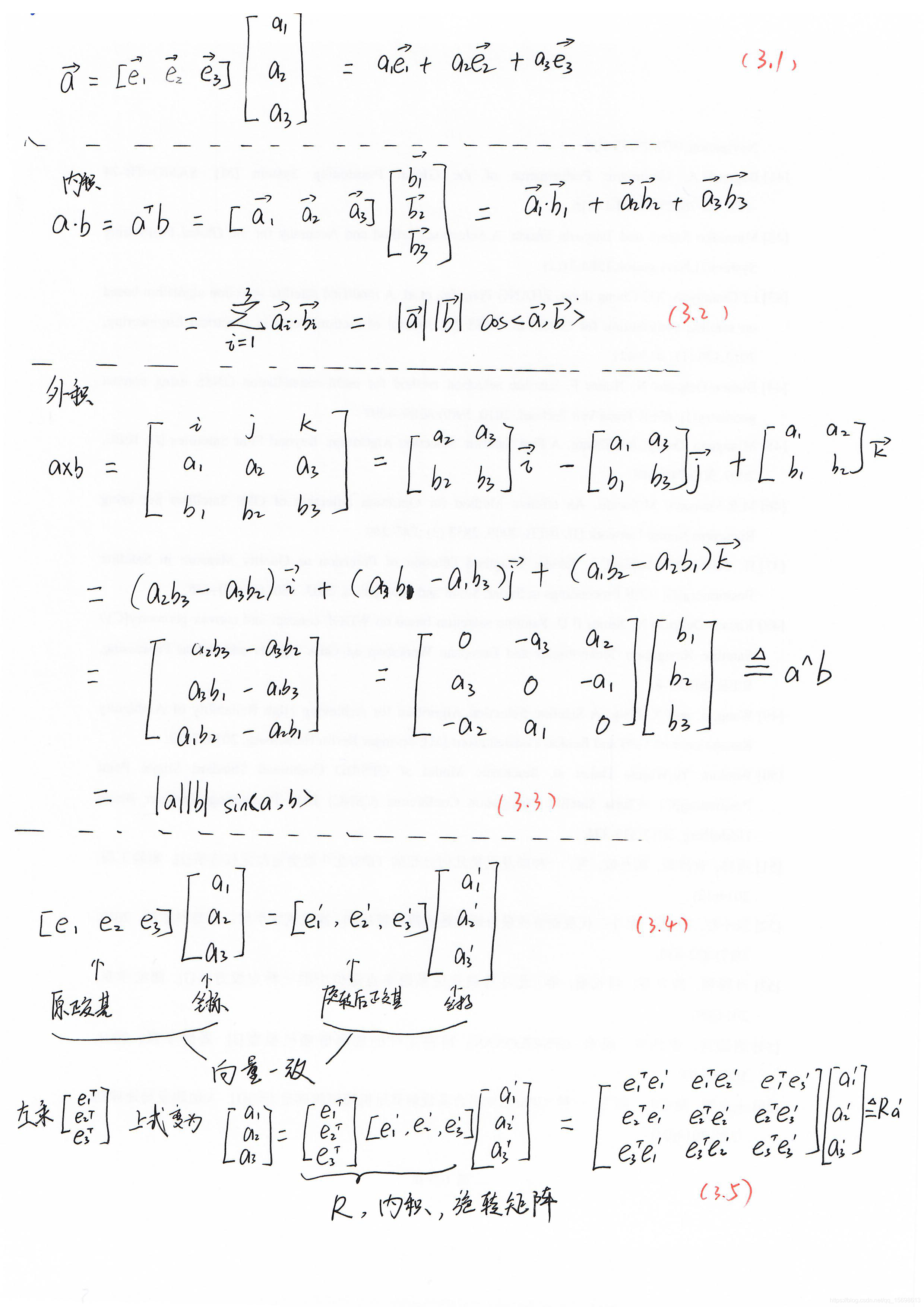
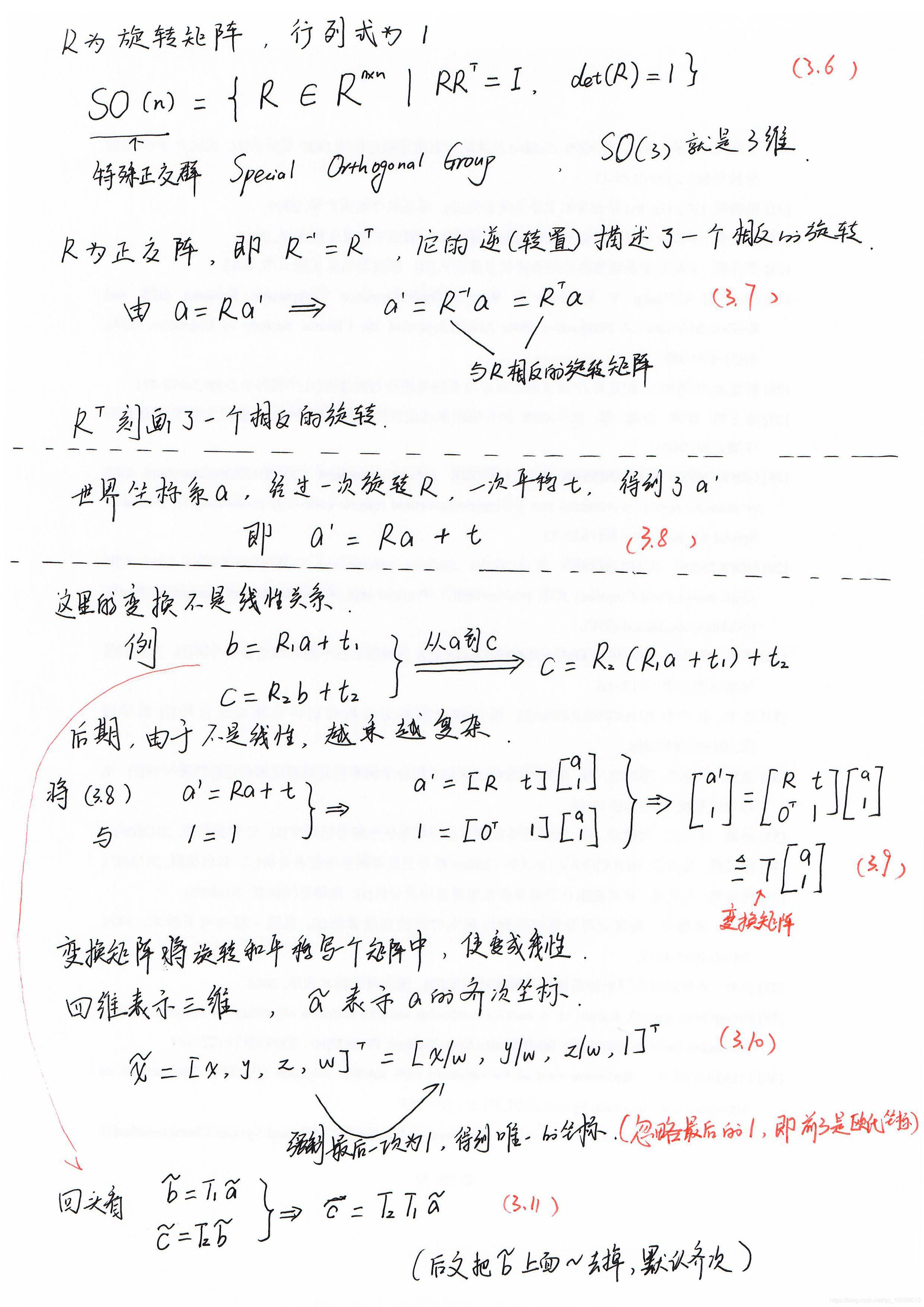
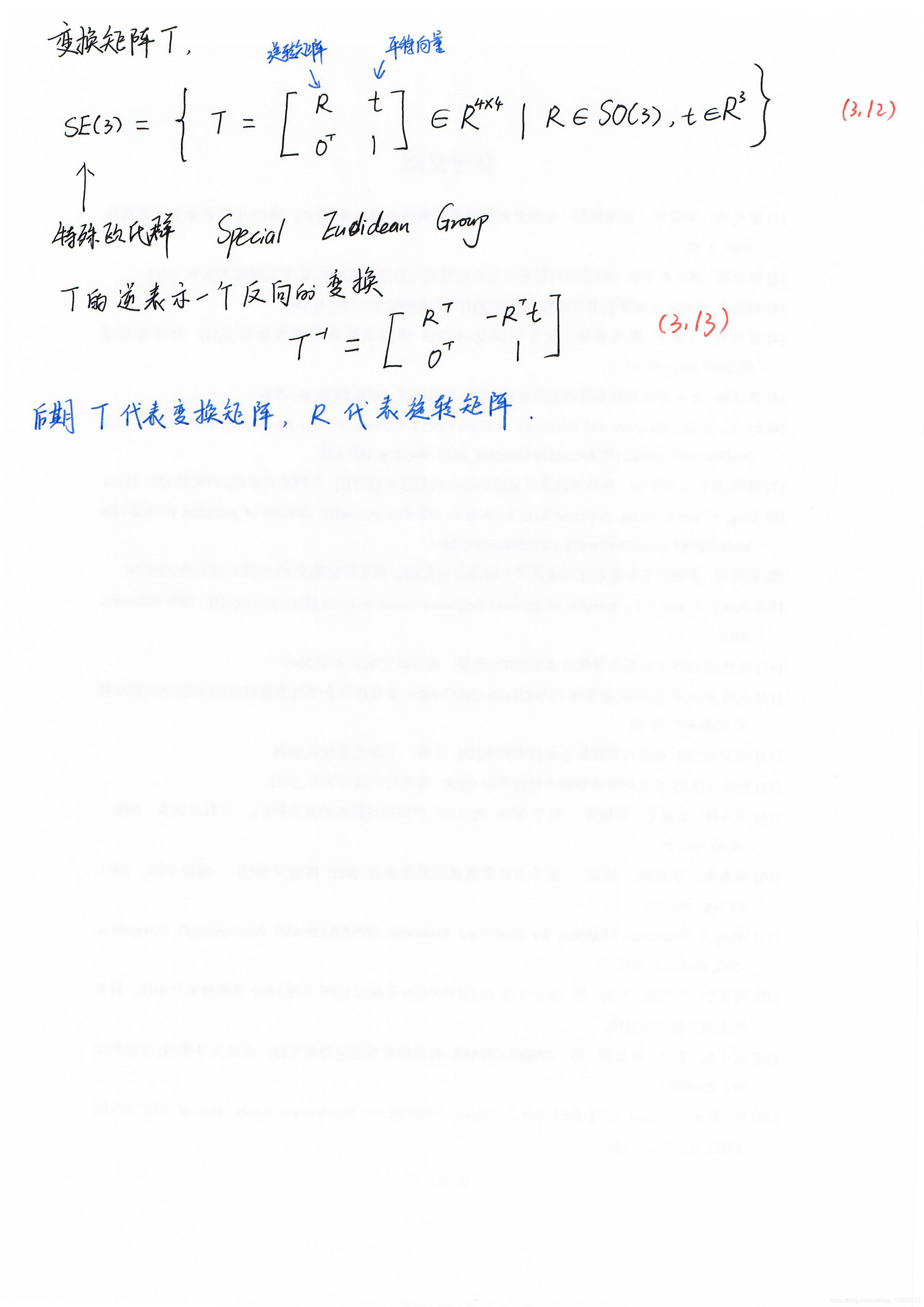
 博客涉及SLAM相关内容,重点在于公式推导,虽未给出具体内容,但可知围绕SLAM领域的公式展开研究与阐述,属于信息技术中AI音视频处理范畴。
博客涉及SLAM相关内容,重点在于公式推导,虽未给出具体内容,但可知围绕SLAM领域的公式展开研究与阐述,属于信息技术中AI音视频处理范畴。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1101
1101





