









原文链接: CVPR 2023 | Azimuth Super-Resolution for FMCW Radar in Autonomous Driving
CVPR 2023 | Azimuth Super-Resolution for FMCW Radar in Autonomous Driving
毫米波雷达成像论文阅读笔记:CVPR 2023, Azimuth Super-Resolution for FMCW Radar in Autonomous Driving
- Y.-J. Li, S. Hunt, J. Park, M. O’Toole, and K. Kitani, “Azimuth Super-Resolution for FMCW Radar in Autonomous Driving”.
0 Abstract
-
解决了 FMCW MIMO mmwave radar的低角度分辨率问题
-
背景
- mmwave radar通常仅10根天线左右,角度分辨率很低
-
解决方案:
-
1 提出了ADC-SR (ADC数据超分辨模型):使用来自少数接收器的信号预测额外的信号
✅ 特点:与baseline相比性能相当,但参数减少50倍
-
2 将ADC-SR与标准的RAD超分辨模型结合,获得混合超分辨率模型 (Hybrid-SR)
✅ 性能可以大幅提高
-
-
实验结果
- 在Pitt-Radar数据集和RADIAI数据集上进行了实验:证明了ADC超分辨的重要性
- 检测结果:mAP提升约4%
-
代码/数据链接:link
1 Introduction
P1: mmwave雷达的优势和挑战
- 优点:自动驾驶中,应对恶劣天气
- 缺点:角度分辨率低 (受天线尺寸/成本限制)
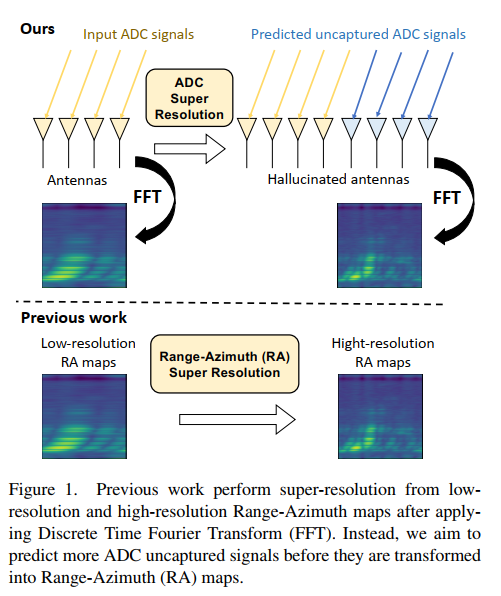
P2: 直接对ADC进行超分辨的动机
- RA / RAD图仅保留了幅度信息,无法体现element之间的关系信息
- 缺少直接处理ADC数据提升分辨率的工作
P3: 本文的贡献
- 直接对ADC天线数据进行超分:
- 预测额外的天线的信号
- 从而提升角度分辨率
- ADC-SR模型能够与现有RAD-SR模型结合,大幅提升成像性能
- 实验表明:所提出方法能够提升自动驾驶下游任务的性能
贡献点总结
- 提出了ADC-SR模型,能够从少数天线的信号预测额外的天线的信号
- 提出了Hybrid-SR模型,将ADC-SR模型与现有的RAD-SR模型结合
- 制作了Pitt-Radar数据集,包含了ADC信号
- 在下游任务上进行测试,提升了检测性能
2 Related Work
2.1 Radar方位角 super-resolution
- 传统方法:
- 将方位角看作 目标分布 和 天线方向图 的 卷积 ⇒ \Rightarrow ⇒ 解卷积方法 (维纳滤波、截断SVD, Tikhonov正则化,Richardson–Lucy,IAA)
- 正则化约束 ⇒ \Rightarrow ⇒ 分裂 Bregman 算法 (SBA), 稀疏正则化
- 深度模型
- GAN: 微多普勒图像超分辨率
- UNet: 雷达天气图
- 但现有方法/网络都是对RA图/FFT超分辨,很少直接对ADC信号超分辨
2.2 Radar for autonomous driving
- 类型1:MIMO配置雷达数据集
- 有速度特征
- 但角度分辨率低
- 类型2:扫描配置雷达数据集
- 角度分辨率高
- 但是没有速度特征
- 本文:提升MIMO雷达的角度分辨率,同时保留速度特征
3 Radar Datasets
3.1 Current datasets
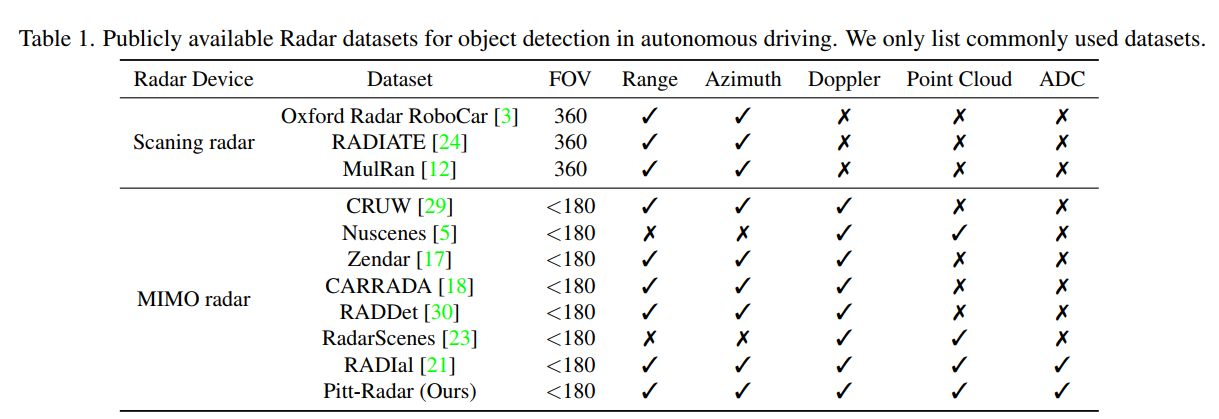
- 两种类型:
-
扫描雷达:不提供速度信息,但是角度分辨率高 —— 直接给出RA图,无ADC
✅ 高分辨率 + 360FOV
❌ 无多普勒特征 / ADC信号,仅有RA图
-
MIMO雷达:提供速度信息,但是角度分辨率低 —— 可提供ADC
✅ 有多普勒特征
❌ 但只有RADIaI提供了ADC
-
总结如下表
-
- 扫描雷达
- 高分辨率 + 360 FOV
3.2 Pitt-Radar Dataset
-
地点 :Pittsburgh, PA, USA
-
平台 :Lexus SUV
-
传感器
- 立体摄像头: 15Hz
- 激光雷达: 10Hz
- 高精度GPS: 25Hz
- TI AWR 1843 BOOST: 30Hz
-
包含高精度时间戳,离线同步
-
与RADIAI的区别:
- 雷达使用了多种不同的设置 (e.g., 128/256/512 samples per chirp)

4 The Proposed Approach
4.1 Problem Formulation and Overview
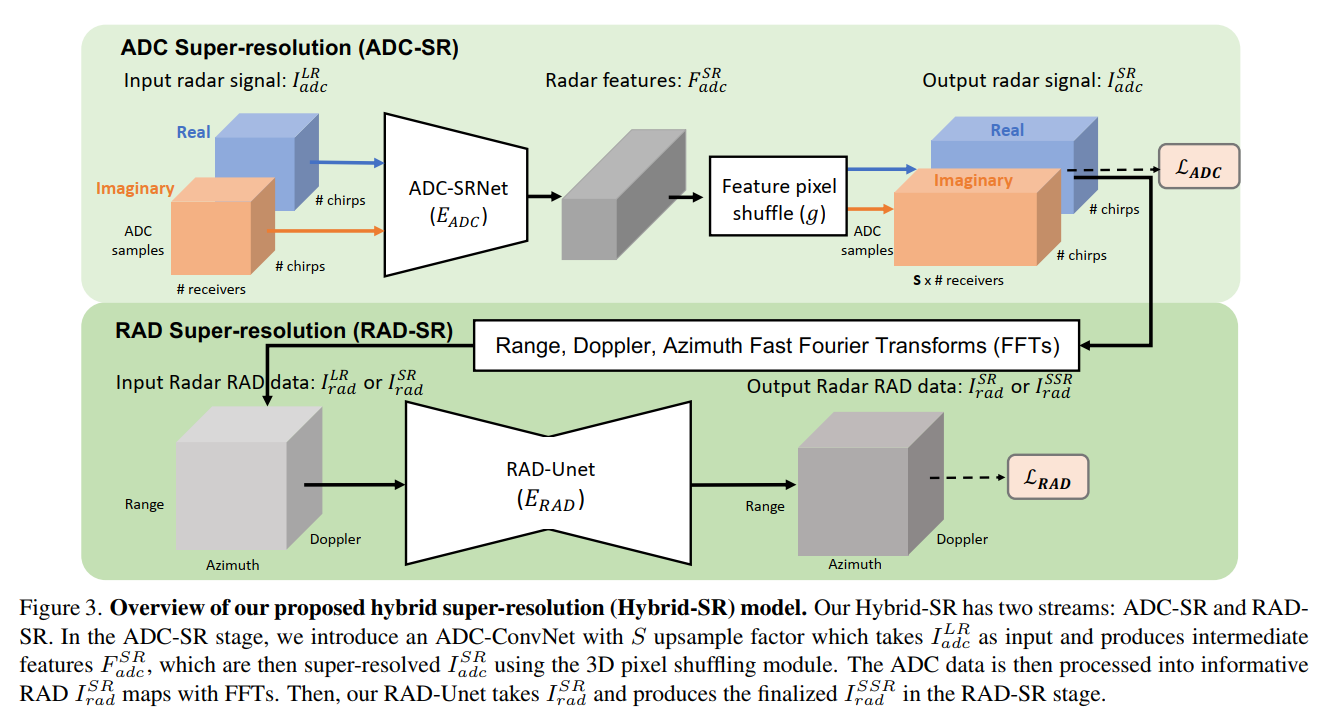
- 总的框架:Hybrid-SR, 包括两个部分:
- ADC-SR: 从少数天线的信号预测额外的天线的信号
- RAD-SR: 从RAD图预测高分辨率的RAD图
- ADC-SR
- 输入:少数天线的信号 I A D C ∈ C N r e c × N c h i r p × N a d c I_{A D C} \in \mathbb{C}^{N_{r e c} \times N_{c h i r p} \times N_{a d c}} IADC∈CNrec×Nchirp×Nadc
- 目标输出:来自更多接收天线的ADC信号: I A D C S R ∈ C N r e c ∗ × N c h i r p × N a d c I_{A D C}^{SR} \in \mathbb{C}^{N^{*}_{r e c} \times N_{c h i r p} \times N_{a d c}} IADCSR∈CNrec∗×Nchirp×Nadc
- 网络:ADC-ConvNet
- RAD-SR
- 输入:RAD图 I R A D ∈ C N R a n g e × N A z i m u t h × N D o p p l e r I_{R A D} \in \mathbb{C}^{N_{Range} \times N_{Azimuth} \times N_{Doppler}} IRAD∈CNRange×NAzimuth×NDoppler
- 目标输出:高分辨率的RAD图 I R A D S R I_{R A D}^{SR} IRADSR
- 网络:RAD-Unet
Note: 可单独apply Hybrid-SR, ADC-SR, RAD-SR以提升分辨率
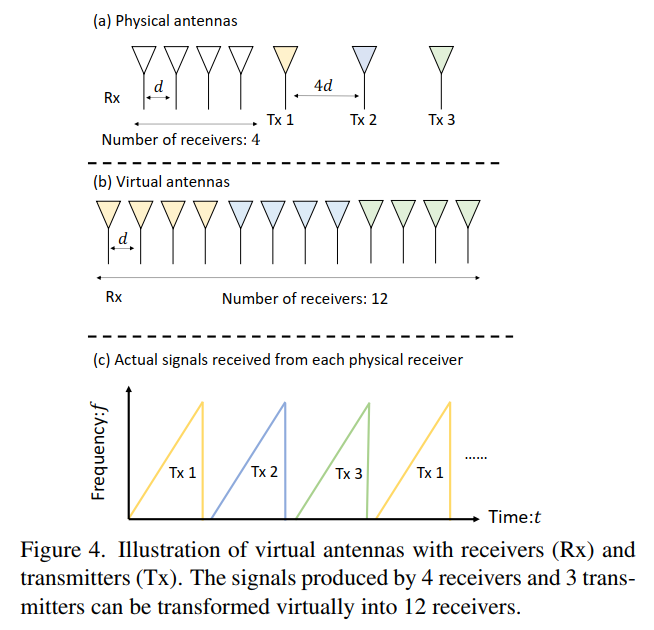
4.2 Downsanpling by removing transmitters
-
数据集生成方式
- 从MIMO雷达接收数据 $I_{A D C}^{SR} $中,去掉一些接收天线的数据 获得 $I_{A D C}^{LR} $
-
根据MIMO采样理论 (论文中说法是
the FOV depends on the distance between each receiver (density of the receivers) [11], the density needs to be the same after removing the receivers.)- ⇒ \Rightarrow ⇒ 应该去掉下图TX1或TX3对应的接收信号
4.3 Azimuth super-resolution from ADC signals
- 相比于traditional image SR, ADC SR更加困难:
- 1 信号是复数
- 2 恢复missing signals和 classical pixel upsample 是完全不同的
- 解决方法:
- 1 复数 ⇒ \Rightarrow ⇒ 将实部 和 虚部 视作 两个channel
- 2 使用 ADC-SRNet ( E A D C E_{ADC} EADC), 输出 F a d c S R = E A D C ( I a d c L R ) ∈ F_{a d c}^{S R}=E_{A D C}\left(I_{a d c}^{L R}\right) \in FadcSR=EADC(IadcLR)∈ R 2 ∗ S ∗ N r e c × N c h i r p × N a d c \mathbb{R}^{2 * S * N_{r e c} \times N_{c h i r p} \times N_{a d c}} R2∗S∗Nrec×Nchirp×Nadc (S为upsampling factor)
- 3 使用pixel shuffling function g g g to reshape the F a d c S R F_{a d c}^{S R} FadcSR into $I_{A D C}^{SR} : ∗ ∗ < f o n t c o l o r = g r e e n f a c e = " C o m i c S a n s M S , S T X i n w e i " > : **<font color=green face="Comic Sans MS, STXinwei"> :∗∗<fontcolor=greenface="ComicSansMS,STXinwei">\Rightarrow$** I a d c S R = g ( E A D C ( I a d c L R ) ) ∈ C S ∗ N r e c × N c h i r p × N a d c I_{a d c}^{S R}=g\left(E_{A D C}\left(I_{a d c}^{L R}\right)\right) \in \mathbb{C}^{S * N_{r e c} \times N_{c h i r p} \times N_{a d c}} IadcSR=g(EADC(IadcLR))∈CS∗Nrec×Nchirp×Nadc
- 损失函数:
- L A D C = L 2 ( g ( E A D C ( I adc L R ) ) , I a d c H R ) \mathcal{L}_{A D C}=\mathcal{L}_2\left(g\left(E_{A D C}\left(I_{\text {adc }}^{L R}\right)\right), I_{a d c}^{H R}\right) LADC=L2(g(EADC(Iadc LR)),IadcHR),
4.4 Azimuth super-resolution from RAD maps
-
I r a d I_{rad} Irad的定义:
- I r a d = ∥ F F T s ( I a d c ) ∥ ∈ I_{r a d}=\left\|F F T s\left(I_{a d c}\right)\right\| \in Irad=∥FFTs(Iadc)∥∈ R N Range × N Azimuth × N Doppler \mathbb{R}^{N_{\text {Range }} \times N_{\text {Azimuth }} \times N_{\text {Doppler }}} RNRange ×NAzimuth ×NDoppler
-
具体步骤:看作一个3D image to 3D image 的工作
- 网络:RAD-Unet ( E R A D E_{RAD} ERAD)
- I r a d S R = E R A D ( I rad L R ) ∈ R N Range × N Azimuth × N Doppler I_{r a d}^{S R}=E_{R A D}\left(I_{\text {rad }}^{L R}\right) \in \mathbb{R}^{N_{\text {Range }} \times N_{\text {Azimuth }} \times N_{\text {Doppler }}} IradSR=ERAD(Irad LR)∈RNRange ×NAzimuth ×NDoppler .
-
损失函数: L R A D = L 2 ( E R A D ( I rad L R ) , I rad H R ) \mathcal{L}_{R A D}=\mathcal{L}_2\left(E_{R A D}\left(I_{\text {rad }}^{L R}\right), I_{\text {rad }}^{H R}\right) LRAD=L2(ERAD(Irad LR),Irad HR),
- 混合模型 Hybrid-SR: combining ADC-SR and RAD-SR
- I r a d S S R = E R A D ( ∥ F F T s ( I a d c S R ) ∥ ) I_{r a d}^{S S R}=E_{R A D}\left(\left\|F F T s\left(I_{a d c}^{S R}\right)\right\|\right) IradSSR=ERAD( FFTs(IadcSR) ), while I rad S R = ∥ F F T s ( I a d c S R ) ∥ ∈ R N Range × N Azimuth × N Doppler I_{\text {rad }}^{S R}=\left\|F F T s\left(I_{a d c}^{S R}\right)\right\| \in \mathbb{R}^{N_{\text {Range }} \times N_{\text {Azimuth }} \times N_{\text {Doppler }}} Irad SR= FFTs(IadcSR) ∈RNRange ×NAzimuth ×NDoppler .
- 损失函数: L Hybrid = L A D C + L R A D \mathcal{L}_{\text {Hybrid }}=\mathcal{L}_{A D C}+\mathcal{L}_{R A D} LHybrid =LADC+LRAD.
- 分析:
- ADC-SR更有效
- RAD-SR对应的输入更加鲁棒
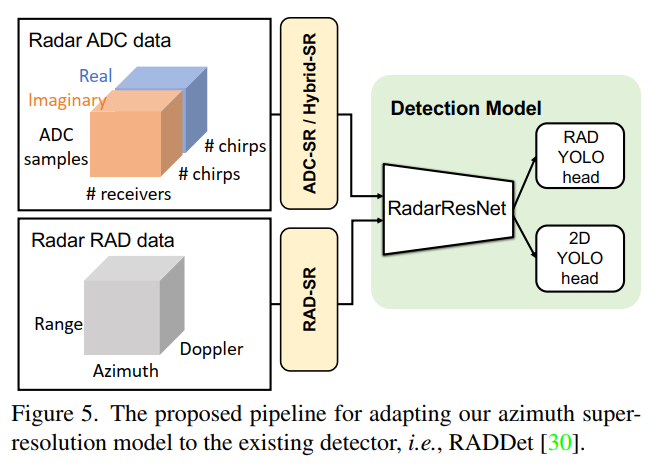
4.5 Adapting our model to object detectors
- 使用现有网络 (RAD-Det) 进行目标检测
5. Experiments
5.1 Datasets
- 训练和测试:
- Pitt-Radar: 10000 ADC with 3T4R (5000 training 5000 testing)
- RADIal: 25000 ADC with 3T4R (the first 5000 for training, the second 5000 for testing)
- 目标检测
- RADDet: 3D RAD annotation
5.2 Settings and evaluation protocols
-
Azimuth super-resolution
- LR: only T2
- SR: T1, T2, T3
- 评价指标:PSNR, MSE
-
Object detection
- apply the super-resolution model on the RadarResnet detector proposed by RADDet
- 评价指标:mAP with different IOU
5.3 Implementation details
- ADC samples
- 128 / 256 / 512
- lr: 0.001
- batch size: 4
- 2080 Ti
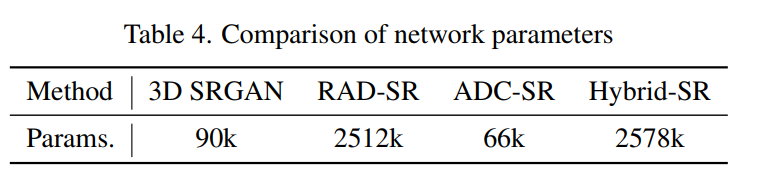
5.4 Results and comparisons in super-resolution
-
RA maps (表2)
- 现有的强二维图像超分辨率模型,如 SRGAN 或 Unet 无法对RA map进行超分辨率
- 3D SRGAN 将 RAD 图作为输入,但与 RADSR 相比,它仍然无法重建 2D RA 图 ⇒ \Rightarrow ⇒ 说明该任务更像 image to image, 而不是上采样超分
- ADC-SR 实现了与 RAD-SR 相当的性能,而我们的混合 SR 组合 ADC-SR 通过考虑 ADC 信号表现出卓越的重建性能。 这表明使用 ADC-SR 可以改善重建结果。
-
RAD maps (表3)
- 3D SRGAN fails to reconstruct the RAD maps
- ADC-SR + RAD-SR in Hybrid-SR >> RAD-SR (ADC-SR 可以改善重建结果)
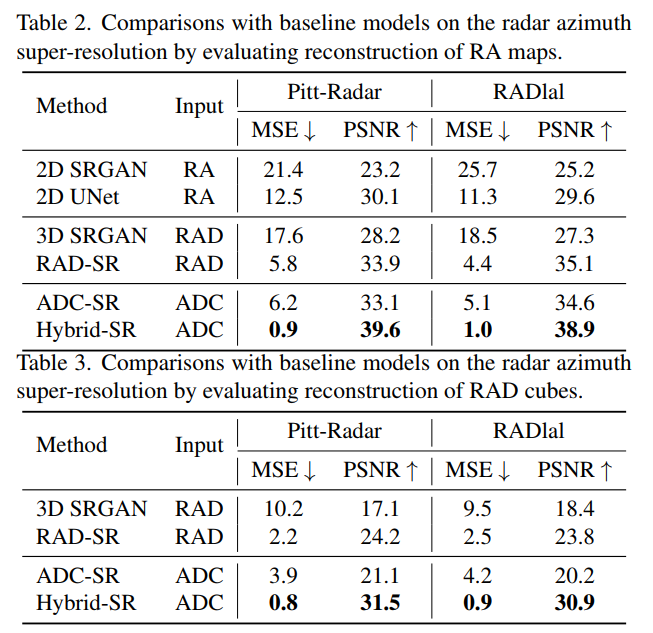
- 参数量比较
- ADC-SR最小
5.5 Results and comparisons in object detection
- 如表5表6所示
- 使用IFFT获得原始ADC信号
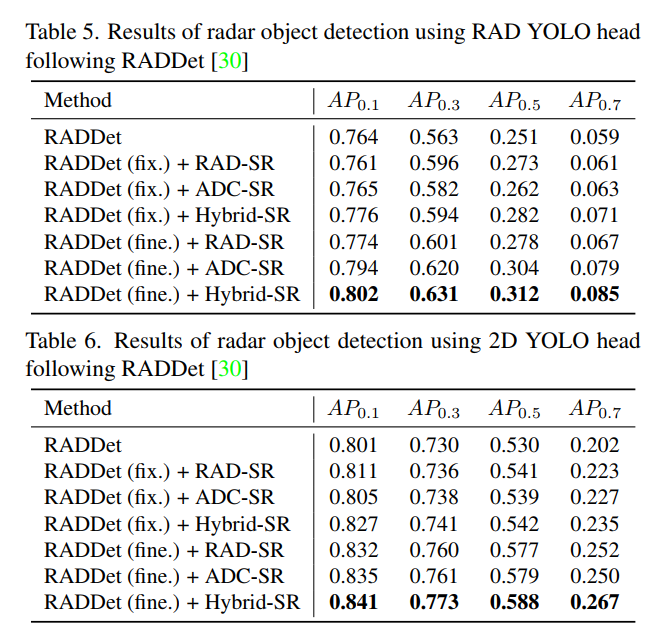
-
结果
- 1 directly plugging in our models without fine-tuning the detector already brings performance gains
- 2 fine-tuning the detector further improve the performance by a large margin
-
结论
- 所提方法有效
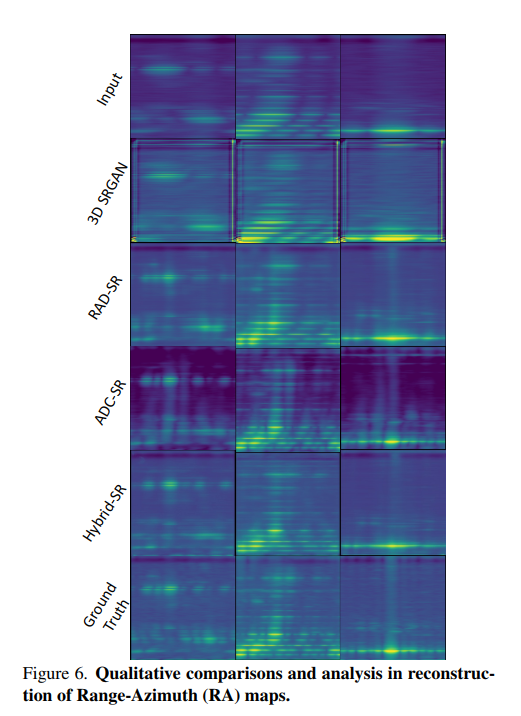
5.6 Visualization of RA maps
- 效果明显
- 如下图所示
6. Conclusion
- ADC-SR + RAD-SR ⇒ \Rightarrow ⇒ Hybrid-SR
- Pitt-Radar



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











