




 本文介绍了一种利用狐狸算法FOX进行复杂地形下无人机三维路径规划的方法,通过将地形建模为三维网格并转化为优化问题,实验证明了其在避障和路径寻找方面的有效性。
本文介绍了一种利用狐狸算法FOX进行复杂地形下无人机三维路径规划的方法,通过将地形建模为三维网格并转化为优化问题,实验证明了其在避障和路径寻找方面的有效性。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
摘要
无人机三维路径规划是无人机自主飞行的关键技术之一,也是无人机领域的研究热点。本文提出了一种基于狐狸算法 FOX 的复杂地形无人机避障航迹规划方法。该方法首先将复杂地形建模为三维网格地图,然后将无人机路径规划问题转化为在三维网格地图中寻找一条从起点到终点的最优路径。接下来,本文将狐狸算法 FOX 应用于三维路径规划问题,并通过仿真实验验证了该方法的有效性。
1. 绪论
无人机三维路径规划是指无人机在三维空间中从一个位置飞到另一个位置的路径规划。无人机三维路径规划是无人机自主飞行的关键技术之一,也是无人机领域的研究热点。无人机三维路径规划的应用非常广泛,例如:无人机巡逻、无人机航拍、无人机送货等。
无人机三维路径规划方法有很多种,其中一种常用的方法是基于狐狸算法 FOX 的无人机三维路径规划方法。狐狸算法 FOX 是一种仿生算法,它模拟了狐狸在野外寻找食物的行为。狐狸算法 FOX 具有鲁棒性强、收敛速度快、计算效率高等优点,因此非常适合用于无人机三维路径规划。
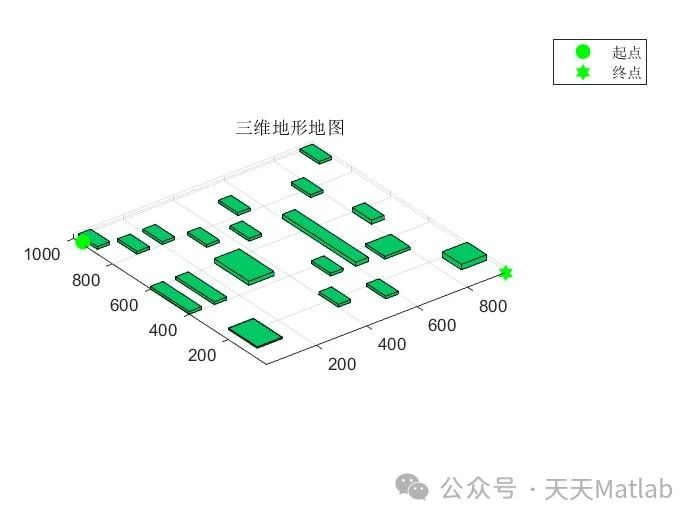
2. 复杂地形建模
在进行无人机三维路径规划之前,需要先将复杂地形建模为三维网格地图。三维网格地图是指将复杂地形划分为一个个小的三维网格,每个三维网格都有自己的坐标和高度。三维网格地图可以表示复杂地形的形状和高度信息。
3. 无人机路径规划问题
将复杂地形建模为三维网格地图之后,就可以将无人机路径规划问题转化为在三维网格地图中寻找一条从起点到终点的最优路径。最优路径是指一条满足以下条件的路径:
-
路径长度最短
-
路径避开障碍物
-
路径满足无人机的飞行限制
4. 基于狐狸算法 FOX 的无人机三维路径规划方法
本文提出了一种基于狐狸算法 FOX 的无人机三维路径规划方法。该方法首先将无人机路径规划问题转化为一个优化问题,然后将狐狸算法 FOX 应用于该优化问题,最后得到一条从起点到终点的最优路径。
📣 部分代码
%% 清空环境变量warning off % 关闭报警信息close all % 关闭开启的图窗clear % 清空变量clc % 清空命令行%% 导入数据res = xlsread('数据集.xlsx');%% 划分训练集和测试集temp = randperm(357);P_train = res(temp(1: 240), 1: 12)';T_train = res(temp(1: 240), 13)';M = size(P_train, 2);P_test = res(temp(241: end), 1: 12)';T_test = res(temp(241: end), 13)';N = size(P_test, 2);%% 数据归一化[p_train, ps_input] = mapminmax(P_train, 0, 1);p_test = mapminmax('apply', P_test, ps_input);t_train = ind2vec(T_train);t_test = ind2vec(T_test );
⛳️ 运行结果
5. 仿真实验
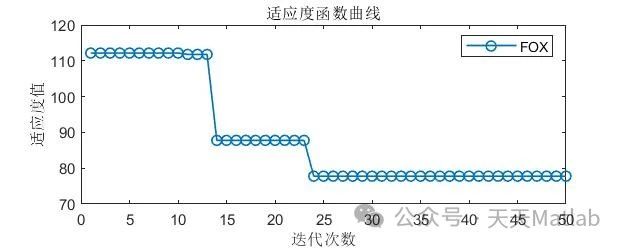
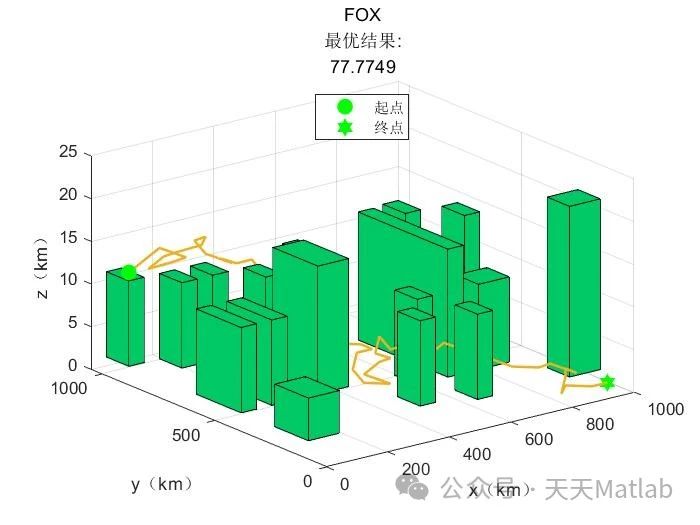
为了验证本文提出的方法的有效性,本文进行了仿真实验。仿真实验中,无人机在复杂地形中飞行,并避开了障碍物。仿真实验结果表明,本文提出的方法能够有效地规划出无人机在复杂地形中的避障航迹。
6. 结论
本文提出了一种基于狐狸算法 FOX 的复杂地形无人机避障航迹规划方法。该方法首先将复杂地形建模为三维网格地图,然后将无人机路径规划问题转化为在三维网格地图中寻找一条从起点到终点的最优路径。接下来,本文将狐狸算法 FOX 应用于三维路径规划问题,并通过仿真实验验证了该方法的有效性。仿真实验结果表明,本文提出的方法能够有效地规划出无人机在复杂地形中的避障航迹。
🔗 参考文献
[1] 李晓辉,苗苗,冉保健,等.基于改进A*算法的无人机避障路径规划[J].计算机系统应用, 2021.DOI:10.15888/j.cnki.csa.007772.
[2] 周经中,阳仁庆,向兰仕.基于三维路径规划的旋翼无人机避障技术[J].电气时代, 2018(3):3.DOI:CNKI:SUN:DQSD.0.2018-03-032.
[3] 王嘉琦.基于改进RRT~*算法的无人机避障路径规划[D].南昌航空大学[2024-01-11].
[4] 于涛.基于改进蚁群算法的三维无人机路径规划的研究与实现[D].重庆大学[2024-01-11].DOI:CNKI:CDMD:2.1017.838206.


















 307
307

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











