



基于二维码和无人机监控的开放临时停车场智能停车系统设计——模块仿真
摘要
为解决开放临时停车场停车效率低和管理不善的问题,设计了一种基于二维码和无人机监控技术的智能停车系统。该系统由四个模块组成:停车位二维码模块、无人机摄影模块、数据处理模块和用户界面模块。通过软件编程实验,对系统中各模块进行了功能仿真。通过定点无人机拍摄实现二维码的捕获。主系统采用Python编程,能够成功解码二维码,收集停车位的占用状态并及时更新状态。然后,用户界面模块通过使用Autoit3编写的程序,以不同颜色显示停车状态,帮助用户做出停车位选择决策。结果表明,该系统具有良好的用户友好性,可在短时间内以低成本部署,并在持续运行一段时间后保持稳定。同时,停车位的占用状态能够被准确且便捷地检测和记录,表明该技术在未来将具有广泛的应用前景。
关键词 :开放临时停车场;智能停车系统;二维码技术;无人机监控;快速部署
I. 引言
在过去几年中,机动车和驾驶员的数量空前增长,对临时停车位的需求也日益增加。然而,缺乏有效的停车管理导致了低效的停车管理问题、严重的二次寻车困扰、车辆拥堵以及交通混乱,这些问题使得当前运营的开放空间停车场面临严峻的管理和解决挑战。一种能够有效识别停车位、合理分配车位并减少寻车时间的智能停车系统显得尤为迫切。[1–6]
现有应用的技术包括超声波检测、红外线检测、地磁检测、射频识别、视频计检测、车牌识别,近年来已被设计并广泛应用于机动车停车场。然而,超声波检测系统存在较高的功耗和昂贵的安装和维护成本;红外线和地磁检测系统易受环境影响;而射频识别在临时停车场中的应用和维护过于复杂。此外,视频计依赖于摄像头的视角性无法保障,且不同车辆的车牌可能存在遮挡或污损情况。因此,现有的车牌识别技术普遍存在识别率较低、成本较高等问题。[7–12]
此外,多数系统需要较长的安装时间和人力进行部署,难以适用于短期使用的停车场。然而,针对临时开放空间、能够以低成本提升停车效率并具备快速部署能力的智能停车系统仍亟待开发。[4]
无人机是一种自主飞行、可控性强且能够执行多种任务的无人驾驶飞行器。由于其灵活性高、成本低、操作方便和机动性强等特点,使其在救援、摄影、环境监测和通信中得到了广泛应用。[13–14] 基于无人机的优势,提出了一种基于二维码和无人机监控技术并结合软件编程的智能停车解决方案,用于模块功能验证,旨在解决当前临时停车位中的停车问题。所设计的停车系统相比传统系统能够更快、更低本地部署。因此,该系统能够识别并记录停车位的占用状态,并长期稳定运行。这些特点使该系统具备良好的应用前景。[15–17]
II. 系统总体设计方案
A. 系统设计规范
为开放临时停车场设计的智能停车系统由四个模块组成:停车位二维码模块、无人机摄影模块、数据处理模块和用户界面模块,如图1所示。

图1. 开放临时停车场智能停车系统示意图
具体流程如下:首先,每个停车位设置一个二维码,用于标识其唯一身份。当车辆停放时,会遮挡该二维码;当车位空闲时,二维码暴露在外。无人机在二维码上方悬停并拍摄二维码以识别停车位的占用状态:当停车位被占用时,车辆会遮挡该位置的二维码,导致无人机无法捕捉到该码;反之,当停车位空闲时,二维码暴露在外,无人机可成功捕捉到二维码。
然后,无人机通过实时无线传输技术将拍摄到的数据传送给数据处理模块,由数据处理模块识别接收到的数据,并更新在服务器运行的状态文件中的停车位占用状态。如果某个二维码在一段时间内连续未被拍摄到,系统将把该码对应的停车位状态更新为“已占用”。
随后,用户界面模块读取并处理状态文件,通过图形化用户界面将处理后的数据显示给用户。识别停车位状态的过程如图2所示。

图2. 停车位检测及更新流程图
B. 模块功能简介
在该系统中,每个停车位配备两个二维码——一个地面二维码和一个墙面二维码——分别编码有相同的停车位编号。地面二维码位于停车位中央,建议尺寸为停车位面积的0.9倍。墙面二维码放置在停车位的一个角落,用于引导车辆停放。可使用防水防尘材料制作二维码,以确保系统在户外环境下能正常运行。这些二维码可采用一次性打印方式,具有成本低、部署快、停车场改造周期短以及易于更换的优点。
无人机摄影模块由若干架无人机和多个电池组成。当模块工作时,至少有一架无人机在空中悬停,另一架无人机在完成充电后处于空闲状态,准备接替充电任务。悬停的无人机由地面控制系统远程操控,按预定路线在停车场上空匀速飞行,在精确定位后使用高清摄像头拍摄地面图像,然后通过实时无线传输技术将图像数据发送至数据处理模块。如果悬停无人机的电池电量低于临界值左侧,系统将向数据处理模块发送指令,同时该无人机返回无人机基地。数据处理模块接收指令后,将启动另一块电池充足的无人机升空悬停。无人机悬停及监控过程如图3所示。

图3. 无人机悬停及监控流程图
随后,由软件在数据处理模块中对接收的二维码图像进行解码和处理。数据处理模块根据二维码中解码的信息更新状态文件——如果成功解码,表示该停车位为空闲;如果无人机在一个飞行周期内未捕捉到二维码,数据处理模块将该停车位的状态更新为“已占用”。当用户扫描角落放置的墙面二维码时,用户界面模块识别二维码中编码的信息并将之传送给数据处理模块。数据处理模块也将该停车位的状态更新为“已占用”,并在应用程序中为用户记录该停车位。停车位状态更新的过程如图5所示。
随后,用户界面模块读取状态文件,并通过图形化用户界面将信息展示给用户。该图形化用户界面是一个简化的停车场地图,用不同颜色显示各个停车位的状态。用户界面模块还能收集车辆停放位置数据,以推荐最合适的停车位,并根据停车位附近设施的偏好推荐相应的停车位。当用户扫描角落放置的墙面二维码时,用户界面模块将解码信息并把该停车位的状态更新至数据处理模块。同时,用户界面模块用特定颜色标记该停车位,以便车辆根据指示停车。用户登录使用智能停车系统的流程如图6所示。
在实际应用中,车辆可通过以下几种方式使用智能停车系统,如图7所示。
图7. 智能停车系统示意图
情景1 :如果车辆A是新用户,首次进入停车场时可扫描入口处放置的应用程序二维码,并通过手机号注册。摄像头将拍摄车辆A的车牌号码,并将其与云端数据库进行比对,同时应用程序将绑定车辆A的车牌号码。绑定完成后,应用程序将获取权限,以同步车辆A的实时位置至云端服务器。
情景2 :如果车辆A之前使用过该系统,则无需再次扫描应用程序码。入口处的摄像头将自动识别车辆A的车牌并同步至云端服务器。系统随后将开启应用程序的开放接口,通过通用通信协议将位置数据推送至用户的手机。车辆A打开程序后,程序将获取设定的位置数据,并将其实时位置同步至云端服务器。
情景3 :用户界面模块根据数据处理模块中服务器的状态,以不同颜色显示停车位,如图7中的l,m,和n所示。
情景4 :用户界面模块同步车辆位置数据,读取并显示其最近车辆的位置(如图7中的车辆#、车辆$和车辆%),然后在应用程序中记录车辆A的位置,以帮助车辆A选择合适停车位,如图7中的h和i所示。应用程序将使用绿色标记并推荐距离其最近的空闲车位(如图7中的l所示),并将偏好附近功能区的车位标记为蓝色(如图7中的a和b所示),供车辆A选择。当车辆A选定一个车位后,应用程序将通过语音导航提供最优路径,并展示预计行驶时间,如图7中的l所示。
情景5
:停车后,车辆A扫描墙面二维码;用户界面模块将二维码信息上传至数据处理模块,并结合对车辆A位置的采集。用户界面模块显示车辆A的停车……
……位置,并在地图上用红色标记,完成停车记录。
III. 系统功能模块仿真
在本次仿真实验中,选取图7中由彩色方格组成的场地作为仿真场景。具体而言,设计并打印出12个带有不同是否有车辆图像信息的二维码,并将其实地粘贴在模拟停车位相应位置(如图8B所示),并选用Spark进行无人机拍摄,然后通过自研软件实现数据处理和结果显示,以对各模块的基本功能进行初步仿真。具体实验流程如下。

图8. Spark拍摄的模拟停车场和二维码
A. 无人机控制与调度
启动仿真系统后,Spark可通过其配套软件进行遥控。在本系统中,以Spark点系统作为无人机的飞行控制终端,能够精确控制无人机飞行至指定位置并在该处拍照。Spark拍摄的模拟停车场和二维码如图8所示。
当无人机电池电量低时能够自动返航。然而,由于Spark控制应用程序无法将旁路电量信息传送至外部设备,目前尚无法构建双无人机监控系统。
B. 数据处理模块功能仿真
编写了一个程序,主要用于实现二维码的识别与解码、停车位状态记录,以及长时间未被检测到的停车位状态更新。
具体而言,Scan.py 实现了二维码识别与解码以及停车位状态记录;Time.py 实现了长时间未被识别的停车位状态更新;Sun.py 程序为主程序,以30秒为间隔同时运行 Scan.py 和 Time.py。
具体实现中,该系统的软件由Windows 10操作系统和Python 3.8.9组成。通过pip命令安装了多种Python库,如OpenCV和NumPy。具体而言,使用OpenCV检测并解码图像中的二维码,以获取停车位编号信息。此外,结合Python内置库json使用OpenCV来选取并显示二维码图像,尽管OpenCV和json不具备识别和解码二维码的功能,但用于图像预处理。在实际应用场景中,仅使用OpenCV即可完成识别和解码。
Scan.py 用于记录停车位的状态。Scan.py 通过“open”函数打开临近时间的文件,该文件是通过使用“with open”函数反复写入文件的时间戳获取的。在 Scan.py 使用 OpenCV 识别二维码后,对应停车位的状态将被更新至 Result.txt(即状态记录文件)中。Result.txt 的内容如图9所示,其中,“001”和“002”为停车位编号;“y”和“n”分别代表车位状态“vacant”(空闲)和“occupied”(已占用)的缩写;“2021-09-12 12:18:29”为数据处理模块识别对应二维码的时间。
图9. Result.txt的内容
用户界面模块的软件 Hui.exe 使用 Autoit3 编写并编译,其中 Constants.au3、WindowsConstants.au3、MessageBoxConstants.au3 和 ColorConstants.au3 被用于辅助编译过程。具体而言,Hui.exe 从云端服务器读取 Result.txt,以识别停车位的状态,并使用不同颜色标记不同的停车位。通过颜色区分,用户能够直观了解每个停车位的状态。由于在模块仿真过程中仅验证了基本功能,未应用GPS,因此未能实现对其最近空闲车位位置的获取以及将选定车位标记为绿色的功能,仅有空闲车位统一显示为蓝色和灰色。仿真停车位的识别结果如图10 C所示。
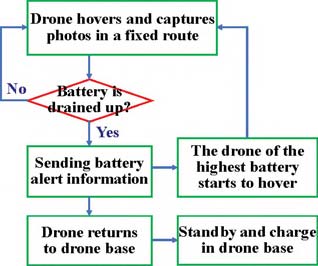
图10. A:识别的二维码;C:以不同颜色识别的停车位
Time.py 作为停车位状态的更新程序,运行时读取 Result.txt 文件,生成一个表格,其中每一行对应一个停车位,其数据内容与Scan.py相同,并检查该行内时间字段是否为最新。具体而言,Time.py 识别图9表格中的停车位状态变化:若为“n”,则该行保持不变;若为“y”,程序将继续通过“time”库中获取年、月、日、时、分、秒等时间信息,并将其与 Result.txt 中记录的时间进行对比。若两者时间差小于或等于30秒,该行保持不变,程序继续检查下一行;若时间差大于30秒,则将该行状态“y”及其后续时间字段均更新为“n”,然后程序继续检查下一行。依此循环。流程如图11所示。通过该过程识别出的二维码如图10 A所示。

图11. 状态更新过程的流程图
C. 系统状态更新
该系统基于云端服务器与客户端之间的数据传输机制来传递信息并更新系统状态。当 Scan.py 识别二维码并生成 Result.txt 后,系统通过文件传输协议(FTP)将该文本文件同步至云端服务器。
D. 用户界面数据反馈设计
用户界面模块集成在用户界面中,能够读取停车位状态记录文件,获取信息并更新用户期望车位状态。该模块根据停车位状态记录文件判断车位是否已占用,然后用不同颜色标记各个车位以显示其状态。该模块还根据停车场布局的设施为用户推荐合适车位。
E. 仿真总结
模块仿真的结果表明,本研究设计的智能停车系统能够在短时间内快速、便捷地部署,并稳定运行,不受空闲停车位数量变化的影响。因此,该系统能够成功识别并记录停车位的占用状态,操作简便,可长时间稳定运行,在连续24小时的运行中未出现程序崩溃,期间系统与云端服务器保持了快速稳定的通信。
综上,各模块功能仿真达到了预期目标,可用于临时开放空间的智能停车系统。
IV. 结论
随着临时停车需求的增长,由于开放空间临时停车场的停车效率低下和管理不善,导致车辆寻位困难、交通拥堵、资源浪费和空间闲置等问题。然而,当前可用的智能停车解决方案在应用于开放临时停车位时存在诸多局限。因此,亟需开发一种专为开放临时停车位设计的新型智能停车解决方案。
在本研究中,采用二维码识别和无人机监控技术来实现智能停车,解决上述问题,并满足系统快速部署和易于管理的需求,以便在各类停车场中便捷使用。该停车系统由四个模块组成,即停车位二维码模块、无人机摄影模块、数据处理模块和用户界面模块。仿真实验表明,通过定点无人机拍摄获取的二维码可以被成功解码,并可通过自行设计的Python程序成功采集和更新停车位状态。然后,通过使用Autoit3编写的程序以不同颜色显示停车状态,帮助用户合理选择停车位。因此,实现了车位可视化、快速部署、无人值守、停车位智能推荐以及停车后车位记录的智能停车场管理,达到了预期设计目标。相较于传统停车场系统,该系统效率更高;相较于其他智能停车系统,该系统具有快速部署、成本低、结构灵活和易于维护的优点。
因此,通过固定无人机,可实现1080P实时图像传输,并支持一架空闲无人机持续接替;这些功能将使系统更加集成化、智能化和无人化。无人机还可作为监控摄像头使用,具有更广的视野和更高的覆盖度,便于停车场的管理。未来还将进行更多实地测试,以确保整个系统在现实环境中无故障运行,包括无人机在不同天气条件下识别二维码的可行性、系统负载能力测试、个人数据保护、通信安全等。
总之,该技术展现出明显的创新性和广阔的应用前景,值得进一步深入研究。

















 5407
5407

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









