




车辆横摆角速度(YawRate)的计算方法
1. 轮速差估算
y a w _ r a t e = ( w 1 − w 2 ) R r A c o s θ = v 1 − v 2 A c o s θ (1) yaw\_rate = \frac{(w_1-w_2)R_r}{Acos\theta} = \frac{v_1-v_2}{Acos\theta} \tag{1} yaw_rate=Acosθ(w1−w2)Rr=Acosθv1−v2(1)
其中: w 1 w_1 w1 , w 2 w_2 w2是车辆内外侧车轮角速度, R r R_r Rr 车轮半径,A 代表车辆内外侧车轮间宽度,θ车轮偏角,基本原理如下图所示。
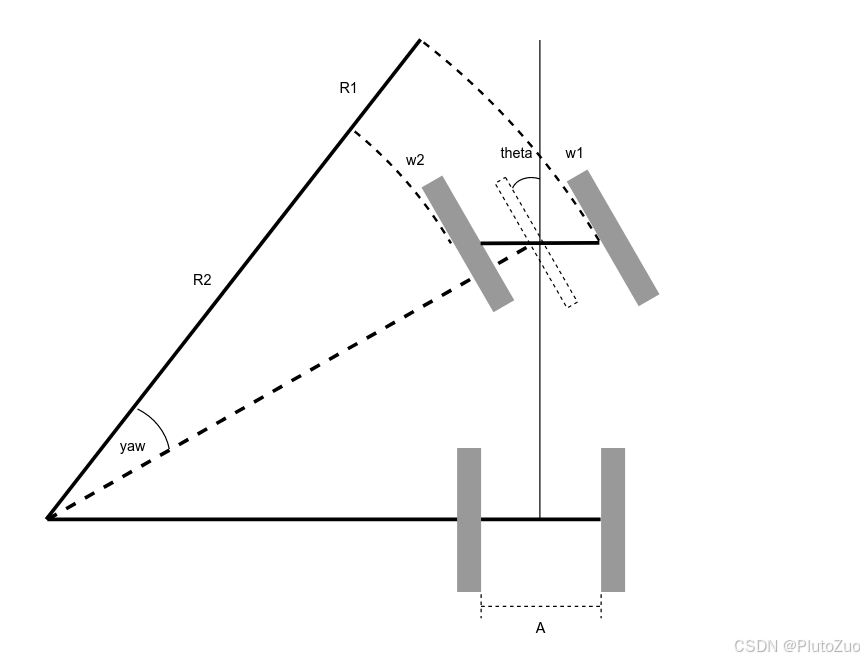
上式推导过程如下:
y a w ( R 1 − R 2 ) c o s θ = w 1 t R r − w 2 t R r y a w = ( w 1 − w 2 ) t R r ( R 1 − R 2 ) c o s θ y a w ˙ = ( w 1 − w 2 ) t R r ( R 1 − R 2 ) t c o s θ y a w ˙ = ( w 1 − w 2 ) R r A c o s θ y a w ˙ = v 1 − v 2 A c o s θ (2) y a w ( R_1 − R_2 ) c o s θ = w_1 t R_r − w_2 t R_r \\\\ y a w = \frac{( w_1 − w_2 ) t R_r} {( R_1 − R_2 ) c o s θ} \\\\ y a w ˙ = \frac{( w_1 − w_2 ) t R_r} {( R_1 − R_2 ) t c o s θ} \\\\ y a w ˙ = \frac{( w_1 − w_2 ) R_r} {A c o s θ} \\\\ y a w ˙ = \frac{v_1 − v_2} {A c o s θ} \tag{2} yaw(R
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









