



谈论任务进度:迈向将任务规划与对话相结合的 辅助机器人服务
摘要
在家庭环境中使用服务机器人协助老年人,有望 帮助人们保持独立性,提升其健康水平和生活质量。在 许多辅助应用中,机器人会代表用户执行任务,而用户 往往无法或不愿直接监控这些任务的执行过程。因此, 向用户提供有关任务进度的有用且恰当的信息至关重要。
在家庭及其他现实环境中接受帮助的人们,在等待服务 期间很可能正忙于其他活动,因此信息也应以适当且非 侵入性的方式呈现。本文介绍了一项人机交互实验,研 究人们更倾向于接收服务机器人关于分布式辅助服务的 何种类型的口头更新反馈。结果表明,相较于任务进度 中的事件信息或无反馈,人们认为有关任务完成前剩余 时间的反馈更有用。我们还讨论了未来研究方向,即当 出现延迟或故障而需要重新规划或修改目标时,如何让 非专业用户更多地参与到任务规划过程中。
关键词
:人机交互,社交机器人,任务规划与执行,语音,服务机器人
1 引言
为了使辅助机器人服务能够被广泛采用,它们必须可供具有 不同技术水平的非专家使用。这引发了一些新的问题
关于如何向用户告知这些复杂系统的功能。随着全球许 多国家老年人口不断增加,人们越来越关注并加大投资, 利用机器人技术为老年人提供帮助,以支持和改善他们 的生活质量。这些努力大多集中在某些类型的辅助服务 上,使老年人在年老时仍能继续独立生活在自己的家庭 中。其中一个名为ROBOT‐ERA的项目,旨在通过一组 协作机器人提供清洁和送餐等日常服务来协助老年人。
该组中的每个机器人被设计用于在特定环境中运行,包 括家庭、共享室内空间或户外。该系统由环境智能技术 支持,并由中央规划器进行协调。在执行这些服务期间, 位于家庭中与人在一起的机器人通常并不是当前代表用 户执行服务阶段的机器人。然而,通过中央规划器,该 机器人可以获取涉及其他机器人的任务进度信息,以及 服务可能完成时间的准确估计。在这种情况下,机器人 应向用户告知哪些关于任务进度的信息?
由于家庭中的辅助机器人将由非专家使用,因此人 们能够以直观且易于理解的方式与之交互至关重要。用 户通过多模态语音和平板电脑界面与ROBOT‐ERA机器 人进行交互[3, 4]。在意大利和德国针对老年人开展的焦 点小组研究旨在指导ROBOT‐ERA服务的设计,结果发 现人们更倾向于通过语音方式与机器人交互,而非其他 方式[5]。此外,如果用户正在从事其他活动而未使用平 板电脑,则可能错过通过平板电脑提供的更新信息。基 于这些原因,本研究重点关注口头更新。
本文中,我们通过一项涉及模拟送餐服务的人机交 互实验来探讨这些问题。比较了人们对口头反馈中关于 任务进度的不同类型信息的 人们的印象。我们评估了反 馈偏好
根据人们认为信息的有用性和信息量,以及是否满足了 他们对交互的期望来进行评估。人们更偏好了解任务完 成前剩余的时间,这支持了我们的假设,即用户希望获 得直接影响他们的信息,同时不希望被服务执行细节所 困扰。尽管本次探索性实验的参与者并非老年人,但相 关文献在研究任务中断时发现,老年和非老年参与者具 有相似的反应。我们还计划通过进一步针对老年参与者 的实验来验证这些结果。在真实场景和环境中评估老年 人与服务机器人之间交互的质量,是ROBOT‐ERA项目 的关键目标,而此类聚焦的实验室实验有助于指导系统 的设计。最后,我们讨论了未来工作如何通过对话系统 与规划器之间更复杂的集成,使非专业用户能够在任务 执行失败时根据自身偏好协助修改或修复计划。
2 相关工作
在大多数关于服务机器人语音交互的研究中,对话通常涉及 交互中的机器人自身执行的任务,且机器人通常与正在与其 交谈的人处于同一位置。在Team Talk对话系统中,用户 指示一个机器人团队执行寻宝任务[6]。CoBot
是一个利用对话来支持其引导访客参加会议并提供本地 信息[7]任务的机器人。在这些示例应用中,机器人除了 提供有关任务的信息外,还使用语音交互向用户寻求帮 助,以协助任务规划或定位。鉴于ROBOT‐ERA服务的 辅助性质以及目标用户群体(可能缺乏技术使用经验并 存在轻微身体和认知障碍的老年人),该系统应能够在 不将用户置于任务执行关键位置的情况下自主提供服务, 避免给用户带来负担。人们可能希望了解正在代表他们 执行的服务的相关信息,但直接观察远程机器人的操作 会不必要地耗费时间且不方便。用户无需持续监控机器 人的进度,在等待服务完成时,他们更可能将注意力集 中在其他活动上。人们需要能够以最小干扰提供关于任 务进度重要上下文的信息。
从这个角度来看,机器人提供的信息更新与提醒代 理所提供的更新类型相关,因此有关任务中断的文献对 于设计这些更新具有参考价值。已有研究专门针对老年 用户在任务中断方面的情况,但这些研究涉及的是与环 境智能或虚拟代理的交互,而非物理机器人[8]。在与虚 拟代理的交互中,人们更倾向于包含社交和共情内容的 打断方式,这一偏好可能同样适用于机器人代理[9]。沃 诺克等人进行的一项关于多模态打断的研究发现,老年 用户对打断模态的反应与非老年用户相似,且所评估的 各种通知模态在任务中断方面的影响基本相同[10]。这表 明,最佳的打断模态可能取决于具体情境,而非某种特 定模态始终更优。
这些交互还与人在回路规划的研究相关。然而,目 前大多数针对机器人的人在回路规划研究都集中在支持 技术经验丰富的专家用户。规划任务可能要求用户在任 务的困难阶段向机器人提供低层控制 [11]。或者用户可 能需要亲自分配任务给机器人 [12]。正如我们上文所讨 论的,由于我们应用的辅助性质,将任务的困难部分转 移给用户是不可取的。理想情况下,对话系统应以直观 易懂的方式引导用户在必要时更改或修改计划,从而增 强用户对服务结果的控制能力。
讨论任务进度 | 113
在涉及人类与自动生成的规划交互的研究中,即使是经 验丰富的技术用户也难以理解这些规划 [13]。因此,当 规划失败或延迟时,如何让非专家参与重新规划成为一 个棘手的开放性问题。
3 系统
科罗(Coro)是为ROBOT‐ERA项目设计的室内移动机 器人之一,被用于本次实验。控制软件是为所有 ROBOT‐ERA机器人开发的系统[14]。针对所使用的简 化单机器人模拟送餐场景,进行了一些修改。规划器被 替换为一个脚本,该脚本在指定时间执行任务步骤(机 器人的动作和语音),以确保所有实验试验中的时间一 致性。
实验期间,参与者使用基于网页的界面订购服务 (详见迪努奥沃等人的描述)[4]。在完整的 ROBOT‐ERA服务中,与机器人的接口是多模态的,用 户还可以通过对话管理器向机器人发出语音指令。但在 本实验中未使用对话管理器,机器人仅产生语音输出。
与完整系统一样,采用Acapela语音即服务来合成机器 人的语音[15]。
4 实验
4.1 设计与流程
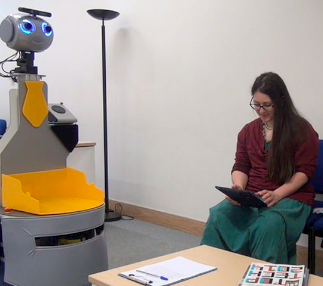
实验在普利茅斯大学校园内的一间教室中进行,该教室 被布置成模拟家庭环境。实验所使用的示例服务为送餐。
参与者被要求使用平板界面选择菜单选项并订购餐食以 进行交付。一旦他们订购了餐食,机器人便会执行预先 定义的言语行为及相应行为。实验设置如图1所示。
该实验采用被试内设计,包含三个条件:无反馈、 基于事件的反馈和基于时间的反馈。在所有条件下,参 与者均通过平板界面订购一顿餐食。五分钟后,机器人 前往房间门口,仿佛要收取送餐(本实验中并未实际进 行送餐)。当他们等待送餐时,参‐
与者可以阅读为他们提供的杂志。这是为了模拟在家庭 中订购并等待服务的情境,其中人的注意力可能集中在 休闲活动上。在体验每种条件后,参与者填写了一份简 短的问卷,其中包括对四个陈述的李克特量表回答。实 验结束时,参与者被要求通过强制选择来选出他们偏好 的条件。他们还被邀请写下对实验体验的评论。
机器人的言语行为根据条件的不同而有所变化,具体如下:
– 无反馈:机器人会告知参与者订单已下单。在试验结
束时,机器人会告知参与者他们的订单已到达。
– 事件反馈:除了与无反馈条件相同的陈述外,机器人还会在 参与者的餐品订单准备好并正在派送时告知参与者。
– Timefeedback:除了与无反馈条件相同的陈述外,机 器人还会向参与者提供其订单预计到达时间的估计。随 后,机器人会告知参与者,预计交付时间已发生变化。
参与者是从普利茅斯大学校园招募的非老年成年人,包 括来自大学各个院系的学生和工作人员。所有参与者此 前均无使用ROBOT‐ERA机器人或系统的经验。共有21 人参与了本研究(M=10,F=11)。其中一名用户的数据 显示未完整填写问卷,因此被排除。
4.2 结果
我们假设用户会更偏好基于时间的条件,而非其他两种 条件。这一假设源于我们应用领域的需求。在辅助服务 中,人们可能更关心任务何时完成,而对实现任务的详 细步骤不感兴趣。当服务在最少指导的情况下执行时, 用户应能自由地专注于其他事情。我们还认为,能够让 人预测服务何时完成的反馈比缺乏反馈更受青睐。尽管 更多的言语行为可能会带来更大的干扰或侵扰性,但我 们认为用户不会介意这些干扰。
114 |弗兰克·布罗兹、亚历山德罗·迪努沃、托尼·贝尔佩姆和安吉洛·坎杰洛西
只要它们能提供有用的信息。最后,我们感兴趣的是反 馈类型是否会影响人们对服务所需时间的期望。我们假 设,人们更倾向于获得一个预估时间(即使该预估之后 需要修正),而不是完全不了解任务何时完成。
我们设计了若干陈述,以根据言语行为的有用性、 信息量、适当性以及与参与者期望的匹配程度来评估参 与者对机器人在每种情境下言语行为的看法。关于适当 性和期望的陈述采用了反向计分,因此在分析时进行了 反向评分。尽管在我们的分析中并未将各个陈述的回答 进行合并,但这有助于更直观地解释结果,因为较高的 分数始终代表更积极的评价。
问卷陈述为:
– 有用性:“我觉得机器人关于交付的陈述很有用。”
– 信息量:“机器人向我提供了足够的关于交付到达时间 的信息。”
– 适当性:“机器人说话过于频繁。”(反向计分)
– 期望:“交付花费的时间比我预想的要长。” (反向计分)
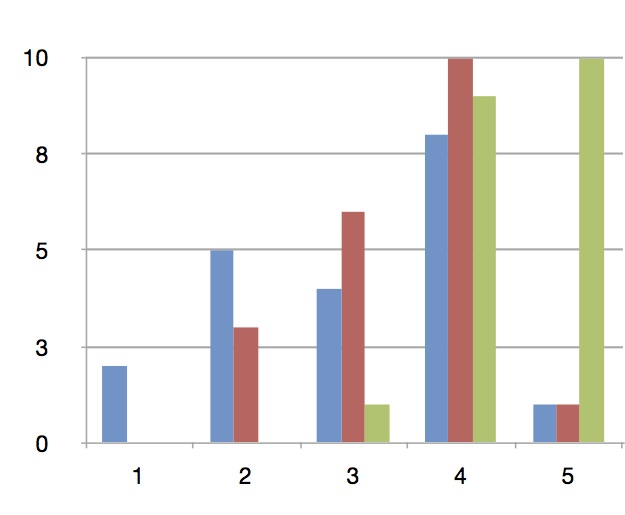
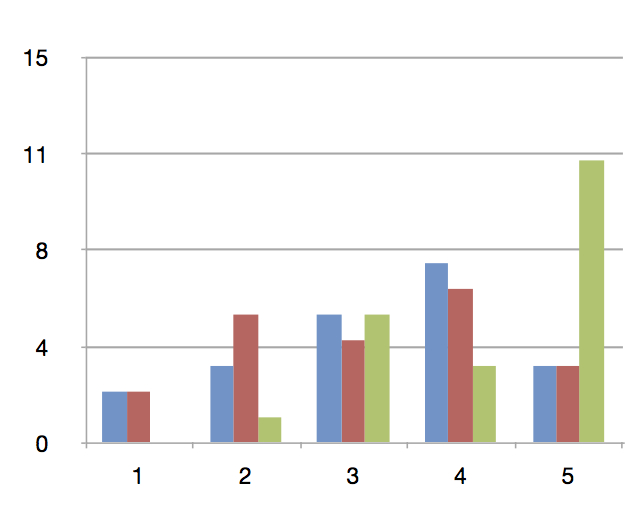
为了检验我们的假设,我们在时间反馈条件与其他两个 条件之间进行了预先设定的比较。所使用的度量是每条 陈述的中位数响应。我们将李克特量表的响应视为有序 数据,并在中位数不同的情况下使用威尔科克森符号秩 检验(精确)来检验统计显著性(见表2)。响应的分布 如图2所示。
4.2.1 有用性
时间反馈条件相比其他两个条件具有统计显著性地更受 偏好。参与者对于无反馈条件下机器人的语音的有用性 持中立态度。他们 somewhat同意基于事件的反馈有用, 并强烈同意基于时间的反馈有用。在他们的评论中(见 第4.2.5节),一些参与者建议他们希望同时接收事件反 馈和时间反馈,而另一些人则表示他们认为事件反馈没 有用。
事件反馈的有用性在任务执行被延迟或失败的情况 下可能会更高,因为它提供了更多关于系统当前状态的 信息。我们示例中的服务场景并未探讨这类规划和执行 困难,但我们认为这将是未来研究的一个有趣方向,我 们将在第5节中讨论这一点。
4.2.2 信息量
时间反馈条件在统计显著性上优于其他两个条件。参与 者强烈同意时间条件为他们提供了关于服务何时完成的 充分信息。而在其他条件下,他们的意见则略有分歧或 持中立态度。在事件反馈条件下,尽管参与者认为机器 人的语音有一定用处,但这并未帮助他们形成对服务完 成时间的估计。
谈论任务进度 | 115
4.2.3 适当性
在不同条件之间未发现具有统计学意义的差异。此陈述 旨在调查增加言语行为的数量是否会负面影响参与者对 机器人的看法。由于参与者在等待时专注于一项愉快的 活动(阅读杂志),机器人频繁的打断可能被视为社交 上不恰当、令人烦恼且具有干扰性的。但我们预计会发 现,机器人的语音不会被看作是不恰当的
只要所提供的反馈被认为是有用的,就是合适的。
在时间反馈条件下,机器人在五分钟内说了四次话; 在事件反馈条件下说了三次;在无反馈条件下说了两次。
在任何条件下,参与者均未认为机器人的语音量是过度 的。
116 |弗兰克·布罗兹、亚历山德罗·迪努沃、托尼·贝尔佩姆和安吉洛·坎杰洛西
4.2.4 期望
时间反馈条件相比其他两个条件更受参与者青睐,且具 有统计显著性。该陈述旨在衡量不同条件下呈现的信息 类型如何影响参与者对任务完成所需时间的先前期望 (在实验开始前,未向参与者提供有关每次试验所需时 间的任何信息)。用户强烈不同意在时间反馈条件下配 送花费的时间比预期长,而在其他条件下则持中立态度。
有可能向人们提供准确的等待时间估计会让他们更 加关注时间的流逝,从而感觉等待时间更长。然而,在 此情景中似乎并未出现这种情况。
4.2.5 自由评论和强制选择题
参与者被邀请在实验结束后可选择性地记录关于他们对 实验印象的自由评论。这些非结构化的反馈有助于了解 他们对与机器人交互过程中的偏好和印象。
参与者评论的交互方面之一是机器人的动作。机器 人在说话时会将身体转向参与者,而在通知间隙则会稍 微转离他们。一些参与者表示,机器人的动作使交互感 觉更加自然。这表明,在这些交互过程中,物理实体化 和动作影响了人们对机器人社交存在感的印象。这也是 使用机器人发送通知与使用平板电脑或计算机呈现相同 类型信息的不同之处之一。
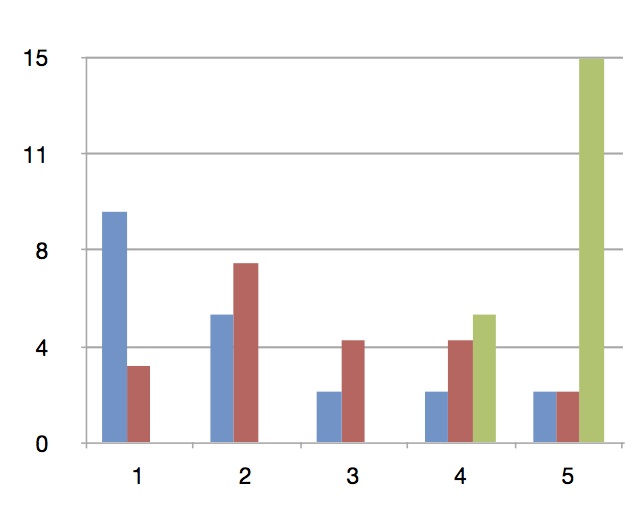
除了问卷陈述外,我们还要求参与者对其偏好的条 件做出强制选择,以确认问卷陈述结果。在强制选择中, 79%的用户更喜欢时间反馈,21%的用户更喜欢事件反 馈,没有用户选择无反馈(见图3)。有一名用户同时选 择了时间反馈和事件反馈,因其未按指示作答,该响应 被排除在结果之外。
参与者的评论进一步揭示了为何时间反馈条件更受 青睐。几位参与者的评论表明,他们更希望同时获得两 种形式的反馈(但本实验未评估这一条件),尽管其他
用户意见不一。例如,一位参与者写道:“我更喜欢带 有时间更新的试验,因为我并不真正关心食物何时准备 好交付,而只关心实际交付的时间。” 一位更倾向于基 于事件反馈条件的用户表示,希望机器人能告知用户下 一个通知将由什么未来的事件触发(例如,机器人可以 说明将在交付出发时通知他们)。如何以及何时结合时 间和事件反馈是未来研究的一个课题。我们假设,在计 划执行失败或延迟的情况下,事件反馈对用户而言将变 得更加有用。我们将在下一节中进一步讨论这一点。
5 未来工作
这是一项关于如何在辅助领域中为分布式机器人服务提 供任务进度通知的探索性研究,还有许多方向有待进一 步研究。最重要的是,本研究仅探讨了服务执行基本 “按计划”进行且无故障或延迟的情况(事实上,在我 们基于时间的反馈条件下,服务完成时间早于机器人最 初的估计)。当任务执行失败或服务严重延迟时,人们 可能希望获得更多信息或不同类型的信息。由于 ROBOT‐ERA中使用的规划器能够在执行过程中出现问 题时修复计划,因此有可能向用户告知这些变更情况。
一个规划器
谈论任务进度 | 117
了解用户信息需求的系统可能会在其计划中包含有关任 务进度的对话行为。
延迟和故障在现实世界的自主系统中很常见,如何 向人们传达这些情况是创建可接受且可解释的机器人行 为的重要部分。ROBOT‐ERA 所使用的基于约束的配置 规划器能够处理任务截止时间、有限资源和并发目标, 并支持准确估计任务完成时间 [16]。它还执行执行监控, 使系统能够检测当前计划是否以及何时变得无法实现。
由于所提供的服务直接影响到接受帮助的人员,因 此可以合理地预期,他们希望获得关于规划失败原因的 反馈,并能够提出应放宽哪些约束以找到可实现规划的 建议。但要找出规划无法实现的原因并非易事。向用户 提出一组简洁、合理且易于理解的可能放宽方案,作为 重新规划的选择,这一问题更为复杂,特别是因为辅助 技术的用户是非专家,他们可能(也不应需要)理解系 统的内部运作机制。
允许辅助机器人服务的用户对重新规划拥有更多控 制权,可以使这些机器人服务更易于被接受,因为这能 让用户根据自己的偏好选择替代方案。例如,如果延迟 会导致与另一项活动发生冲突,用户可能希望取消服务 或将其重新安排到另一天。由于规划器无法确保完全掌 握用户的日程信息,因此请求用户输入是避免此类冲突 的一种方式。
通信媒介的复杂性带来了第二层次的问题。在我们 的动机示例中,人们通过家庭中的家用机器人与系统的 规划器进行交互。除了应提供哪些信息之外,还需谨慎 确定何时以及以多高的频率向用户通知任务进度。需要 判断多长时间的延迟才需发出通知。
这种影响可能取决于多种因素,包括:正在进行的服务、 用户的当前活动以及对用户未来计划的潜在影响。
由于本实验是在非老年参与者中进行的,因此无法 确定老年用户是否具有相同的信息偏好。关于任务中断 的相关研究表明,老年人和非老年人对打断的反应方式 相似。然而,由于这些相关研究并未涉及机器人,因此 本实验中发现的偏好应通过与预期最终用户群体的验证 来确认。我们将本研究视为一种工具,用以识别有前景 的交互设计方向,并通过老年用户与ROBOT‐ERA机器 人服务之间的交互对其进行评估。
6 结论
这是一项关于如何在分布式辅助机器人服务中提供任务 进度反馈的探索性研究。目的是了解人们认为哪些类型 的任务进度信息有用且具有信息性,并测试机器人提供 的基于语音的通知是否被视为合适,并能形成对服务完 成所需时间的满意预期。研究发现,参与者更倾向于基 于时间的任务进度陈述,尽管结果表明他们也认为基于 事件的反馈在一定程度上是有用的。他们还认为,在所 测试的示例场景中,语音通知的数量是适当的。本研究 仅调查了服务执行过程中未出现延迟或故障的情况。当 任务执行失败或服务严重延迟时,人们可能需要更多或 不同类型的信息。当出现问题时如何让用户参与重新规 划决策,以及在何种情况下应向用户通知对计划服务的 变更,也是有待进一步研究的问题。这些问题将通过老 年用户与ROBOT‐ERA机器人之间的互动进行探讨,其 中系统在真实环境中执行辅助服务。

















 1436
1436

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









