



 本文介绍了如何在正点原子Zynq7010开发板上为手柄添加驱动,包括在内核中集成驱动的方法,以及编译并加载驱动模块joydev.ko的过程,提供了详细的步骤和解决常见问题的技巧。
本文介绍了如何在正点原子Zynq7010开发板上为手柄添加驱动,包括在内核中集成驱动的方法,以及编译并加载驱动模块joydev.ko的过程,提供了详细的步骤和解决常见问题的技巧。
平台与源码素材均来自正点原子领航者Zynq7010开发板
手柄发射器插上开发板后,在/dev/input/下没有js*设备挂载,说明内核没有手柄驱动。添加驱动有两种方法
方法一:在内核中添加驱动
博主使用的是正点原子《zynq之linux开发》第八章中的源码(添加过lcd驱动与设备树)以及编译好的SDK,内核编译流程参照第二十章的教程步骤。
编译期间遇到没有mkimage命令的报错,解决方法如下
找不到 mkimage 命令_mkimage命令找不到-优快云博客 https://blog.youkuaiyun.com/landishu/article/details/72630439先defconfig将内核设置为默认配置
https://blog.youkuaiyun.com/landishu/article/details/72630439先defconfig将内核设置为默认配置
然后make menuconfig手动添加我们想要的驱动
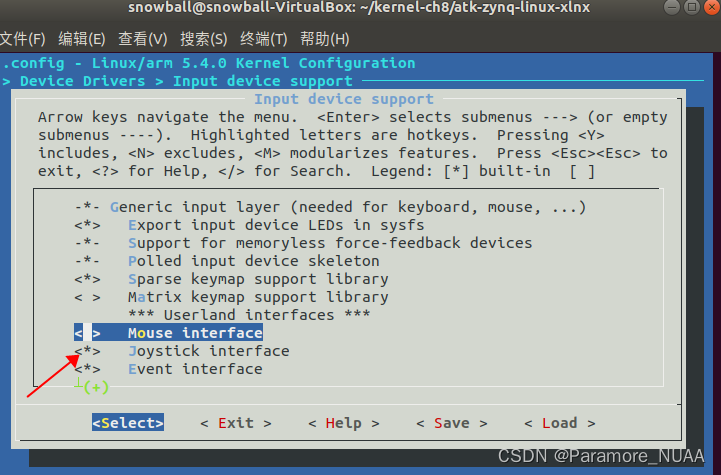
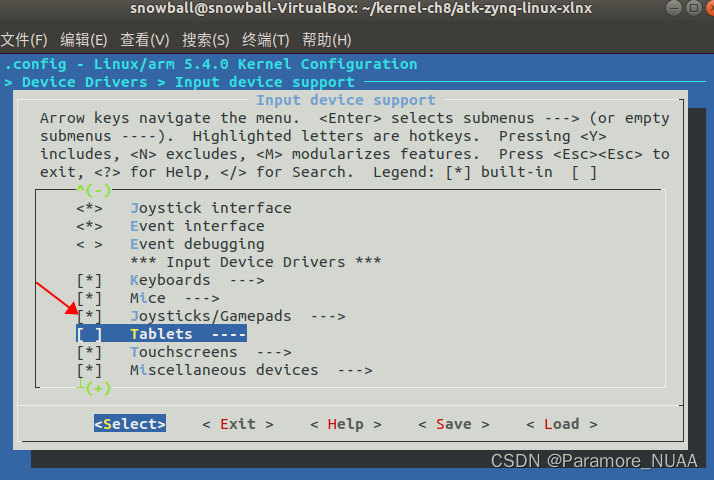
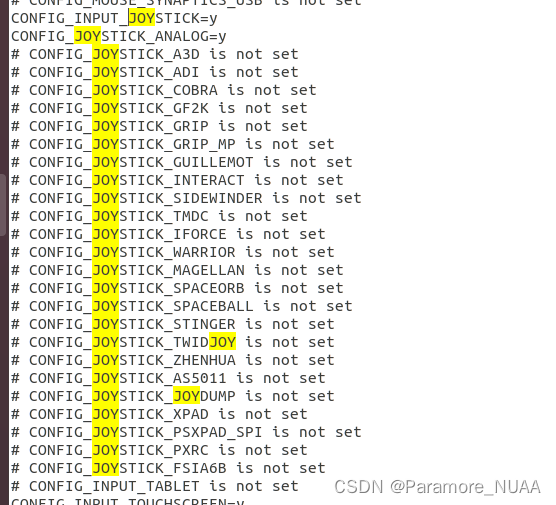
Device Drivers--->Input device support,分别选择Joystick interface和Joysticks/Gamepads
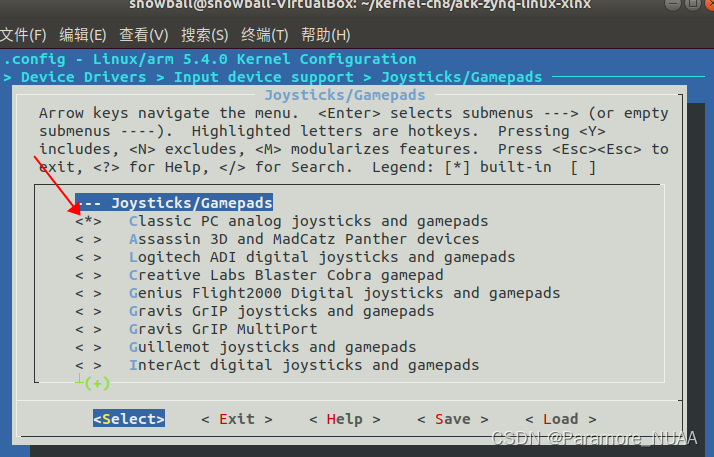
Joysticks/Gamepads的下一级菜单根据你接入的手柄去选择
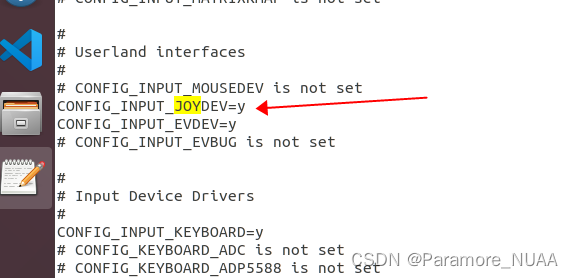
保存后退出,可以查看.config文件(在源码目录下的一个隐藏文件)来看配置是否正确保存
配置正确保存后就可以编译源码生成镜像了(不要再defconfig否则会恢复默认配置)
用新镜像启动开发板,查看/dev/input/下就有js0了,可以通过joystick去测试手柄
sudo apt-get install joystick 安装
安装完后,启动软件进行测试
jstest /dev/js0 或者 jstest /dev/input/js0
方法二:编译驱动模块joydev.ko文件,手动加载驱动
获取joydev.c驱动源码,博主使用的源码路径在“源码包/driver/input”
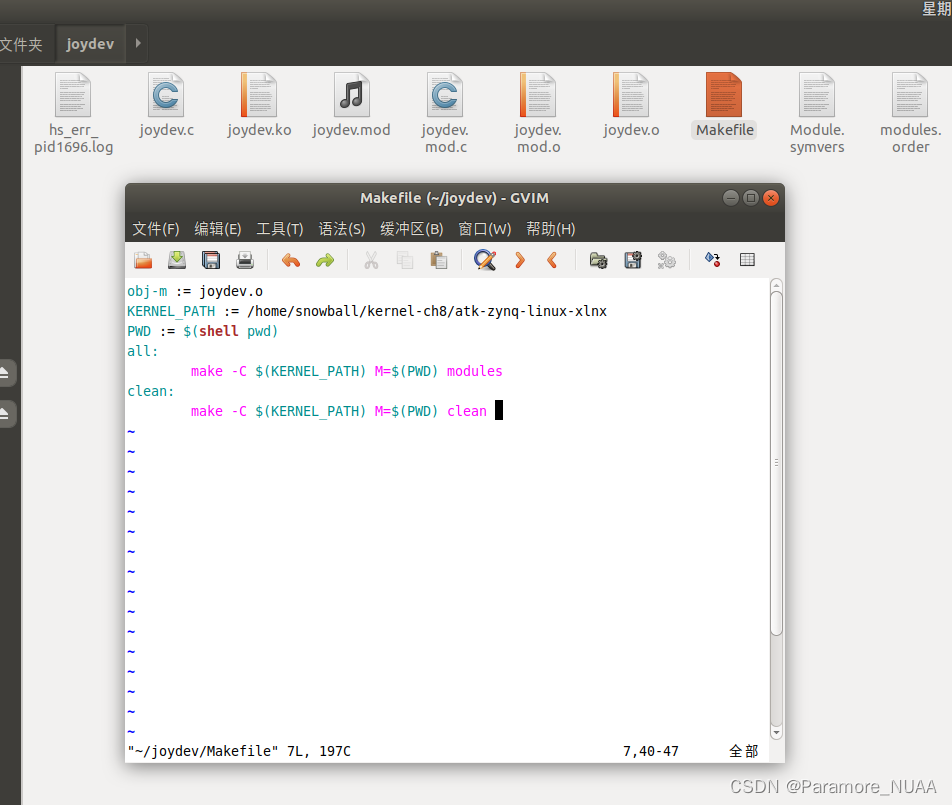
编写makefile,第二行为源码包路径,根据自己的路径填写
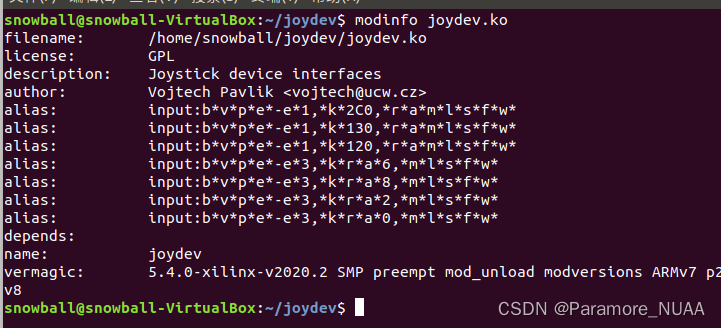
make编译生成joydev.ko,用modinfo查看.ko详细信息,请确认vermagic与你的板子的一致,是否有一些需要提前安装的依赖depends
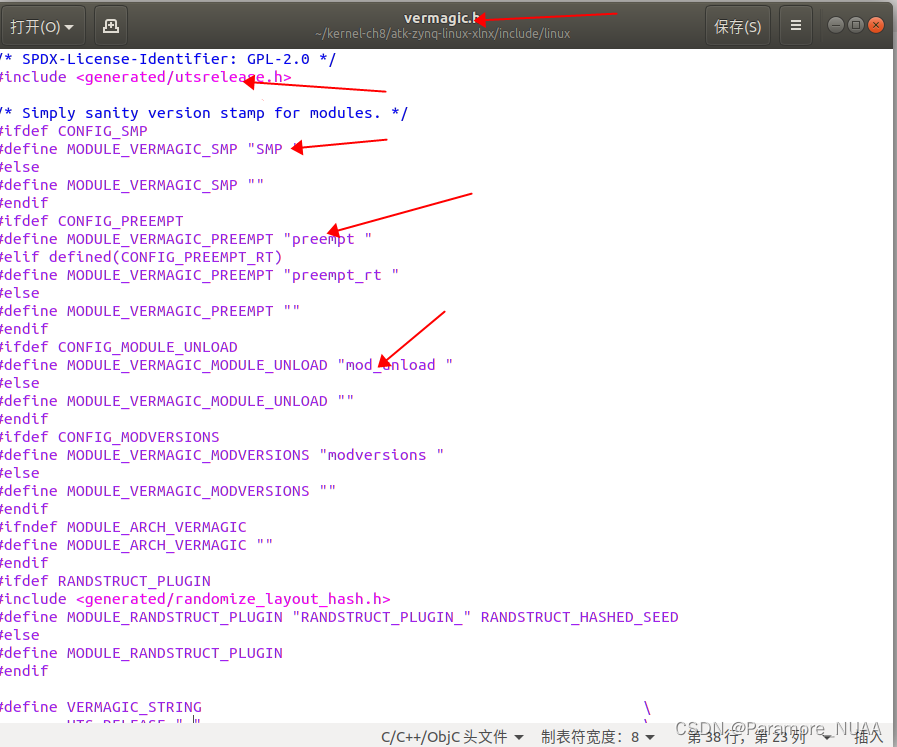
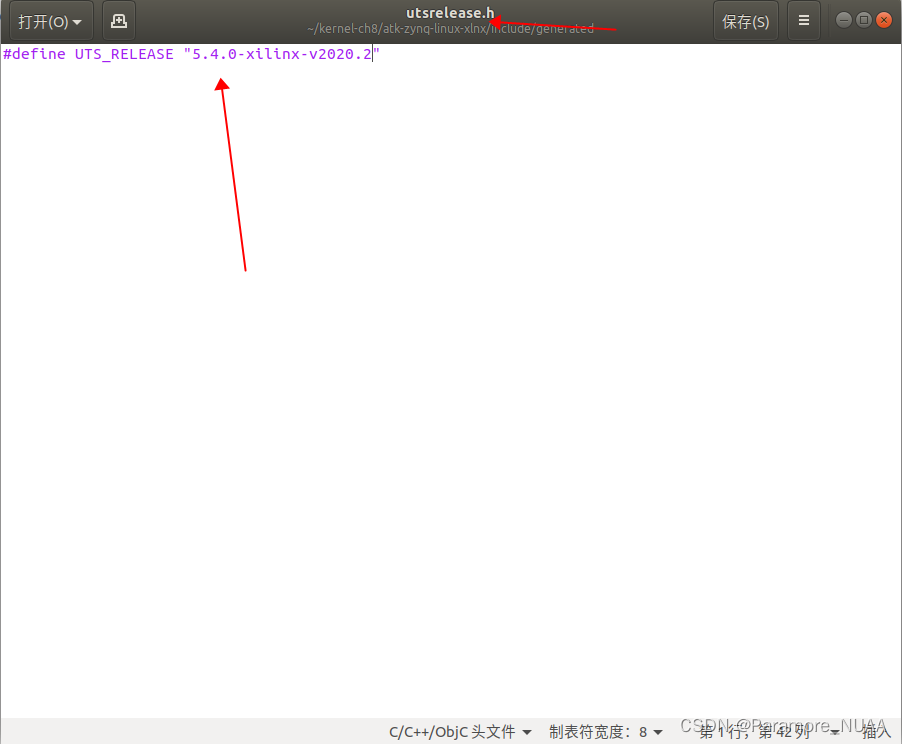
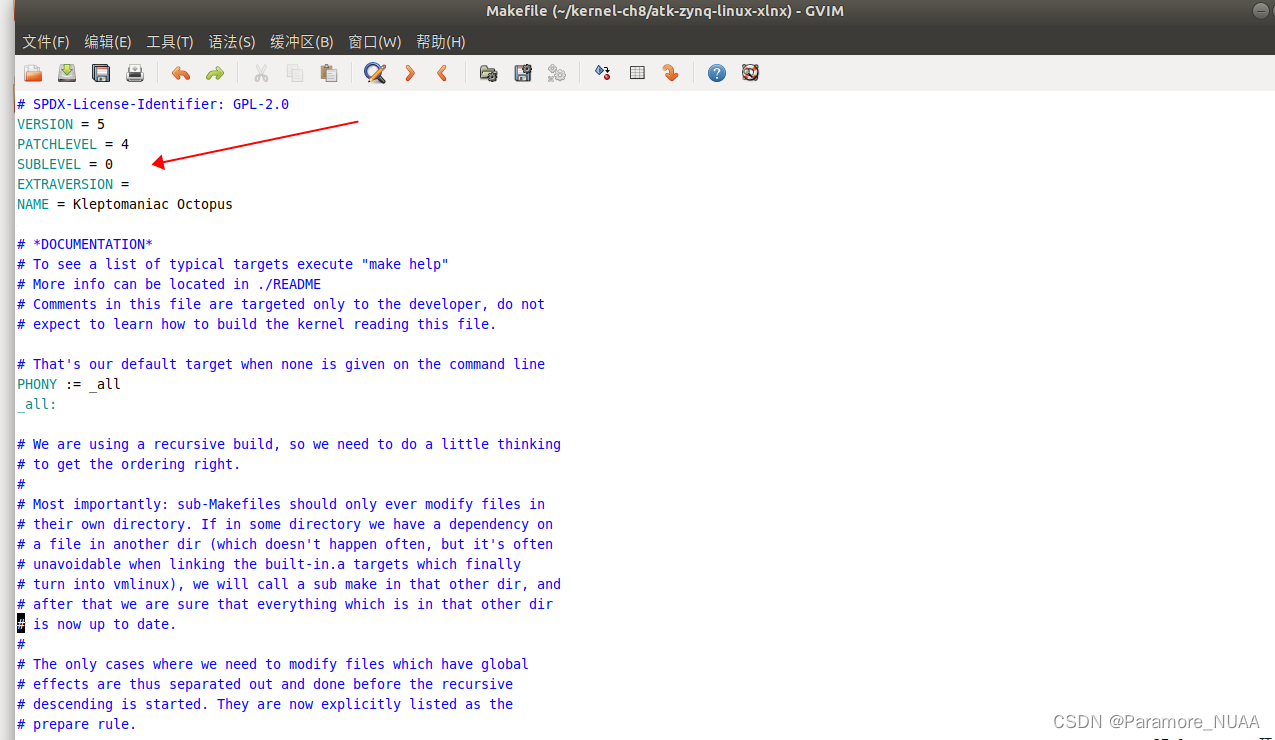
vermagic的修改位置:
1、源码包/include/linux/vermagic.h文件;
2、源码包目录下的makefile文件
以上两种方法二选一,不要同时修改
将.ko放到板子上,加载方法如下

















 555
555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









