



 本文介绍了C++与Python在ROS中通过发布/订阅机制实现消息通信的过程,包括发布方的C++代码示例,如何设置定时计数,以及Python发布和订阅方的实现。同时涉及CMakeLists.txt配置和解决订阅初期数据丢失问题的方法。
本文介绍了C++与Python在ROS中通过发布/订阅机制实现消息通信的过程,包括发布方的C++代码示例,如何设置定时计数,以及Python发布和订阅方的实现。同时涉及CMakeLists.txt配置和解决订阅初期数据丢失问题的方法。
1.话题通信理论模型
 来源:https://www.bilibili.com/video/BV1Ci4y1L7ZZ?p=40
来源:https://www.bilibili.com/video/BV1Ci4y1L7ZZ?p=40
2.1 C++发布方框架

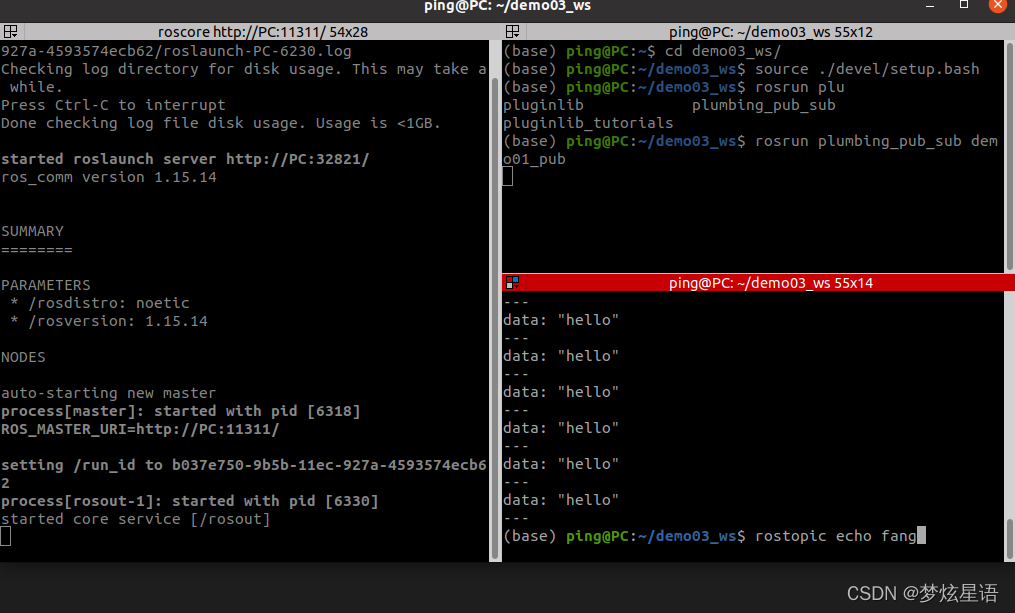
注:运行rosrun xxx 不输出时:
如“rosrun plumbing_pub_sub demo01_pub”
输入:
rostopic echo 话题名称
如:
“rostopic echo fang”
(fang为文件中定义的)
例:
2.2 发布与订阅
2.2.1 发布方:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
/*
发布方实现:
1.包含头文件
ROS中文本类型 -->std_msgs/String.h
2.初始化ROS节点
3.创建节点句柄
4.创建发布者对象
5.编写发布逻辑并发布数据
6.声明spin()函数
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化ROS节点
ros::init(argc,argv,"erGouZi");
//3.创建节点句柄
ros::NodeHandle nh;
//4.创建发布者对象
ros::Publisher pub = nh.advertise<std_msgs::String>("fang",10);
//5.编写发布逻辑并发布数据
//要求以 10HZ 的频率发布数据,并且文本后添加编号
//先创建被发布的消息
std_msgs::String msg;
//发布频率
ros::Rate rate(10);
//设置编号(添加计算器)
int count = 0;
//编写循环,循环中发布数据
while (ros::ok())
{
count++;
//实现字符串拼接数字
std::stringstream ss;
ss <<"hello ---> " << count;
//msg.data = "hello";
msg.data = ss.str();
pub.publish(msg);
//添加日志:
ROS_INFO("发布的数据是:%s", ss.str().c_str());
rate.sleep();
ros::spinOnce(); //官方建议添加,处理回调函数
}
return 0;
}
2.2.2 订阅方
#include "ros/ros.h"
#include "std_msgs/String.h"
/*
订阅方实现:
1.包含头文件
ROS中文本类型 -->std_msgs/String.h
2.初始化ROS节点
3.创建节点句柄
4.创建订阅者对象
5.处理订阅到的数据
6.声明spin()函数
*/
void doMsg(const std_msgs::String::ConstPtr &msg){
//通过msg获取并操作订阅到的数据
ROS_INFO("翠花订阅的数据:%s", msg->data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化ROS节点
ros::init(argc,argv,"cuiHua");
//3.创建节点句柄
ros::NodeHandle nh;
//4.创建订阅者对象
ros::Subscriber sub = nh.subscribe("fang",10,doMsg);
//5.处理订阅到的数据
//处理回调函数
ros::spin();
return 0;
}
2.3 修改CMakeLists.txt文件
add_executable与target_link_libraries:


2.4 终端输出:
注:在工作空间下source一下:
source ./devel/setup.bash

2.5 补充:
2.5.1 订阅时,前几条数据丢失
原因:
发送前几条数据时,publisher还未在roscore注册完毕
解决:
注册后加入休眠 ros::Duration(3).sleep(); 延迟第一条数据的发送(添加了3秒的失眠)
ros::Duration(3).sleep();
如:

3.1 python发布方框架
#! /usr/bin/env python
import rospy
from std_msgs.msg import String #发布的消息类型
"""
使用 python 实现消息发布:
1.导包;
2.初始化ROS节点;
3.创建发布者对象
4.编写发布逻辑并发布数据
"""
if __name__ == "__main__":
#2.初始化ROS节点;
rospy.init_node("sanDai") #传入节点名称
#3.创建发布者对象
pub = rospy.Publisher("che",String,queue_size=10)
#4.编写发布逻辑并发布数据
#创建数据
msg = String()
#使用循环发布数据
while not rospy.is_shutdown():
msg.data = "hello"
#发布数据
pub.publish(msg)
注:
3.1.1 python文件添加可执行权限:
chmod +x *.py
如:

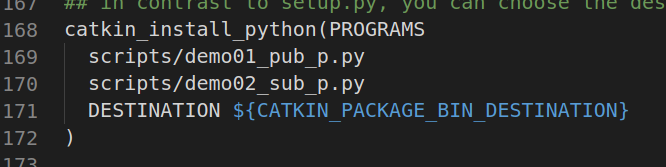
3.1.2 修改CMakeLists.txt

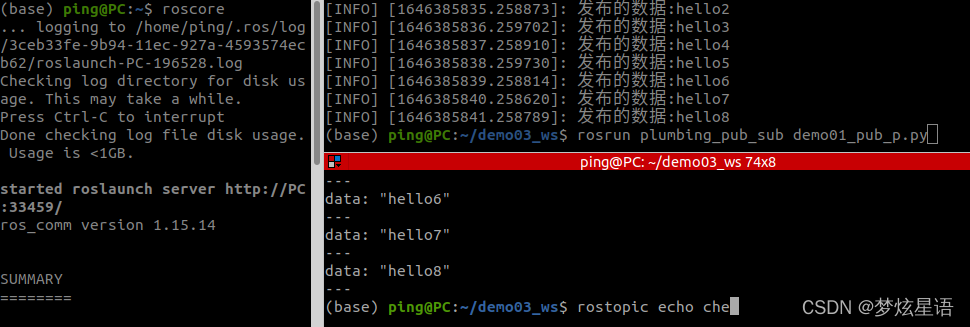
3.1.3 输出:

3.2 设置编号计数(仅修改上述框架#4的地方)
代码:
#4.编写发布逻辑并发布数据
#创建数据
msg = String()
#指定发布频率
rate = rospy.Rate(1)
#设置计算器
count = 0
#使用循环发布数据
while not rospy.is_shutdown():
count += 1
msg.data = "hello" + str(count)
#发布数据
pub.publish(msg)
rospy.loginfo("发布的数据:%s",msg.data)
rate.sleep()
输出:
3.3 发布与订阅
3.3.1发布方:
#! /usr/bin/env python
from itertools import count
import rospy
from std_msgs.msg import String #发布的消息类型
"""
使用 python 实现消息发布:
1.导包;
2.初始化ROS节点;
3.创建发布者对象
4.编写发布逻辑并发布数据
"""
if __name__ == "__main__":
#2.初始化ROS节点;
rospy.init_node("sanDai") #传入节点名称
#3.创建发布者对象
pub = rospy.Publisher("che",String,queue_size=10)
#4.编写发布逻辑并发布数据
#创建数据
msg = String()
#指定发布频率
rate = rospy.Rate(1)
#设置计算器
count = 0
#使用循环发布数据
while not rospy.is_shutdown():
count += 1
msg.data = "hello" + str(count)
#发布数据
pub.publish(msg)
rospy.loginfo("发布的数据:%s",msg.data)
rate.sleep()
3.3.2 订阅方
# !/uer/bin/env python
import rospy
from std_msgs.msg import String
"""
订阅实现流程:
1.导包;
2.初始化ROS节点;
3.创建一个订阅者对象;
4.回调函数处理数据
5.spin()
"""
def doMsg(msg):
rospy.loginfo("我订阅的数据:%s",msg.data)
if __name__ == "__main__":
#2.初始化ROS节点;
rospy.init_node("huaHhua")
#3.创建一个订阅者对象;
sub = rospy.Subscriber("che",String,doMsg,queue_size=10)
#4.回调函数处理数据
#5.spin()
rospy.spin()
pass
3.3.3 修改CMakeLists.txt
3.3.4 输出

3.3.5 补充
订阅时,前几条数据丢失
原因:
发送前几条数据时,publisher还未在roscore注册完毕(同上)
解决:
注册后加入休眠 rospy.sleep(3); 延迟第一条数据的发送(添加了3秒的失眠)
rospy.sleep(3)
如图:

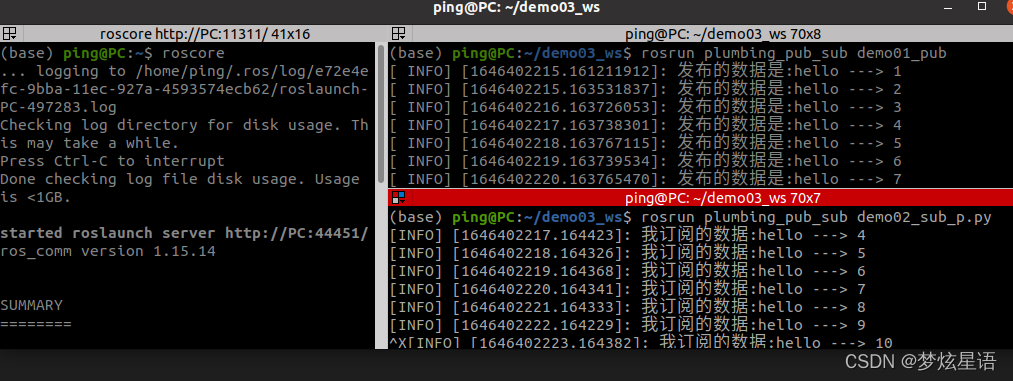
4. C++与python节点通信
文件1:c++的发布方;
文件2:python的订阅方
注:
将话题名称改为一样,c++文件记得source
 输出:
输出:

















 2356
2356

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









