



 文章对比了YOLOv8中的C2f模块和YOLOv5中的C3模块,两者在初始化参数、源码实现及结构上的差异。C2f模块默认不使用shortcut,而C3模块则默认使用,但两者的shortcut位置在网络结构中相同。C2f设计灵感来源于C3和ELAN,旨在轻量级网络中增强梯度流信息。
文章对比了YOLOv8中的C2f模块和YOLOv5中的C3模块,两者在初始化参数、源码实现及结构上的差异。C2f模块默认不使用shortcut,而C3模块则默认使用,但两者的shortcut位置在网络结构中相同。C2f设计灵感来源于C3和ELAN,旨在轻量级网络中增强梯度流信息。

一、源码对比
YOLOv8完整工程代码下载:ultralytics/ultralytic
C2f模块源码在ultralytics/nn/modules.py下,源码如下:
class C2f(nn.Module):
# CSP Bottleneck with 2 convolutions
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, e=1.0) for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
YOLOv5的完整工程代码下载:ultralytic/yolov5
C3模块源码在models/common.py下,源码如下:
class C3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
- C2f模块和C3模块的对外接口保持一致,都是(ch_in, ch_out, number, shortcut, groups, expansion),方便在yolov5中直接调用C2f模块。
- C2f模块默认不使用shortcut连接,C3模块默认使用shortcut连接,但二者在网络结构中shortcut的位置无差别,即都是在Backbone中使用shortcut连接,在Head中不使用shortcut连接,代码的调用格式有差别。
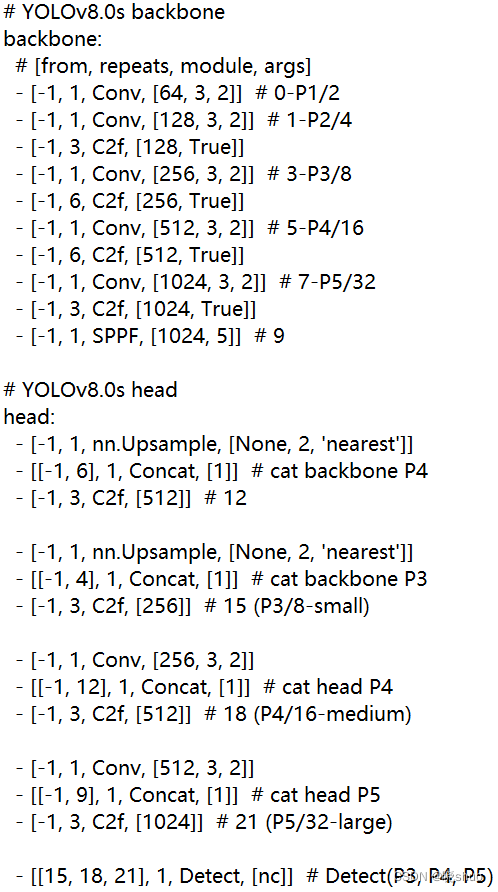
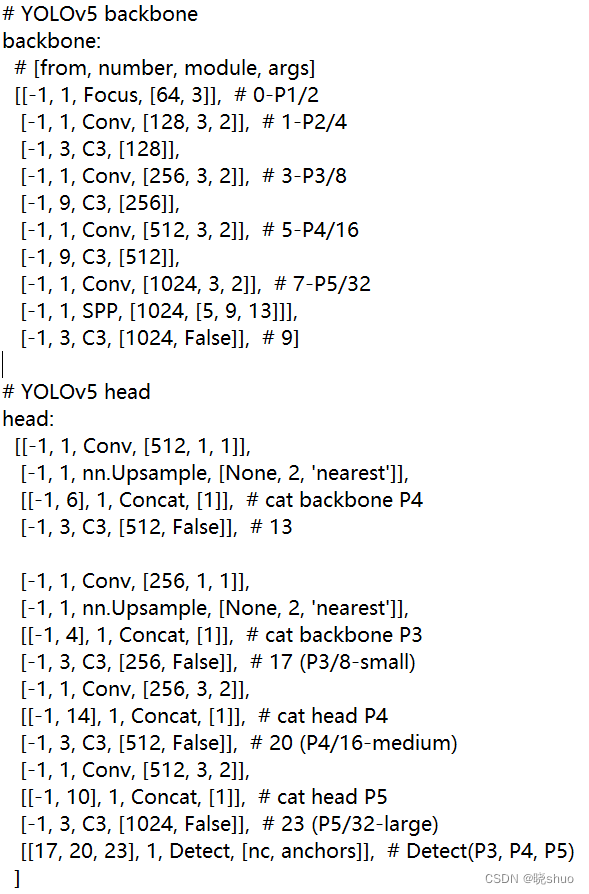
二、结构图对比


- C2f模块参考了C3模块以及ELAN的思想进行的设计,让YOLOv8可以在保证轻量化的同时获得更加丰富的梯度流信息。



















 2599
2599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











