




 本文详细探讨了手势挥动算法的实现原理,包括挥动方向和力度的量化,利用欧拉角和角速度进行运动模型建立,以及如何通过角速度峰值检测实现精准的手势识别。
本文详细探讨了手势挥动算法的实现原理,包括挥动方向和力度的量化,利用欧拉角和角速度进行运动模型建立,以及如何通过角速度峰值检测实现精准的手势识别。
1.目标
- 手势挥动的方向α,-180°~ 180°
- 挥动力度大小intensity,0~10
2.已知量
- 欧拉角pitch,roll,yaw
- 地理坐标系的角速度 pitch_rate, roll_rate,yaw_rate
3.运动模型
目标体在空中挥动模型可以这样定义,把三维空间模型简化为二维空间模型,我们可以把目标体当做一个点,运动的空间当做一个XY二维坐标系,接下来我们只要分析这个点在XY坐标系下是怎么运动就可以了,空间中运动模型如下图:
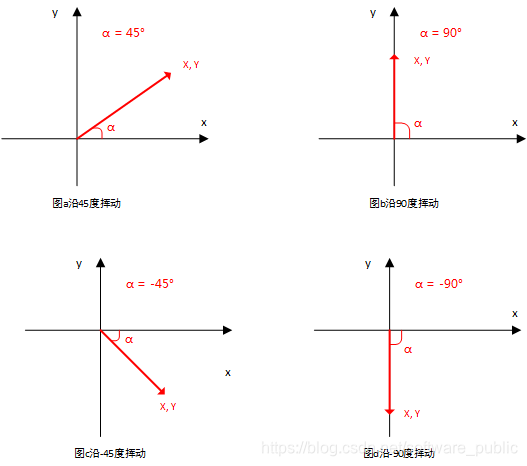
从上图中可以看出,挥动角度为α ,挥动力度大小可以用向量 的模表示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4898
4898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









