



基于车对车通信的安全导向动态移动闭塞列车控制系统
With 近年来,随着铁路运输的快速发展,迫切需要在保证安全的前提下提高运力[1]。目前,中国列车控制系统(CTCS)在中国广泛应用,可分为五个等级。其中,CTCS‐2和CTCS‐3应用于大多数线路,均采用准移动闭塞模式,该模式将前车占用的前方固定闭塞区段的起点设为移动授权终点(EOA),限制了线路运力。移动闭塞模式通过先进技术实现列车与地面设备之间的双向高速通信,能够实时监控前车运行状态,并向后车发送移动授权(MA)。该移动授权(MA)延伸至前车尾部减去一个安全距离的位置,从而提高了运营效率。
在移动闭塞系统(MBS)中,存在两种列车运行控制模式:绝对距离制动模式(ADBM)和相对距离制动模式(RDBM)。在ADBM中,前车被视为速度为零的静态障碍物,因此列车间隔基于前车与后续列车之间的绝对制动距离。在RDBM中,前车被视为处于运动状态,因此需要考虑前车的速度、位置和制动能力,且由于追踪间隔基于前车与后续列车之间的相对制动距离,因而可以缩短追踪间隔。综上所述,在MBS中采用RDBM有助于提高运力。
然而,关于超速防护方法的研究主要集中在配备准移动闭塞模式的传统列车控制系统上[2]–[5],针对RDBM配置中的防护方法研究较少。近年来,大多数RDBM研究都关注该方法的理论证明效率。例如,宁在RDBM中建立了列车追踪模型,并在1998[6]中证明了其在实际应用中的有效性。2012年,高木提出了砖墙假设,并分析了在纯移动闭塞和相对移动闭塞(RMBs)下两列追踪列车之间的最小距离[7]。2015年,黄等人比较了两种安全制动模式,得出结论认为RDBM更有利于提高运力[8]。2018年,潘等人研究了车辆跟随系统控制问题,证明了速度差法的有效性[9]。这些研究分析并证明了RDBM的效率,其所需的追踪间隔比ADBM更短,但并未考虑其应用的可行性。
关于可行性,竹内等人在2003年比较了四种移动闭塞系统(MBS),即移动空间闭塞、移动时间闭塞、纯移动闭塞和相对移动闭塞,并认为相对移动闭塞(RMB)概念难以应用于常规铁路交通[10]。2009年,埃默里提出了按紧急制动绝对距离模式运行,结合了相对制动与绝对制动,并解释了连续碰撞的危险性[11],[12]。2015年,赵等人提出了一种基于主动通信的动态追踪间隔系统;相比基于砖墙场景和固定闭塞策略的现有方法,该系统可实现更短的追踪间隔[13]。2016年,威廉姆斯认为相对闭塞将是欧洲列车控制系统的下一步发展方向,可以在不显著增加风险的情况下使列车以更小的间隔运行,但前提是基于基础设施的系统的检测能力得到增强[14]。尽管这些研究考虑到了连环碰撞的可能性,但并未给出相应的防护措施。此外,这些研究中描述的RDBM安全制动模型位于二维平面上,难以直观反映对应关系。
摘要—对于现代铁路运输,动态移动闭塞列车控制系统已被广泛研究,以缩短列车追踪间隔并提高运力。本文针对动态移动闭塞列车控制系统,提出了一种基于车对车通信的新型列车追踪方法,用于在前导列车发生突然减速时防止连环碰撞。首先,建立了三维动态安全制动模型以展示列车控制模式;其次,提出了一种多列车信息同步方法,以确保接收消息的有效性;最后,提出了一种协同防撞机制。通过使用实际线路数据进行仿真实验,并与另外两个基准案例研究进行对比模拟,验证了该方法的有效性。结果表明,所提出的方法能够在三列车场景中成功防止连环碰撞。通过高频信息交换保障车对车通信的正常运行,该方法能够在高密度网络中有效避免因突发减速引起的连环碰撞。
基于车对车通信的控制系统
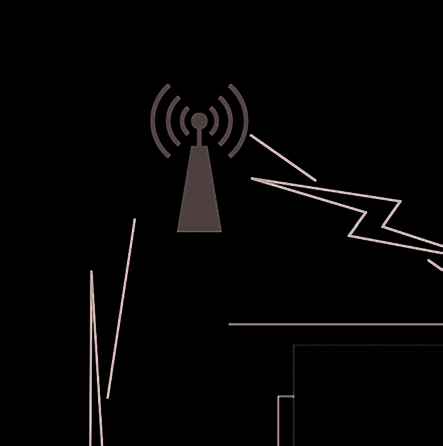
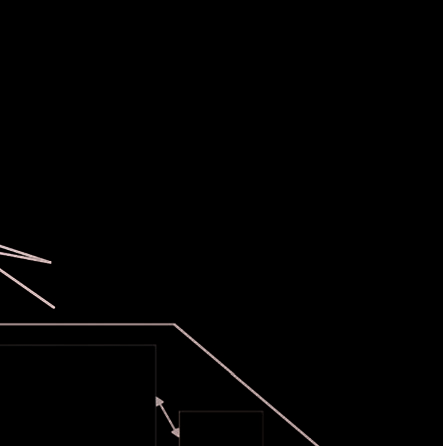
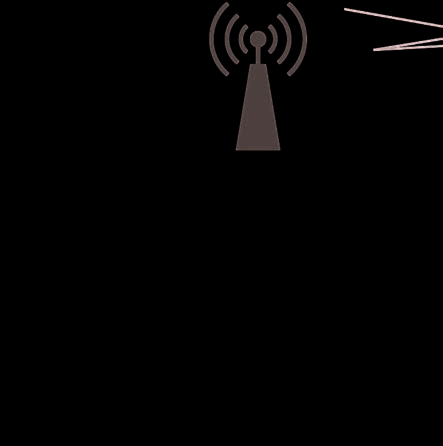
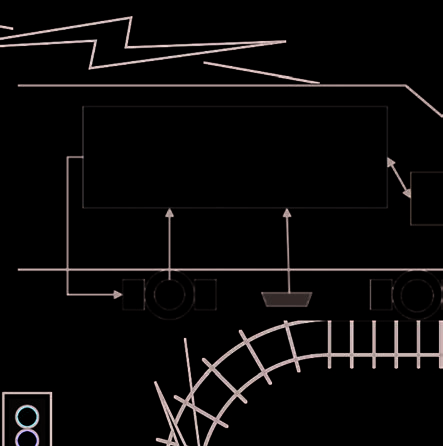
关于车对车通信的研究已有若干成果。例如,使用LTE技术的数据通信系统的可靠性已在[18]中得到验证,并且在[19]中提出了一种基于LTE的新型认知控制方案,用于地铁和车对车通信连接,以提升基于多列车通信的控制系统的质量和韧性。因此,引入基于车对车通信的列车控制系统是可行的。该基于车对车通信的系统在传统方法的基础上得以简化,地面设备的数量被减少,将某些功能(如分配移动授权和操作轨旁联锁设备)转移到车载设备上,从而优化系统结构。通过列车对列车通信,列车可自主识别前方和后方的其他列车[20]。基于列车对列车通信的典型列车控制系统如图1[21]所示。
这种列车控制系统由车载设备和地面设备组成。地面设备包括集中调度控制(CTC)、维护管理单元(MMU)、轨旁对象控制单元(OCU)以及基础轨旁信号设备(道岔、信号机、应答器等)。OCU安装在道岔附近,能够监控信号设备状态并实现无线通信。CTC控制中心负责监督行车、调整和下达运行计划、提供线路信息、接收列车运行信息等。MMU用于基础信号设备的维护和管理。车载设备包括车辆车载控制器(VOBC)、人机界面、无线通信单元、列车接口单元(TIU)等。其中,VOBC为核心设备,完成移动授权计算、超速防护和自动驾驶等功能,以确保安全。
在该系统中,列车的安全定位功能由多种车载传感器实现,而非轨道电路和计轴设备。这些传感器实时测定列车的运行方向、速度和位置,并根据实际情况在测量数据基础上增加安全裕度。
该系统的通信分为两部分:车对车直接通信以及车载控制器与轨旁控制子系统(CTC和OCU)之间的连续双向通信。通过车对车通信,后续列车能够直接获取前车的速度和位置信息,从而大大减少通信延迟,并便于实现便捷的交互。通过VOBC与OCU通信,列车可以获取基础信号设备的状态,并请求OCU对轨道设备进行控制,例如道岔及通向危险区域的防护区段。通过VOBC与CTC通信,时刻表信息被发送至车载控制器。根据CTC命令,车载控制器请求轨旁资源以设置进路。该系统能够实时传输大量信息,因此适用于采用动态移动闭塞。
三维动态安全制动模型
动态安全制动模型
在移动闭塞系统中,有两种列车运行控制模式:ADBM和RDBM。在ADBM中,安全制动模式由IEEE 1474.1定义,如图2[22]所示。该模型考虑了前车的位置不确定性、后车的位置不确定性、列车长度、系统允许的超速、系统反应时间与延迟、保证的紧急制动率、最大速度测量误差等因素,以确保后车能够在不越过防护点的情况下停车。在ADBM中,移动授权应给予前车末端,并附加安全裕度,最小安全防护距离DAD由以下因素确定:
$$
D_{AD} = D_{eF} + L
\tag{1}
$$
其中,$D_{eF}$表示后车在最不利条件下实施紧急制动至完全停车所需的制动距离,L表示安全裕度。在RDBM中,移动授权(MA)应给出前车在实施紧急制动后停车的位置,并增加安全裕度,最小安全防护距离$D_{RD}$由前车的速度、位置和制动能力决定,具体如下:
$$
D_{RD} = D_{eF} + L - D_{eL}
\tag{2}
$$
其中$D_{eL}$表示前车在最有利条件下实施紧急制动至完全停止所需的制动距离。当前车速度等于零时,这两种模式是等效的。
图2所示的安全制动模型未考虑前车的速度和紧急制动时间。因此,即使前车遇到导致其速度急剧下降的严重事故,所计算出的最小安全距离仍可确保后车在防护点前停车。然而,该模型存在以下缺点:
1) 在列车追踪问题中,将前车视为静止障碍物而非移动障碍物是不现实且低效的。
2) 用于描述列车制动状态的二维平面上的速度防护曲线难以表达动态追踪过程。
因此,本文提出了一种基于追踪距离并考虑前车运动特性的三维动态安全制动模型。如果两列列车之间的距离作为制动的依据,当追踪距离小于$D_{RD}$(由公式(2)确定)时,后车应立即实施紧急制动。
$D_{eF}$的计算应基于IEEE 1474.1标准中对最不利条件下制动行为的描述,并考虑各种延迟,如下所示:
$$
\begin{aligned}
D_{eF} &= D_{etF} + D_{ecF} + D_{ebF} \
&= v_F t_{ATP}^F + \frac{1}{2} a_{tF} (t_{ATP}^F)^2 + v_F t_{tF} + \frac{1}{2} a_{cF} (t_{tF})^2 + \frac{v_F^2}{2 a_{geF}} \
&= v_F (t_{ATP}^F + t_{tF}) + \frac{1}{2} a_{tF} (t_{ATP}^F)^2 + \frac{1}{2} a_{cF} (t_{tF})^2 + \frac{v_F^2}{2 a_{geF}}
\end{aligned}
\tag{3}
$$
其中$D_{etF}$表示图2中A和B阶段所需的加速距离。本文对列车运行行为进行了简化,将D阶段紧急制动建立时间内的列车运行状态视为惰行,因此$D_{ecF}$表示C和D阶段所需的惰行距离;$D_{ebF}$表示E阶段所需的制动距离;$t_{ATP}^F$表示后车自动列车保护(ATP)设备的反应时间;$t_{tF}$是后车在启动紧急制动后断开牵引所需的时间;$t_{eF}$表示后车实施紧急制动所需的附加时间;$t_{bF}$ 描述了后车所需的紧急制动建立时间; $v_F$表示后车开始实施紧急制动时的速度;$a_{tF}$表示后车的最大牵引加速度;$a_{cF}$表示后车的最大惰行加速度;且$a_{geF}$表示后车的保证紧急制动率。
然而,当计算$D_{eL}$时,应认为列车处于理想状态,完全没有延迟;换句话说,制动在启动后立即完成,如下所示:
$$
D_{eL} = \frac{v_L^2}{2 a_{eL}}
\tag{4}
$$
其中$v_L$表示后车实施紧急制动时前车的速度,$a_{eL}$表示前车的最大紧急制动减速度。
综上所述,可根据上述公式建立用于描述动态移动闭塞中列车行为的安全制动模型,如图3所示,其中
$$
c = \frac{v_F^2}{2 a_{geF}} + v_F (t_{ATP}^F + t_{tF}) + \frac{1}{2} a_{tF} (t_{ATP}^F)^2 + \frac{1}{2} a_{cF} (t_{tF})^2
\tag{5}
$$
该模型主要由两个有限曲面组成:常用制动触发面和紧急制动触发面。当列车之间的间距低于该曲面时,将施加相应的制动。如果触发了紧急制动,则必须等到列车速度降为零后才能缓解。在此模型中,x轴表示前车的速度$(v_L, \text{m/s})$,y轴表示后车的速度$(v_F, \text{m/s})$,z轴表示前车与后车之间的安全防护距离$(D_{RD}, \text{m})$以及后续列车。当$v_L = 0, v_F = 0$时,$D_{RD}$的值为零。随着z轴截距随$v_L$值的增加而减小。该模型能够清晰地展示动态移动闭塞列车控制系统中施加制动的距离与两列列车的速度之间的关系。当前车以固定速度运行且后车加速时,后车应保持更短的安全距离。当前车速度固定而后车加速时,后车应保持更长的安全距离。当前车处于静止状态时,其与后车之间的跟踪关系等同于ADBM。
模型的安全分析
动态制动模型充分考虑了最不利条件下制动行为的描述,从而保证安全。后车不可能与前车发生碰撞,除非存在导致前车急剧减速的碰撞事件。为了证明该模型满足安全要求,采用反证法进行论证。假设后车在$T_0$时刻实施紧急制动,并在$T_c$时刻与前车发生碰撞。当后车实施紧急制动时,后车的速度为$v_F$,前车的速度为$v_L$。根据碰撞发生的时间,可将事件分为以下两种情况:
1) 当前车静止时发生碰撞。
2) 当前车在运动时发生碰撞。
对于情况1,由于前车处于静止状态,其最小制动距离为$D_{eL}$,后车与前车发生碰撞意味着从牵引力被切断到列车完全静止的最大距离超过了最小制动距离与两列车之间距离之和;即$D_{eF} > D_{eL} + D_{RD}$。根据式(2)中对$D_{RD}$的定义,可推导出若发生碰撞,则应满足$D_{eF} > D_{eL} + D_{eF} + L - D_{eL}$,即$L < 0$。然而,显然安全裕度$L$是一个正数,无法满足该不等式,因此第一种情况的假设不成立。因此,在图3所示的动态安全制动模型中,当前车静止时不会发生碰撞。
对于情况二,由于前车处于运动状态,根据碰撞发生的时间$T_c$,存在以下三种情形:
1) 后车实施紧急制动后的加速过程中发生追尾碰撞的时刻$T_c$,即图2中的A期或B期内;换句话说,$T_0 < T_c \leq T_0 + t_{ATP}^F + t_{tF}$。
2) 后车实施紧急制动后的惰行过程中发生追尾碰撞的时刻$T_c$,即图2中的C期或D期内;换句话说,$T_0 + t_{ATP}^F + t_{tF} < T_c \leq T_0 + t_{ATP}^F + t_{tF} + t_{eF} + t_{bF}$。
3) 后车实施紧急制动后的减速过程中发生追尾碰撞的时刻$T_c$,即图2中的E期内;换句话说,$T_0 + t_{ATP}^F + t_{tF} + t_{eF} + t_{bF} < T_c \leq T_0 + t_{ATP}^F + t_{tF} + t_{eF} + t_{bF} + \frac{v_F}{a_{geF}}$。
对于第一种情况,后车以加速度$a_{tF}$从时刻$T_0$到时刻$T_c$行驶的距离,应大于前车在相同时间段内以减速度$a_{eL}$行驶的距离与两列车之间距离的总和;即存在一个$T_c$使得(6)成立:
$$
v_F (T_c - T_0) + \frac{1}{2} a_{tF} (T_c - T_0)^2 > v_L (T_c - T_0) - \frac{1}{2} a_{eL} (T_c - T_0)^2 + D_{RD}
\tag{6}
$$
证明
这里,$x$定义为$x = T_c - T_0$,所以$0 < x \leq t_{ATP}^F + t_{tF}$,且(6)等价于(7),如下所示:
$$
v_F x + \frac{1}{2} a_{tF} x^2 > v_L x - \frac{1}{2} a_{eL} x^2 + D_{RD}
\tag{7}
$$
根据$D_{RD}$在(2)中的定义,可以推导出如果发生碰撞,则$L < 0$应满足该条件。由于安全裕度为正值,即$L > 0$,该不等式不成立,因此(7)不成立。因此,该假设不成立;换句话说,在后车实施紧急制动后的加速过程中不可能发生追尾碰撞。因此,在图3的动态安全制动模型中,不存在某个特定的$T_c$会导致前车在运行时发生碰撞。综上所述,当前车未因无碰撞事件而出现速度骤降时,后车与前车发生碰撞的可能性极低。
动态移动闭塞中的列车系统控制
多列车信息同步
在基于车对车通信的控制系统中,需要列车之间进行高频交互以获取实时信息,例如位置和速度,从而判断运行状态并计算最小安全防护距离。如果从前车接收到过时的信息,运行条件的判断将受到影响,从而导致最小安全距离计算错误。为了识别过时信息,各列车应同时发送信息,以便根据信息到达时间过滤过期数据。显然,该方法要求所有列车的时钟保持一致。然而,列车时钟与标准时钟之间不可避免地存在最大漂移率$\rho$,这导致列车记录的时间与标准时钟记录的时间之间存在如下关系:
$$
(1 - \rho)(t_2 - t_1) \leq C(t_2) - C(t_1) \leq (1 + \rho)(t_2 - t_1)
\tag{8}
$$
其中$C$表示一列列车的时钟,$C(t_1)$表示当标准时间为$t_1$时的物理时钟。
由于时钟漂移,列车的时钟必然会偏离标准时间。因此,有必要对列车时钟进行校正,以使每列列车保持一致的时间。本文中称之为列车间信息同步。为了解决列车间信息同步问题,引入了一种时钟校正方案[23],[24]。该方案不需要统一的时钟源;它根据来自其他列车的同步信息到达时间来校正列车时钟,从而使误差保持在有限范围内。
列车在一段时间$R$内与其他列车交互,并在每个周期的开始和结束留出一个窗口,如图4所示。在图4中,$\rho$表示最大漂移率;$\delta$表示当时钟校正算法完成时,任意两个正常列车时钟之间的最大偏移;$d$表示列车之间信息传输延迟的中位数;$\epsilon$表示列车之间信息传输延迟的不确定值;$T_{k1}$表征列车广播同步信息的物理时间;而$T_{k2}$, $T_{k3}$和$T_{k4}$描述了同步信息到达列车的时间。因此,正常列车的信息传输延迟在$[d - \epsilon, d + \epsilon]$范围内。
等待窗口结束后,车载控制器检查接收到的信息。如果信息未落入该窗口内,车载设备将其标记为无效。根据接收到的有效同步信息,计算AV的值,即相应的时钟校正变量。如果有效信息的数量少于两个,则将有效信息到达列车的时间与列车广播同步信息的时间取平均值,并赋给AV,如下所示:
$$
AV = \frac{T_{e1} + T_1}{2}
\tag{9}
$$
其中$T_{e1}$表示同步信息到达列车的时间,$T_1$表示列车广播同步信息的时间。
碰撞预警机制(CCA)
在动态移动闭塞控制系统中,如果前车发生严重碰撞导致速度迅速下降,则列车的制动距离将远小于其紧急制动距离,这与前述设计模型中的运行行为不一致。因此,当两列车间的空间为最小安全距离时$D_{RD}$,后车必然与前车发生碰撞。更严重的是,如果列车防护仅依赖于动态安全制动模型,在高密度行车情况下,后续列车可能发生连环碰撞。例如,列车A因碰撞而迅速停车,列车B追尾列车A。若列车C根据动态安全制动模型进行防护,仅依据列车B发送的速度和位置信息无法识别事故状态,列车B与列车C之间仍将保持最小安全防护距离$D_{RD}$。由于列车B碰撞后的运行距离未达到动态安全制动模型所要求的长度,因此列车C将继续运行并撞上列车B。
为避免连环碰撞事故,在动态MBS中需提出适用于铁路应用的CCA[25]。本文中的CCA是一种在动态移动闭塞中将两列前车标记为威胁并与其进行高频信息交换的机制,以确保及时发现通信故障。当列车检测到碰撞或司机看到危险,将立即向后续列车发送警报,指示其制动。基于多列车信息同步,CCA的作用如下:
1) 识别威胁性前导列车 :根据列车接收到的外部运行信息,可将最近的两列前车识别为威胁。此外,在跟踪结束之前不应更换已识别的威胁性列车。因此,为了避免错误,在应用动态移动闭塞之前应多次进行识别。
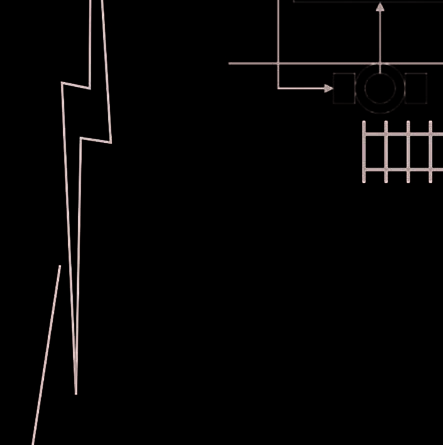
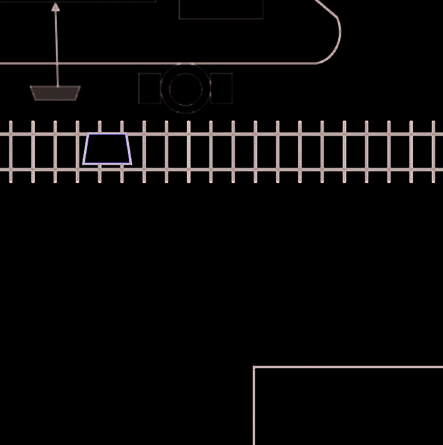
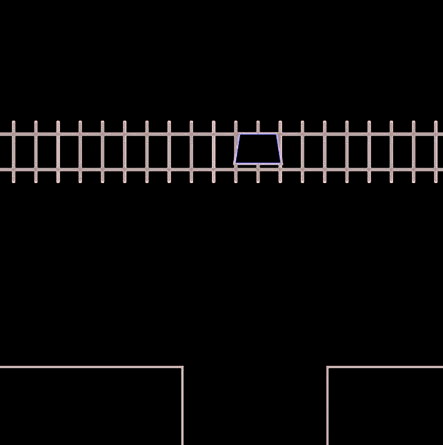
2) 确定与威胁列车交换信息的适当频率 :如果信息交互频率过高,系统可能会过载;如果交互频率过低,则难以及时发现问题。因此,应根据列车与最远威胁列车之间的距离$S$来确定交互频率,如图5所示。列车C与列车A之间的交互频率$H$确定如下:
$$
H = \frac{V(t)}{S - L_{TL} - D_{eF}}
\tag{11}
$$
其中$L_{TL}$表示前车(即列车B)的长度;$D_{eF}$表示列车C在最不利条件下从实施紧急制动到完全停止所需的制动距离;$V(t)$表示列车C的当前速度。因此,多列车信息同步的周期长度$R$确定如下:
$$
R = \frac{1}{H}
\tag{12}
$$
3) 检测危险、输出制动命令并向后续列车发送警告信息 :一旦列车A检测到碰撞或其司机遇到危险,该列车将向其后方的列车广播警告信息,以便列车C能够实施制动并避免碰撞。在CCA中,列车需要以频率$H$与其两列前导列车进行实时数据交互。因此,列车需要同步其信息。在(10)中,$n = 3$,且平均值(AV)的计算公式为:
$$
AV = \frac{T_{\text{max}} + T_{\text{min}}}{2}, \quad f + 1 = 1
\tag{13}
$$
面向安全的列车追踪方法
列车追踪方法结合了动态安全制动模型和CCA机制,如图6所示。该方法由车载系统中的安全计算机实现,包括动态安全制动模块和CCA模块。动态安全制动模块的输入包括前车和后车的速度和位置信息;输出为控制命令。在CCA模块中,输入包括列车运行数据、警告信息、后续列车的通信请求、前车的通信回复以及碰撞检测信息;输出包括制动指令、警告信息、通信请求、通信回复等。

仿真与分析
本文使用Simulink对面向安全的列车追踪方法进行建模。通过集成列车运动模型,构建了完整的表示,并将其应用于动态移动闭塞下三列列车的基本场景。
仿真参数
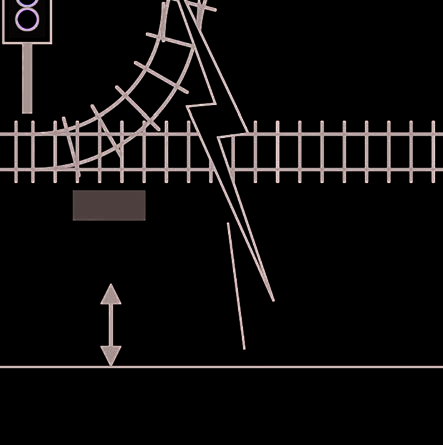
为了验证动态移动闭塞列车控制系统的有效性,针对包含三列列车的基本场景,在图7所示线路上进行了仿真测试。列车A、B和C的初始速度设置为80 km/h,初始车头位置分别为K955+800 m、K955+500 m和K955+200 m。EOA(行车许可终点)的位置为K956+200 m,列车长度为120 m。(1)–(4)中的相关参数设置如下:
$$
L = 5,\ t_1 = 0.5,\ a_{tF} = 1,\ t_2 = 1,\ a_{cF} = 0.5,\ a_{geF} = 1.1,\ a_{eL} = 1.2
$$
单位分别为:m, s, m/s², s, m/s², m/s², m/s²。
因此,式(2)中的最小安全防护距离可以确定为:$D_{RD} = 92.02\ \text{m}$。同样可求得式(1)中的最小安全防护距离:$D_{AD} = 297.74\ \text{m}$。显然,采用动态移动闭塞后,追踪间隔缩短了。
模拟实验
为了进行仿真实验,首先应建立列车模型。它包括列车运动模型和列车追踪方法模型。列车运动模型用于根据外部传入的控制命令输出相应的牵引或制动力,并实时计算列车的当前速度和位置。本文中对列车的制动状态进行了简化,仅保留紧急制动。此外,该模型将最小速度设置为零。通常情况下,列车发生碰撞后速度会迅速降低;因此,当列车发生事故时,其速度将被设为零。安全控制模型主要用于通过发出制动指令和警告信息来防止列车事故发生。
当两列车间的距离不满足由公式(2)描述的动态安全制动模型的要求时,将发出制动命令;当接收到外部警报信息时,也会发出制动命令。当列车发生碰撞时,将发出警报。
列车模型通过将列车运动模型与列车追踪模型相结合而获得,从而使列车运动模型能够在列车追踪模型的保护下运行。需要在列车追踪模型输出的控制命令中添加一个延迟单元,然后连接到列车运动模型,以模拟自动列车保护(ATP)设备所要求的反应时间并按需切断牵引力;该延迟设置为1.5秒。列车模型如图8所示。本文利用实际线路数据进行了以下三组实验:
1) 列车A的碰撞点为K956+400 m,该位置比EOA(行车许可终点)更远。
2) 切断外部预警信号后,列车A的碰撞点为K956+400 m。
3) 启用CCA后,列车A的碰撞点为K956+400 m。
(12)中的循环$R$设置为3秒。
结果分析
在实验1中,由于没有外部因素导致的速度突然损失,最小安全防护距离$D_{RD}$根据(2)–(4)实时计算。如图9(a)所示,实验1的结果显示列车A、B和C保持彼此之间180 m的初始距离。由于最小安全防护制动距离$D_{RD} = 180\ \text{m}$时,不会触发紧急制动。由于列车A正在接近EOA(行车许可终点),需要减速。当其速度降至15.4 m/s时,对应的最小安全防护距离$D_{RD}$为180 m,导致列车B实施紧急制动。同样,当列车B的速度降至15.4 m/s时,列车C启动紧急制动。如图9(a)所示,三列列车依次减速至零,且无碰撞发生,表明在无干扰情况下,采用动态移动闭塞的列车能够高效追踪运行并确保安全。
如图9(b)所示,实验2的结果表明,在列车A发生事故后,如果切断预警信号,仅依靠动态安全制动模型进行防护,则三列列车将发生连锁碰撞。在此实验中,列车B一旦接收到列车A的速度信息,立即实施紧急制动,即$v_A = 0\ \text{m/s}$,所需制动距离为$D_{Be} = 292.74\ \text{m}$,而实际距离仅为180 m,导致列车B与列车A发生碰撞。只有当列车B的速度不满足动态安全制动模型时,即$v_B = 15.4\ \text{m/s}$,列车C才会实施紧急制动。然而,在本实验中,列车B在速度减速至15.4 m/s之前已与列车A发生碰撞,使其速度立即降至零。一旦列车C接收到速度信息$v_B = 0\ \text{m/s}$,便立即实施紧急制动,但其制动距离为$D_{eC} = 292.74\ \text{m}$,而实际距离仅为180 m,最终导致列车C与列车B发生碰撞。
如图9(c)所示,实验3的结果表明,在启用CCA机制的情况下,尽管列车A和列车B仍然发生碰撞,但列车C在接收到列车A的警告信息后立即实施紧急制动,从而成功避免了事故。实验2和实验3表明,CCA机制能够有效防止连环列车碰撞。本文主要关注结合CCA的列车控制模型。由于已考虑到前车因事故而快速停车的情况,因此避免了连环碰撞的发生。
结论
本文提出了一种基于车对车通信的动态移动闭塞列车控制系统。该列车追踪方法基于多列车信息同步,计算并分析列车之间的最小安全距离。提出了一种三维动态安全制动模型,能够直接反映列车速度与安全距离之间的关系。根据动态MBS中高密度追踪的特点,提出了碰撞预警机制(CCA)以避免连环碰撞。CCA通过高频信息交换确保正常通信,避免警告信息丢失。同时,一旦检测到异常情况,将立即输出紧急制动指令和警告信息。采用Simulink模型应用了面向安全的列车追踪方法,并结合列车运动模型构建了完整的列车模型,用于模拟动态移动闭塞下三列车的运行场景。通过三组对比实验验证了该方法的有效性,结果表明该方法能够缩短追踪间隔并避免连环碰撞。

















 1850
1850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









