







目录
概述
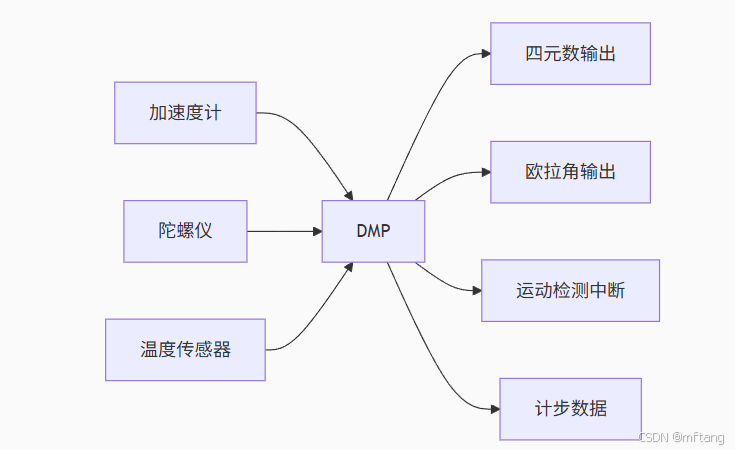
数字运动处理器(Digital Motion Processor,DMP)是 MPU6050 传感器中的嵌入式协处理器,能够独立处理传感器数据,实现高级运动处理功能,显著减轻主处理器的计算负担。
1 DMP的功能和实现原理
1.1 DMP 核心功能
1) 硬件级姿态解算
实时计算四元数
输出欧拉角(俯仰/滚转/偏航)
自动校准传感器偏差
2) 内置运动检测
手势识别(摇动、点击、翻转)
自由落体检测
运动唤醒功能
计步器功能
3) 传感器融合
加速度计 + 陀螺仪数据融合
可选磁力计融合(9轴)
自适应滤波算法
4) 低功耗优化
自主数据处理
可配置唤醒条件
中断驱动操作
1.2 DMP 工作原理
2 DMP 实现步骤
2.1 加载 DMP 固件
// DMP固件加载函数
int load_dmp_firmware(const struct device *dev)
{
uint8_t firmware[3068]; // DMP固件数组(实际需包含固件数据)
uint16_t i;
uint8_t progBuffer[16];
uint8_t bank = 0;
// 复位DMP
mpu_write_reg(dev, 0x6A, BIT_DMP_RST);
k_msleep(50);
// 禁用FIFO
mpu_write_reg(dev, 0x6A, 0x00);
// 加载固件
for (i = 0; i < sizeof(firmware); i += 16) {
// 写入16字节块
memcpy(progBuffer, &firmware[i], 16);
mpu_write_mem(dev, i, 16, progBuffer);
// 验证写入
uint8_t verify[16];
mpu_read_mem(dev, i, 16, verify);
if (memcmp(progBuffer, verify, 16) != 0) {
printk("固件验证失败 @ 0x%04X\n", i);
return -EIO;
}
}
// 设置DMP配置
uint8_t dmp_config[] = {0x03, 0x00, 0x00, 0x00, 0x00};
mpu_write_mem(dev, DMP_CFG_1, sizeof(dmp_config), dmp_config);
// 启用DMP
mpu_write_reg(dev, 0x6A, BIT_DMP_EN);
return 0;
}2.2 配置 DMP 输出
// 配置DMP输出四元数
void config_dmp_output(const struct device *dev)
{
// 设置采样率 (200Hz)
uint8_t rate = 1000000 / 200 / 4 - 1; // 4kHz内部速率
mpu_write_reg(dev, 0x19, rate);
// 设置FIFO速率分频器
mpu_write_reg(dev, 0x1A, 0x00);
// 配置DMP输出四元数
mpu_write_reg(dev, 0x70, 0x03); // 启用四元数
mpu_write_reg(dev, 0x1D, 0x01); // 设置DMP输出速率
// 启用FIFO
mpu_write_reg(dev, 0x6A, BIT_DMP_EN | BIT_FIFO_EN);
mpu_write_reg(dev, 0x23, BIT_FIFO_TEMP | BIT_DMP_OUT);
}2.3 读取 DMP 数据
// 读取四元数数据
int read_dmp_quaternion(const struct device *dev, float *quat)
{
uint8_t fifo_count[2];
uint8_t fifo_buffer[16];
// 读取FIFO计数
mpu_read_reg(dev, 0x72, fifo_count, 2);
uint16_t count = (fifo_count[0] << 8) | fifo_count[1];
if (count < 16) return -ENODATA;
// 读取FIFO数据
mpu_read_reg(dev, 0x74, fifo_buffer, 16);
// 解析四元数 (Q30格式)
int32_t q[4];
q[0] = (fifo_buffer[0] << 24) | (fifo_buffer[1] << 16) | (fifo_buffer[2] << 8) | fifo_buffer[3];
q[1] = (fifo_buffer[4] << 24) | (fifo_buffer[5] << 16) | (fifo_buffer[6] << 8) | fifo_buffer[7];
q[2] = (fifo_buffer[8] << 24) | (fifo_buffer[9] << 16) | (fifo_buffer[10] << 8) | fifo_buffer[11];
q[3] = (fifo_buffer[12] << 24) | (fifo_buffer[13] << 16) | (fifo_buffer[14] << 8) | fifo_buffer[15];
// 转换为浮点数 (除以2^30)
const float scale = 1.0f / (1 << 30);
quat[0] = q[0] * scale;
quat[1] = q[1] * scale;
quat[2] = q[2] * scale;
quat[3] = q[3] * scale;
return 0;
}2.4 四元数转欧拉角
// 四元数转欧拉角 (弧度)
void quaternion_to_euler(float *q, float *roll, float *pitch, float *yaw)
{
// 四元数分量
float w = q[0], x = q[1], y = q[2], z = q[3];
// 滚转角 (X轴)
*roll = atan2(2*(w*x + y*z), 1 - 2*(x*x + y*y));
// 俯仰角 (Y轴)
float sinp = 2*(w*y - z*x);
if (fabs(sinp) >= 1)
*pitch = copysign(M_PI/2, sinp);
else
*pitch = asin(sinp);
// 偏航角 (Z轴)
*yaw = atan2(2*(w*z + x*y), 1 - 2*(y*y + z*z));
}
// 弧度转角度
void rad_to_deg(float *roll, float *pitch, float *yaw)
{
*roll *= 180.0f / M_PI;
*pitch *= 180.0f / M_PI;
*yaw *= 180.0f / M_PI;
}3 DMP 高级应用
3.1 计步器实现
// 启用计步器功能
void enable_pedometer(const struct device *dev)
{
// 加载计步器固件段
uint8_t pedo_config[] = {0x3B, 0x00, 0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
mpu_write_mem(dev, D_0_22, sizeof(pedo_config), pedo_config);
// 设置计步器参数
uint8_t pedo_params[] = {0x0A, 0x14, 0x1E, 0x28}; // 阈值参数
mpu_write_mem(dev, D_PEDSTD_BP_B, sizeof(pedo_params), pedo_params);
// 启用计步器
mpu_write_reg(dev, 0x6A, BIT_DMP_EN | BIT_PEDO_EN);
}
// 读取步数
uint16_t read_step_count(const struct device *dev)
{
uint8_t step_count[2];
mpu_read_reg(dev, 0x78, step_count, 2);
return (step_count[0] << 8) | step_count[1];
}3.2 屏幕方向检测
// 配置屏幕方向检测
void config_screen_orientation(const struct device *dev)
{
// 设置屏幕方向阈值
uint8_t orient_params[] = {0x3C, 0x00, 0x00, 0x00};
mpu_write_mem(dev, D_0_1C, sizeof(orient_params), orient_params);
// 启用屏幕方向检测
mpu_write_reg(dev, 0x6A, BIT_DMP_EN | BIT_ORIENT_EN);
}
// 获取当前方向
enum ScreenOrientation {
PORTRAIT,
LANDSCAPE,
REVERSE_PORTRAIT,
REVERSE_LANDSCAPE
};
enum ScreenOrientation get_screen_orientation(const struct device *dev)
{
uint8_t orient;
mpu_read_reg(dev, 0x7E, &orient, 1);
switch (orient & 0x03) {
case 0: return PORTRAIT;
case 1: return LANDSCAPE;
case 2: return REVERSE_PORTRAIT;
case 3: return REVERSE_LANDSCAPE;
default: return PORTRAIT;
}
}3.3 运动唤醒功能
// 配置运动唤醒
void config_motion_wakeup(const struct device *dev, uint8_t threshold, uint8_t duration)
{
// 设置运动检测阈值
mpu_write_reg(dev, 0x1F, threshold);
// 设置运动检测持续时间
mpu_write_reg(dev, 0x20, duration);
// 配置中断
mpu_write_reg(dev, 0x37, 0x80); // 启用INT引脚
mpu_write_reg(dev, 0x38, 0x40); // 启用运动检测中断
// 启用低功耗运动唤醒
mpu_write_reg(dev, 0x6C, 0xC0); // 周期唤醒模式
mpu_write_reg(dev, 0x6B, 0x20); // 低功耗加速度模式
}4 DMP 性能优化技巧
4.1 校准程序
void calibrate_dmp(const struct device *dev)
{
// 进入校准模式
mpu_write_reg(dev, 0x6A, BIT_DMP_EN | BIT_CALIB_EN);
k_msleep(5000); // 保持设备静止5秒
// 保存校准数据
uint8_t calib_data[12];
mpu_read_mem(dev, D_ACCEL_BIAS, 12, calib_data);
// 写入永久存储 (Flash/EEPROM)
save_calibration_data(calib_data);
// 恢复DMP操作
mpu_write_reg(dev, 0x6A, BIT_DMP_EN);
}
// 启动时加载校准数据
void load_calibration(const struct device *dev)
{
uint8_t calib_data[12];
read_calibration_data(calib_data); // 从存储读取
mpu_write_mem(dev, D_ACCEL_BIAS, 12, calib_data);
}4.2 低功耗配置
void config_dmp_low_power(const struct device *dev)
{
// 降低采样率 (20Hz)
uint8_t rate = 1000000 / 20 / 4 - 1;
mpu_write_reg(dev, 0x19, rate);
// 禁用未使用功能
mpu_write_reg(dev, 0x70, 0x01); // 仅启用四元数
// 配置低功耗模式
mpu_write_reg(dev, 0x6C, 0xC0); // 周期唤醒模式
mpu_write_reg(dev, 0x6B, 0x28); // 低功耗加速度+陀螺仪
}4.3 数据滤波优化
// 应用卡尔曼滤波到DMP输出
struct KalmanFilter {
float Q_angle; // 过程噪声协方差
float Q_bias; // 过程噪声协方差
float R_measure; // 测量噪声协方差
float angle; // 计算的角度
float bias; // 计算的偏移
float P[2][2]; // 误差协方差矩阵
};
float kalman_update(struct KalmanFilter *kf, float new_angle, float new_rate, float dt)
{
// 预测步骤
kf->angle += dt * (new_rate - kf->bias);
kf->P[0][0] += dt * (dt * kf->P[1][1] - kf->P[0][1] - kf->P[1][0] + kf->Q_angle);
kf->P[0][1] -= dt * kf->P[1][1];
kf->P[1][0] -= dt * kf->P[1][1];
kf->P[1][1] += kf->Q_bias * dt;
// 更新步骤
float S = kf->P[0][0] + kf->R_measure;
float K[2] = {kf->P[0][0] / S, kf->P[1][0] / S};
float y = new_angle - kf->angle;
kf->angle += K[0] * y;
kf->bias += K[1] * y;
// 更新协方差矩阵
float P00_temp = kf->P[0][0];
float P01_temp = kf->P[0][1];
kf->P[0][0] -= K[0] * P00_temp;
kf->P[0][1] -= K[0] * P01_temp;
kf->P[1][0] -= K[1] * P00_temp;
kf->P[1][1] -= K[1] * P01_temp;
return kf->angle;
}5 DMP 应用案例
5.1 无人机姿态稳定系统
// PID控制器实现
struct PIDController {
float Kp, Ki, Kd;
float integral;
float prev_error;
};
float pid_update(struct PIDController *pid, float setpoint, float input, float dt)
{
float error = setpoint - input;
// 比例项
float P = pid->Kp * error;
// 积分项
pid->integral += error * dt;
float I = pid->Ki * pid->integral;
// 微分项
float derivative = (error - pid->prev_error) / dt;
float D = pid->Kd * derivative;
pid->prev_error = error;
return P + I + D;
}
// 主控制循环
void flight_control_loop(const struct device *dev)
{
struct PIDController roll_pid = {2.5, 0.05, 0.8, 0, 0};
struct PIDController pitch_pid = {2.5, 0.05, 0.8, 0, 0};
struct PIDController yaw_pid = {1.8, 0.01, 0.5, 0, 0};
while (1) {
float quat[4];
if (read_dmp_quaternion(dev, quat) == 0) {
float roll, pitch, yaw;
quaternion_to_euler(quat, &roll, &pitch, &yaw);
rad_to_deg(&roll, &pitch, &yaw);
// 获取目标姿态 (来自遥控器)
float target_roll = get_target_roll();
float target_pitch = get_target_pitch();
float target_yaw = get_target_yaw();
// 计算PID输出
float dt = 0.005; // 200Hz
float roll_correction = pid_update(&roll_pid, target_roll, roll, dt);
float pitch_correction = pid_update(&pitch_pid, target_pitch, pitch, dt);
float yaw_correction = pid_update(&yaw_pid, target_yaw, yaw, dt);
// 调整电机转速
adjust_motors(roll_correction, pitch_correction, yaw_correction);
}
k_msleep(5);
}
}5.2 VR 控制器手势识别
// 手势检测状态机
enum Gesture {
GESTURE_NONE,
GESTURE_SWIPE_LEFT,
GESTURE_SWIPE_RIGHT,
GESTURE_TAP,
GESTURE_DOUBLE_TAP
};
void detect_gestures(const struct device *dev)
{
static uint32_t last_tap_time = 0;
static enum Gesture current_gesture = GESTURE_NONE;
uint8_t motion_status;
mpu_read_reg(dev, 0x7E, &motion_status, 1);
// 检测点击
if (motion_status & BIT_TAP_DETECTED) {
uint32_t now = k_uptime_get();
if (now - last_tap_time < 300) { // 300ms内
current_gesture = GESTURE_DOUBLE_TAP;
} else {
current_gesture = GESTURE_TAP;
}
last_tap_time = now;
}
// 检测滑动
else if (motion_status & BIT_SWIPE_DETECTED) {
uint8_t swipe_dir;
mpu_read_reg(dev, 0x7F, &swipe_dir, 1);
if (swipe_dir & BIT_SWIPE_POS_X) {
current_gesture = GESTURE_SWIPE_RIGHT;
} else if (swipe_dir & BIT_SWIPE_NEG_X) {
current_gesture = GESTURE_SWIPE_LEFT;
}
}
// 处理检测到的手势
if (current_gesture != GESTURE_NONE) {
handle_gesture(current_gesture);
current_gesture = GESTURE_NONE;
}
}6 DMP 开发注意事项
6.1 处理事项解决方法
1) 中断处理优化
// 高效中断处理
void mpu_isr(const struct device *gpio, struct gpio_callback *cb, uint32_t pins)
{
uint8_t int_status;
mpu_read_reg(mpu_dev, 0x3A, &int_status, 1);
if (int_status & BIT_DMP_INT) {
k_work_submit(&dmp_work); // 提交工作队列任务
}
}2) FIFO 溢出处理
void handle_fifo_overflow(const struct device *dev)
{
// 重置FIFO
mpu_write_reg(dev, 0x6A, BIT_FIFO_RST);
k_msleep(10);
mpu_write_reg(dev, 0x6A, BIT_DMP_EN | BIT_FIFO_EN);
// 增加读取频率
set_dmp_read_rate(100); // 100Hz
}3) 实时性能监控
void monitor_dmp_performance()
{
static uint32_t last_count = 0;
static uint32_t last_time = 0;
uint32_t current_time = k_uptime_get();
uint16_t step_count = read_step_count(mpu_dev);
if (current_time - last_time > 1000) {
float steps_per_sec = (step_count - last_count) / ((current_time - last_time) / 1000.0f);
printk("DMP处理速率: %.1f steps/s\n", steps_per_sec);
last_count = step_count;
last_time = current_time;
}
}6.2 DMP 常见问题解决
| 问题 | 可能原因 | 解决方案 |
|---|---|---|
| DMP无法加载 | 固件不匹配 | 验证传感器版本和固件兼容性 |
| 姿态漂移 | 未校准 | 执行完整校准程序 |
| 无数据输出 | FIFO配置错误 | 检查FIFO使能和速率设置 |
| 欧拉角翻转 | 四元数方向错误 | 调整传感器安装方向 |
| 响应延迟 | 采样率过低 | 提高DMP输出速率 |
| 功耗过高 | 未使用低功耗模式 | 启用周期唤醒和低功耗配置 |
| 中断丢失 | 中断处理过慢 | 简化中断处理程序 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









