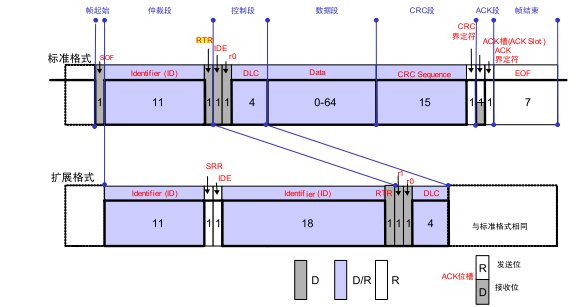
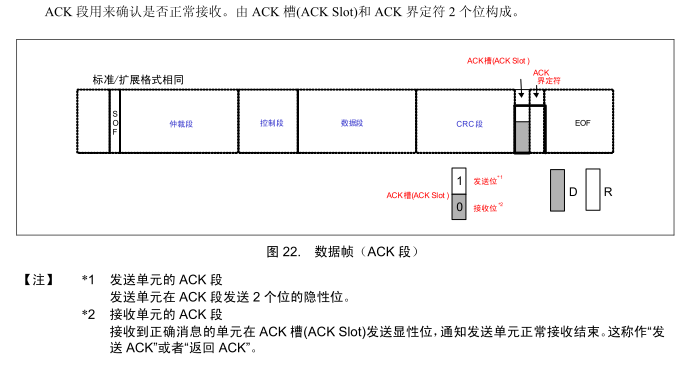
CAN通信ACK机制 如下是CAN数据帧的组成,可以看到在CAN数据帧中包含一个ACK段,而ACK段的作用就是表示该数据帧被正常接收。 ACK检测机制 CAN的错误帧中有一种就是ACK错误,ACK错误由发送方负责检测,发送方在ACK段发送2个隐性位,接收发收到该帧时将ACK槽置为显性位(ACK应答),由于“线与“原则,ACK段会由”01“组成,发送方在发送CAN帧时同时监听总线,如果发生方在ACK槽中检测出隐性电平就会检测出ACK错误(由于没有接收方在ACK槽填充),同时会发出ACK错帧帧。 ACK应答原理 接收方收到隐性“1”的ACK槽后,通过Tx引脚将其置为显性“0”。在这个过程中:<








 超级会员免费看
超级会员免费看
 本文详细介绍了CAN通信的ACK机制,包括ACK检测和应答原理。同时,深入讨论了AUTOSAR中与CAN通信相关的TxConfirmation和RxIndication,阐述了它们在CAN发送和接收中的作用,以及中断和查询两种工作模式的应用。
本文详细介绍了CAN通信的ACK机制,包括ACK检测和应答原理。同时,深入讨论了AUTOSAR中与CAN通信相关的TxConfirmation和RxIndication,阐述了它们在CAN发送和接收中的作用,以及中断和查询两种工作模式的应用。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3486
3486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








