




 本文介绍了RNN的结构和参数共享机制,以及梯度消失和梯度爆炸问题。为了解决这些问题,文章详细阐述了LSTM的长短期记忆机制和三扇门(输入门、遗忘门、输出门)的工作原理,以及GRU如何通过更新门和重置门简化LSTM的复杂性,同时保持良好的性能。LSTM和GRU都是为了解决RNN的长期依赖问题而提出的变体,各有优缺点,适用于不同的应用场景。
本文介绍了RNN的结构和参数共享机制,以及梯度消失和梯度爆炸问题。为了解决这些问题,文章详细阐述了LSTM的长短期记忆机制和三扇门(输入门、遗忘门、输出门)的工作原理,以及GRU如何通过更新门和重置门简化LSTM的复杂性,同时保持良好的性能。LSTM和GRU都是为了解决RNN的长期依赖问题而提出的变体,各有优缺点,适用于不同的应用场景。
RNN(Recurrent Neural Network)循环神经网络
1、介绍
卷积神经网络等的输入和输出都是相互独立的,而RNN拥有记忆能力,其记忆能力依赖于输入和输出
网络结构如下图所示:
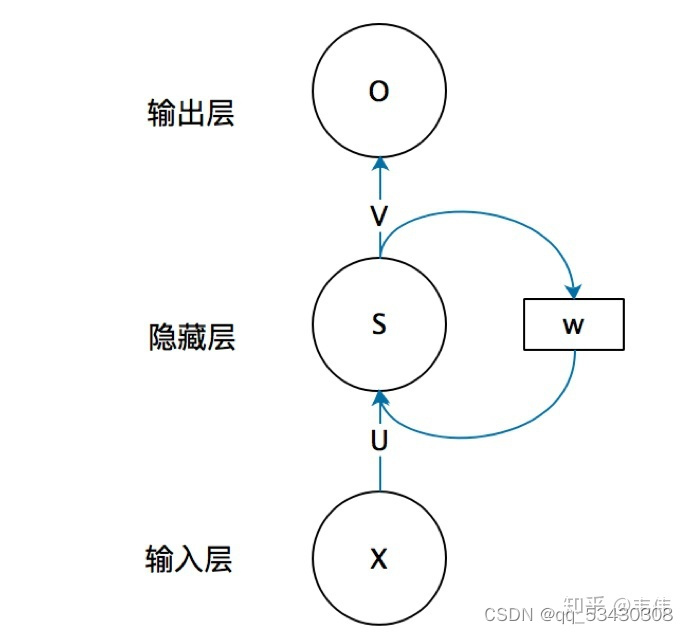
展开结构如下:

参数共享:
Wo 、Ws 、Wx 为参数,通过梯度下降不断更新,三个参数在一个神经单元(cell)中是共享的
在 t 时刻:
输入为
该时刻记忆:
输出为 :

即:t时刻的输出不仅与当前时刻的输入有关,还与前一时刻的记忆有关
2、存在的问题——梯度消失和梯度爆炸
对t3时刻的代价函数求偏导:
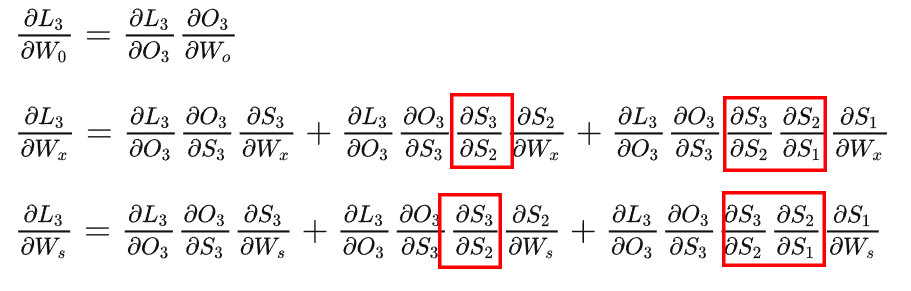
通过上式可推导出任意时刻对Wx、Ws求偏导的一般公式:

Ws同理。
又因为:
![]()
所以:
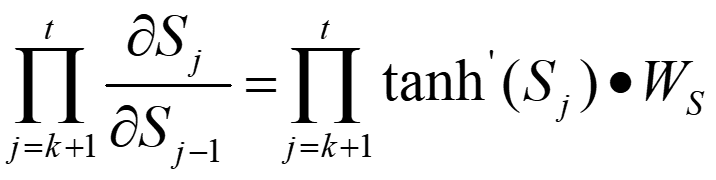
即在反向传播过程中对Wx和Ws求偏导时会乘以tanh函数的导数,网络层数越深乘上的导数越多。这是因为St随着时间序列向前传播,而St又是Ws、Wx的函数
又因为如下图所示tanh函数的导数不大于1
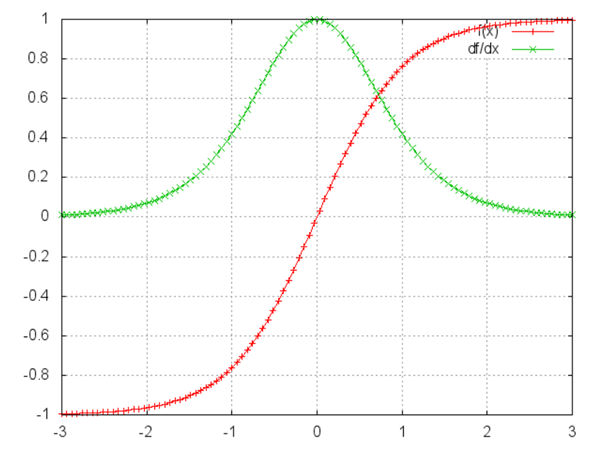
因此当Ws也是一个大于0但是小于1的数时,越深的层中较远的层的信息就会越趋近于0,即梯度消失
当Ws是一个足够大的数时,越深的层中较远的层的信息就会越趋近于正无穷,即梯度爆炸
(RNN中的梯度消失不是指损失对参数的总梯度消失了,而是RNN中对较远时间步的梯度消失了)
在神经网络中使用较小梯度进行更新的层会停止学习,导致RNN会忘记过早的内容,因此称其为具有短时记忆的神经网络
解决方案:RNN的变体LSTM、GRU
变体一:Long Short-Term Memory (LSTM)长短期记忆网络
相比于原始的RNN的隐层(hidden state), LSTM增加了一个细胞状态Ct(cell state)
下图表示 t 时刻的输入输出:
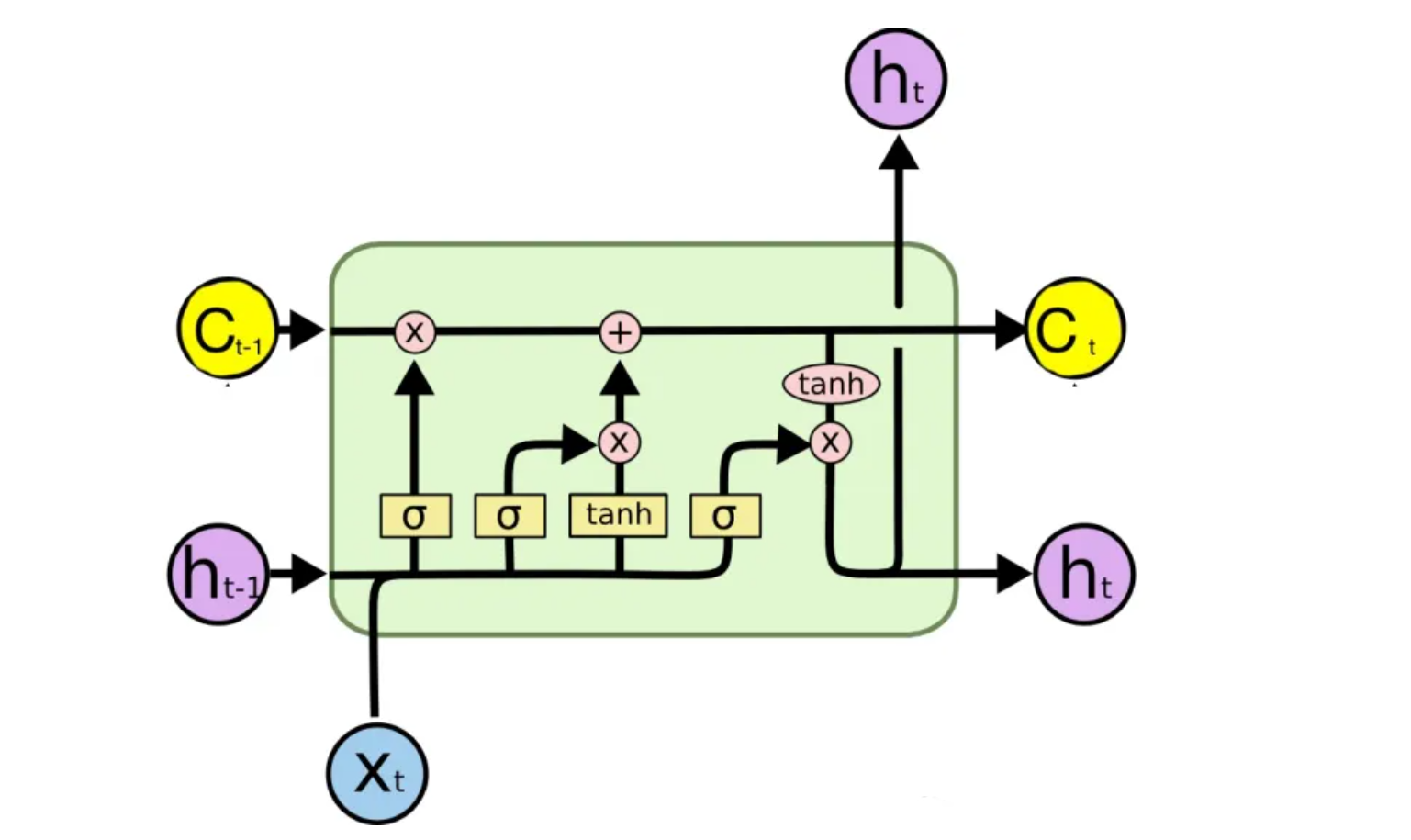
解释:
神经网络(黄色方框):
表示一层神经网络,也就是w^T x + b的操作。区别在于使用的激活函数不同,σ表示的是softmax函数,他是将数据压缩到[0,1]范围内,如下图所示;tanh表示的是双曲正切激活函数,他把数据归一化到[-1,1]之间
细胞状态Ct(黄色圆圈):
t-1 时刻的细胞状态Ct-1,通过上一时刻的隐层状态ht-1与当前时刻的输入Xt进行适当的修改(具体操作为通过遗忘门与输入门进行计算,见下文)得到当前时刻的细胞状态Ct,如下图所示:
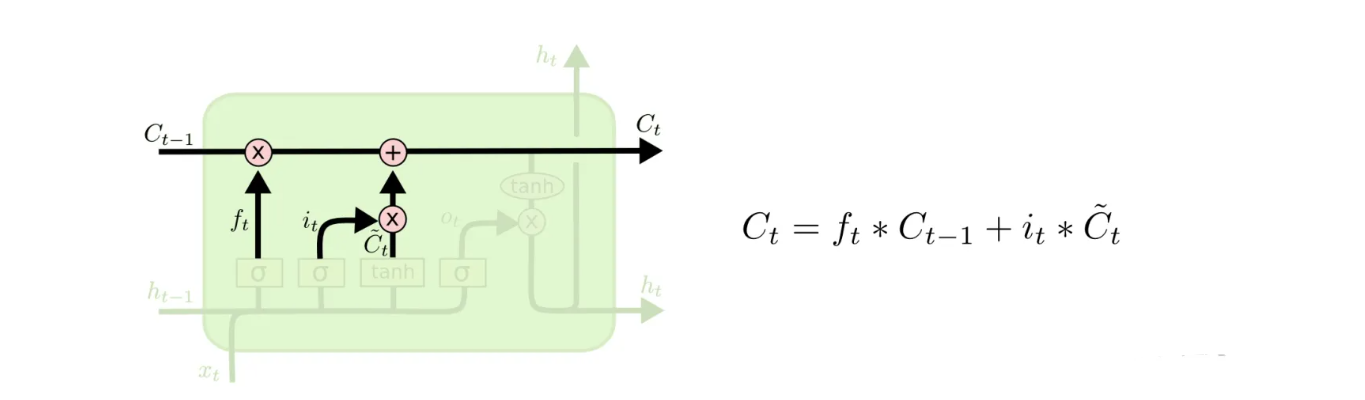
此外,Ct会参与当前时刻的隐层输出ht的计算
隐层状态ht(紫色圆圈):
t -1 时刻的隐层状态ht-1,通过“门”对细胞状态Ct进行修改,并参与计算当前时刻的细胞状态Ct
ht不仅是由上一个状态,和本次的输入所决定,还有一个细胞状态Ct-1,这是其与RNN最大的不同
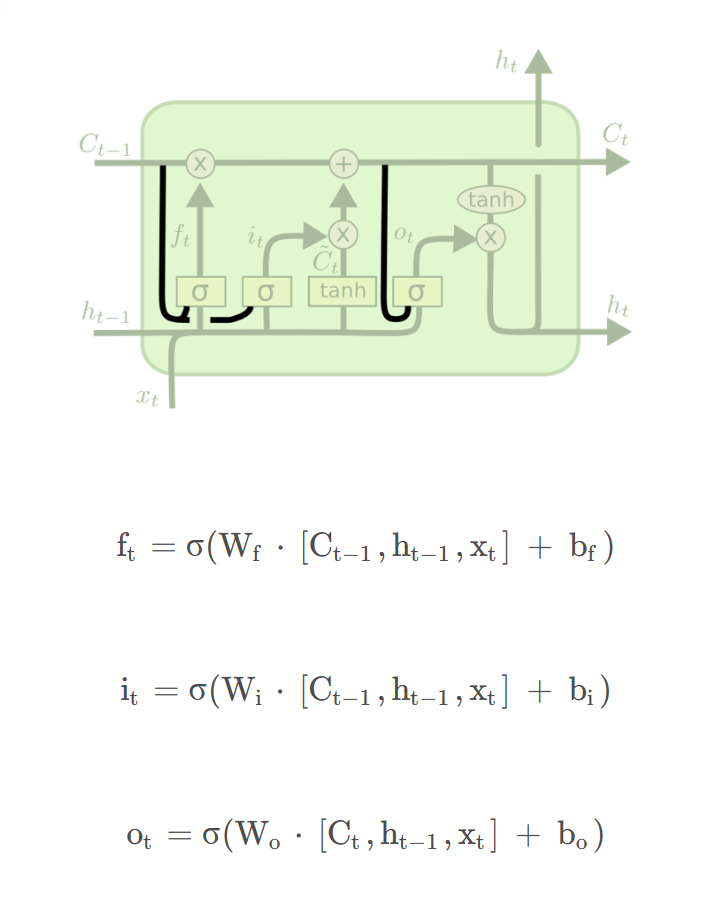
LSTM的三扇门(均包含sigmoid函数):
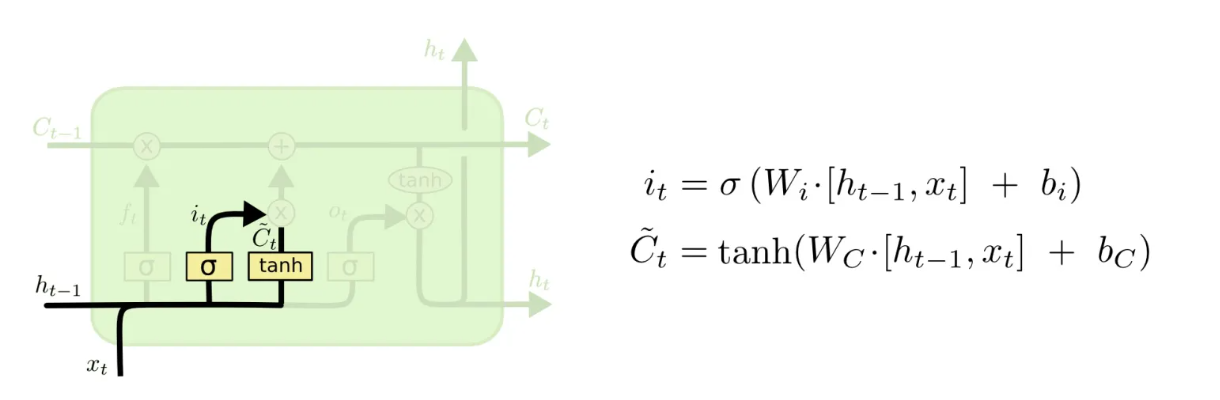
输入门:
选择保留部分当前输入的信息,输入前一层的信息,接近1的信息表示更为重要
其次还要将前一层隐藏状态的信息和当前输入的信息传递到 tanh 函数中去,创造一个新的侯选值向量。最后将 sigmoid 的输出值与 tanh 的输出值相乘,sigmoid 的输出值 it 将决定 tanh 的输出值中哪些信息是重要且需要保留下来的
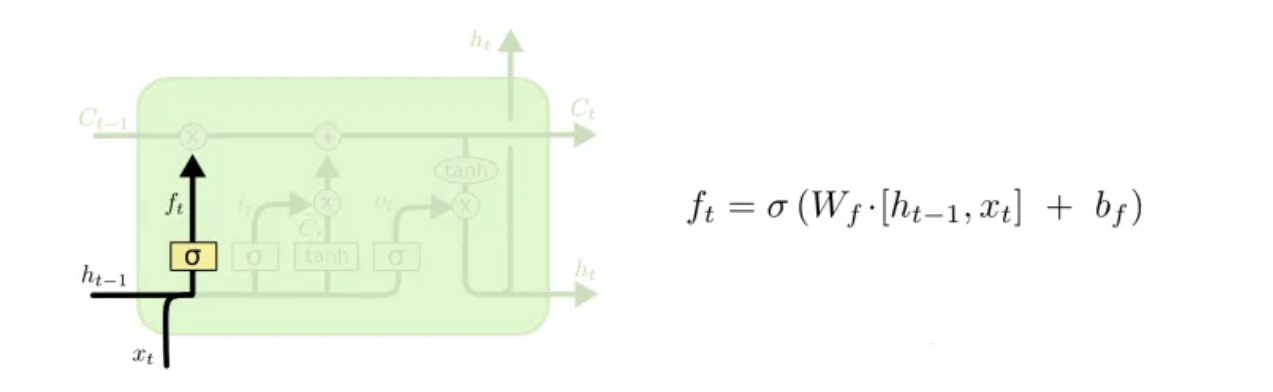
遗忘门:
选择丢弃哪些细节
越靠近1的信息越可能被保存,越接近0的信息越可能被遗忘。下图中遗忘门的输出ft与上一时刻的细胞状态Ct相乘即可选择遗忘哪些细节。
输出门:
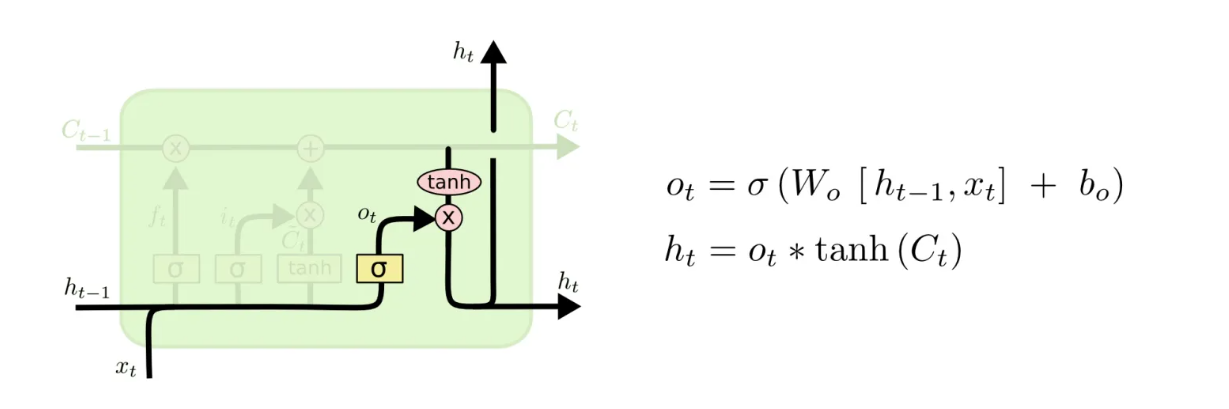
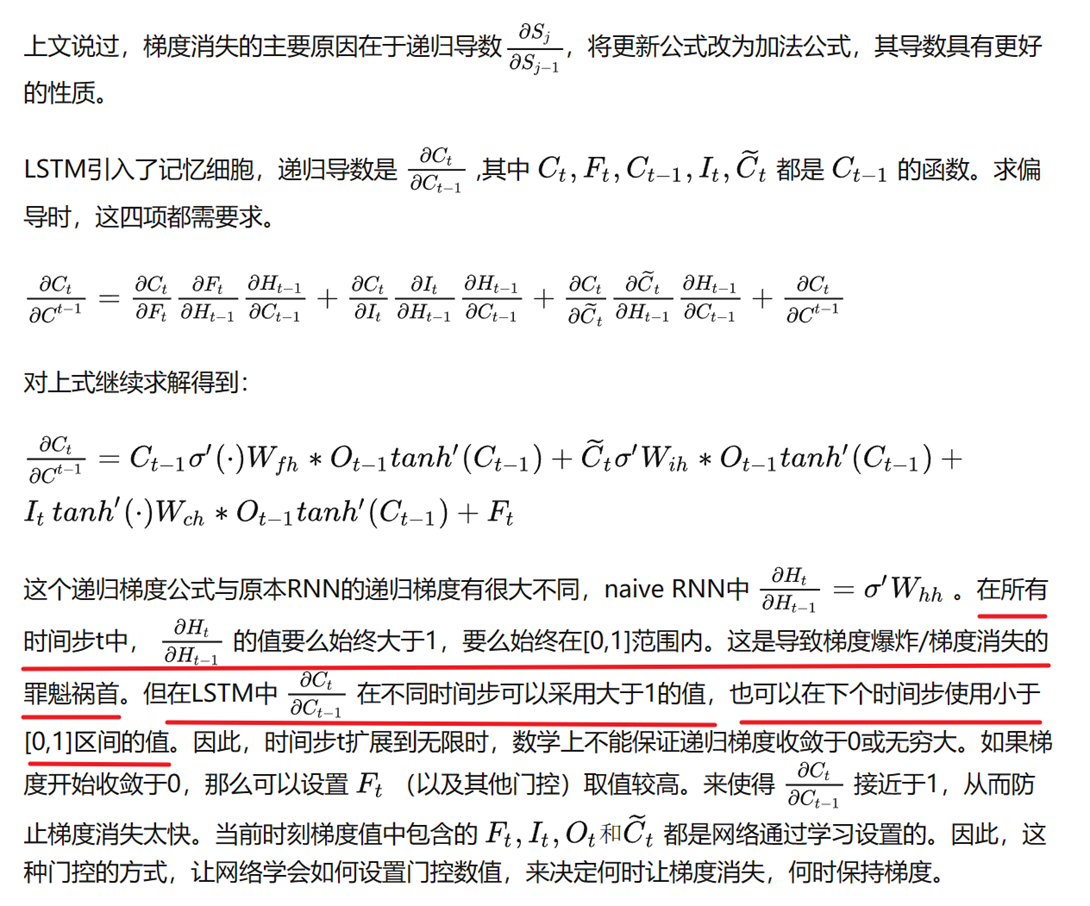
LSTM为什么能够解决梯度消失和梯度爆炸:
LSTM的变式:带窥孔的LSTM:
构建LSTM(用于NILM):
1. Input (length determined by appliance duration)
2. 1D conv (filter size=4, stride=1, number of filters=16, activation function=linear, border mode=same)
3. Bidirectional LSTM (N=128, with peepholes)
4. Bidirectional LSTM (N=256, with peepholes)
5. Fully connected (N=128, activation function=TanH)
Python实现:
# Creates the RNN module described in the paper
model = Sequential() #顺序模型,即通过一层层神经网络连接构建深度神经网络
# 1D Conv 一维卷积层
model.add(Conv1D(16, 4, activation="linear", input_shape=(time_stamp,1), padding="same", strides=1))
#Bi-directional LSTMs
model.add(Bidirectional(LSTM(128, return_sequences=True, stateful=False), merge_mode='concat'))
model.add(Bidirectional(LSTM(256, return_sequences=False, stateful=False), merge_mode='concat'))
# Fully Connected Layers
model.add(Dense(128, activation='tanh'))
model.add(Dense(1, activation='linear'))
model.compile(loss='mse', optimizer="adam")
变体二:Gate Recurrent Unit(GRU)门控循环单元
介绍:
GRU为新一代的循环神经网络,与LSTM类似
但是去掉了细胞状态Ct,使用隐藏状态来进行信息的传递,只包含更新门和重置门
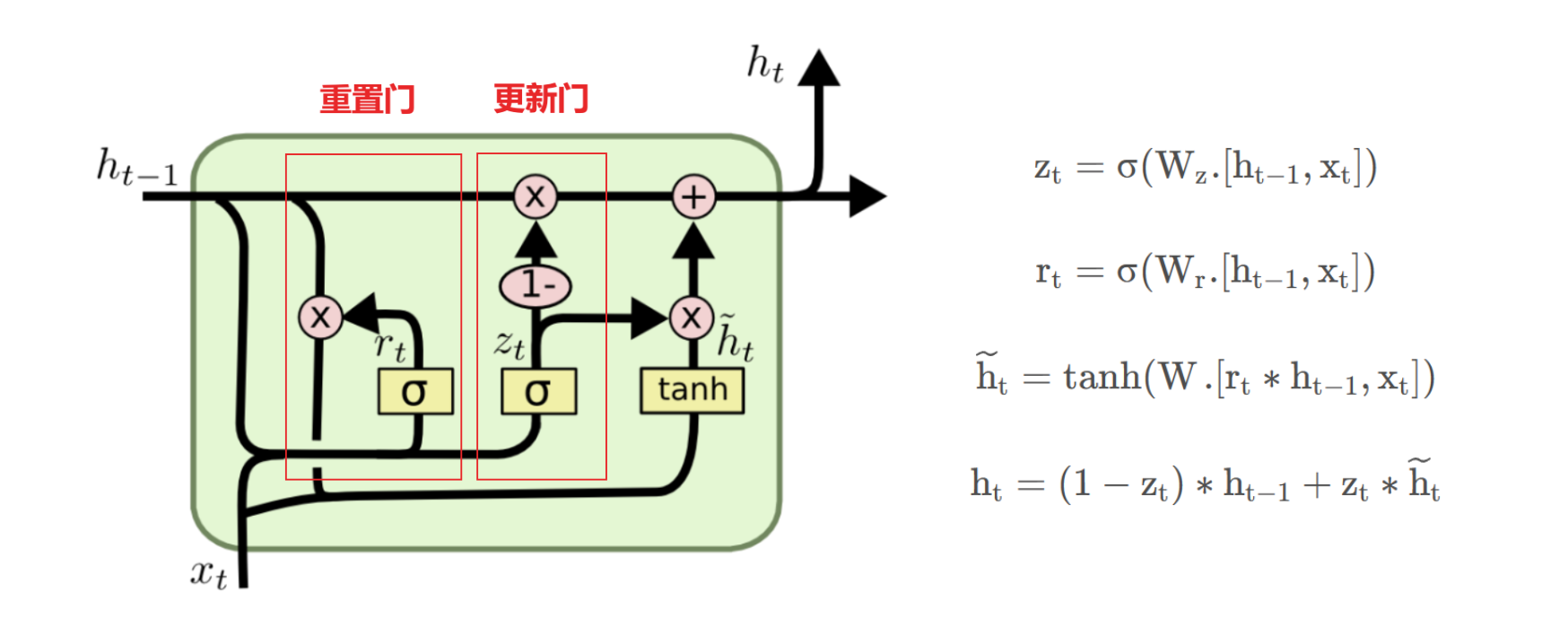
更新门:
GRU将LSTM中的输入门与遗忘门合二为一,称为更新门,用于控制前一时刻传递来的信息有多少能够被继续保留
重置门:
选择一定的信息丢弃(遗忘)
GRU的优势:
GRU的参数量少,减少过拟合的风险
LSTM的参数量是Navie RNN的4倍,参数量过多就会存在过拟合的风险,GRU只使用两个门控开关,达到了和LSTM接近的结果。其参数量是Navie RNN的三倍
GRU的构建:
model = Sequential()
# 1D Conv
model.add(Conv1D(16, 4, activation="relu", padding="same", strides=1, input_shape=(time_stamp,1)))
#Bi-directional GRUs
model.add(Bidirectional(GRU(64, activation='relu', return_sequences=True), merge_mode='concat'))
model.add(Dropout(0.5))
model.add(Bidirectional(GRU(128, activation='relu', return_sequences=False), merge_mode='concat'))
model.add(Dropout(0.5))
# Fully Connected Layers
model.add(Dense(128, activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(1, activation='linear'))
model.compile(loss='mse', optimizer="adam")概括:
LSTM和CRU都是通过各种门函数来将重要特征保留下来,这样就保证了在long-term传播的时候也不会丢失。此外GRU相对于LSTM少了一个门函数,因此在参数的数量上也是要少于LSTM的,所以整体上GRU的训练速度要快于LSTM的,但仍要根据具体场景选择。

















 627
627

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









