




 本文介绍了TikiTakaAlgorithm,一种基于足球战术的智能优化算法,应用于攻防优化问题,通过信息传递和决策灵活性提高效率。该算法在多种领域具有优势,包括高效性、鲁棒性和可扩展性,预示着在人工智能攻防优化中的广阔前景。
本文介绍了TikiTakaAlgorithm,一种基于足球战术的智能优化算法,应用于攻防优化问题,通过信息传递和决策灵活性提高效率。该算法在多种领域具有优势,包括高效性、鲁棒性和可扩展性,预示着在人工智能攻防优化中的广阔前景。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
智能优化算法一直是人工智能领域的热门话题之一。随着技术的不断发展,优化算法在各个领域都有着广泛的应用,尤其在攻防优化领域更是备受关注。今天,我们将介绍一种极致攻防优化算法——Tiki Taka Algorithm。
Tiki Taka Algorithm是一种基于智能优化的攻防优化算法,其灵感来源于足球运动中的“西班牙式打法”——Tiki Taka。Tiki Taka在足球比赛中以其快速的短传和灵活的跑动而闻名,是一种高效的进攻方式。Tiki Taka Algorithm正是借鉴了这种高效的进攻方式,将其应用到了攻防优化算法中,以期达到更加高效的优化效果。
Tiki Taka Algorithm的核心思想是通过快速的信息传递和灵活的决策来实现攻防的优化。在攻防优化问题中,信息的传递和决策的灵活性是非常重要的因素。Tiki Taka Algorithm通过对信息传递和决策过程的优化,使得攻防双方能够更加高效地进行博弈,从而达到更好的优化效果。
与传统的优化算法相比,Tiki Taka Algorithm具有以下几个显著的优势:
-
高效性:Tiki Taka Algorithm通过快速的信息传递和灵活的决策,能够在较短的时间内找到较优的解决方案,从而提高了优化的效率。
-
鲁棒性:Tiki Taka Algorithm在面对不同的攻防情况时能够灵活应对,具有较强的鲁棒性,能够适应不同的环境和条件。
-
可扩展性:Tiki Taka Algorithm能够很好地适应不同规模和复杂度的攻防优化问题,具有较强的可扩展性。
总的来说,Tiki Taka Algorithm作为一种极致攻防优化算法,具有较高的实用价值和广阔的应用前景。在未来的人工智能领域,Tiki Taka Algorithm有望成为攻防优化领域的重要技术之一,为各种攻防优化问题的解决提供更加高效和可靠的解决方案。相信随着技术的不断发展,Tiki Taka Algorithm将会在攻防优化领域发挥出越来越重要的作用。
📣 部分代码
function [lowerbound,upperbound,dimension,fitness] = fun_info(F)switch Fcase 'F1'fitness = @F1;lowerbound=-100;upperbound=100;dimension=30;case 'F2'fitness = @F2;lowerbound=-10;upperbound=10;dimension=30;case 'F3'fitness = @F3;lowerbound=-100;upperbound=100;dimension=30;case 'F4'fitness = @F4;lowerbound=-100;upperbound=100;dimension=30;case 'F5'fitness = @F5;lowerbound=-30;upperbound=30;dimension=30;case 'F6'fitness = @F6;lowerbound=-100;upperbound=100;dimension=30;case 'F7'fitness = @F7;lowerbound=-1.28;upperbound=1.28;dimension=30;case 'F8'fitness = @F8;lowerbound=-500;upperbound=500;dimension=30;case 'F9'fitness = @F9;lowerbound=-5.12;upperbound=5.12;dimension=30;case 'F10'fitness = @F10;lowerbound=-32;upperbound=32;dimension=30;case 'F11'fitness = @F11;lowerbound=-600;upperbound=600;dimension=30;case 'F12'fitness = @F12;lowerbound=-50;upperbound=50;dimension=30;case 'F13'fitness = @F13;lowerbound=-50;upperbound=50;dimension=30;case 'F14'fitness = @F14;lowerbound=-65.536;upperbound=65.536;dimension=2;case 'F15'fitness = @F15;lowerbound=-5;upperbound=5;dimension=4;case 'F16'fitness = @F16;lowerbound=-5;upperbound=5;dimension=2;case 'F17'fitness = @F17;lowerbound=[-5,0];upperbound=[10,15];dimension=2;case 'F18'fitness = @F18;lowerbound=-2;upperbound=2;dimension=2;case 'F19'fitness = @F19;lowerbound=0;upperbound=1;dimension=3;case 'F20'fitness = @F20;lowerbound=0;upperbound=1;dimension=6;case 'F21'fitness = @F21;lowerbound=0;upperbound=10;dimension=4;case 'F22'fitness = @F22;lowerbound=0;upperbound=10;dimension=4;case 'F23'fitness = @F23;lowerbound=0;upperbound=10;dimension=4;endend% F1function R = F1(x)R=sum(x.^2);end% F2function R = F2(x)R=sum(abs(x))+prod(abs(x));end% F3function R = F3(x)dimension=size(x,2);R=0;for i=1:dimensionR=R+sum(x(1:i))^2;endend% F4function R = F4(x)R=max(abs(x));end% F5function R = F5(x)dimension=size(x,2);R=sum(100*(x(2:dimension)-(x(1:dimension-1).^2)).^2+(x(1:dimension-1)-1).^2);end% F6function R = F6(x)R=sum(abs((x+.5)).^2);end% F7function R = F7(x)dimension=size(x,2);R=sum([1:dimension].*(x.^4))+rand;end% F8function R = F8(x)R=sum(-x.*sin(sqrt(abs(x))));end% F9function R = F9(x)dimension=size(x,2);R=sum(x.^2-10*cos(2*pi.*x))+10*dimension;end% F10function R = F10(x)dimension=size(x,2);R=-20*exp(-.2*sqrt(sum(x.^2)/dimension))-exp(sum(cos(2*pi.*x))/dimension)+20+exp(1);end% F11function R = F11(x)dimension=size(x,2);R=sum(x.^2)/4000-prod(cos(x./sqrt([1:dimension])))+1;end% F12function R = F12(x)dimension=size(x,2);R=(pi/dimension)*(10*((sin(pi*(1+(x(1)+1)/4)))^2)+sum((((x(1:dimension-1)+1)./4).^2).*...(1+10.*((sin(pi.*(1+(x(2:dimension)+1)./4)))).^2))+((x(dimension)+1)/4)^2)+sum(Ufun(x,10,100,4));end% F13function R = F13(x)dimension=size(x,2);R=.1*((sin(3*pi*x(1)))^2+sum((x(1:dimension-1)-1).^2.*(1+(sin(3.*pi.*x(2:dimension))).^2))+...((x(dimension)-1)^2)*(1+(sin(2*pi*x(dimension)))^2))+sum(Ufun(x,5,100,4));end% F14function R = F14(x)aS=[-32 -16 0 16 32 -32 -16 0 16 32 -32 -16 0 16 32 -32 -16 0 16 32 -32 -16 0 16 32;,...-32 -32 -32 -32 -32 -16 -16 -16 -16 -16 0 0 0 0 0 16 16 16 16 16 32 32 32 32 32];for j=1:25bS(j)=sum((x'-aS(:,j)).^6);endR=(1/500+sum(1./([1:25]+bS))).^(-1);end% F15function R = F15(x)aK=[.1957 .1947 .1735 .16 .0844 .0627 .0456 .0342 .0323 .0235 .0246];bK=[.25 .5 1 2 4 6 8 10 12 14 16];bK=1./bK;R=sum((aK-((x(1).*(bK.^2+x(2).*bK))./(bK.^2+x(3).*bK+x(4)))).^2);end% F16function R = F16(x)R=4*(x(1)^2)-2.1*(x(1)^4)+(x(1)^6)/3+x(1)*x(2)-4*(x(2)^2)+4*(x(2)^4);end% F17function R = F17(x)R=(x(2)-(x(1)^2)*5.1/(4*(pi^2))+5/pi*x(1)-6)^2+10*(1-1/(8*pi))*cos(x(1))+10;end% F18function R = F18(x)R=(1+(x(1)+x(2)+1)^2*(19-14*x(1)+3*(x(1)^2)-14*x(2)+6*x(1)*x(2)+3*x(2)^2))*...(30+(2*x(1)-3*x(2))^2*(18-32*x(1)+12*(x(1)^2)+48*x(2)-36*x(1)*x(2)+27*(x(2)^2)));end% F19function R = F19(x)aH=[3 10 30;.1 10 35;3 10 30;.1 10 35];cH=[1 1.2 3 3.2];pH=[.3689 .117 .2673;.4699 .4387 .747;.1091 .8732 .5547;.03815 .5743 .8828];R=0;for i=1:4R=R-cH(i)*exp(-(sum(aH(i,:).*((x-pH(i,:)).^2))));endend% F20function R = F20(x)aH=[10 3 17 3.5 1.7 8;.05 10 17 .1 8 14;3 3.5 1.7 10 17 8;17 8 .05 10 .1 14];cH=[1 1.2 3 3.2];pH=[.1312 .1696 .5569 .0124 .8283 .5886;.2329 .4135 .8307 .3736 .1004 .9991;....2348 .1415 .3522 .2883 .3047 .6650;.4047 .8828 .8732 .5743 .1091 .0381];R=0;for i=1:4R=R-cH(i)*exp(-(sum(aH(i,:).*((x-pH(i,:)).^2))));endend% F21function R = F21(x)aSH=[4 4 4 4;1 1 1 1;8 8 8 8;6 6 6 6;3 7 3 7;2 9 2 9;5 5 3 3;8 1 8 1;6 2 6 2;7 3.6 7 3.6];cSH=[.1 .2 .2 .4 .4 .6 .3 .7 .5 .5];R=0;for i=1:5R=R-((x-aSH(i,:))*(x-aSH(i,:))'+cSH(i))^(-1);endend% F22function R = F22(x)aSH=[4 4 4 4;1 1 1 1;8 8 8 8;6 6 6 6;3 7 3 7;2 9 2 9;5 5 3 3;8 1 8 1;6 2 6 2;7 3.6 7 3.6];cSH=[.1 .2 .2 .4 .4 .6 .3 .7 .5 .5];R=0;for i=1:7R=R-((x-aSH(i,:))*(x-aSH(i,:))'+cSH(i))^(-1);endend% F23function R = F23(x)aSH=[4 4 4 4;1 1 1 1;8 8 8 8;6 6 6 6;3 7 3 7;2 9 2 9;5 5 3 3;8 1 8 1;6 2 6 2;7 3.6 7 3.6];cSH=[.1 .2 .2 .4 .4 .6 .3 .7 .5 .5];R=0;for i=1:10R=R-((x-aSH(i,:))*(x-aSH(i,:))'+cSH(i))^(-1);endendfunction R=Ufun(x,a,k,m)R=k.*((x-a).^m).*(x>a)+k.*((-x-a).^m).*(x<(-a));end
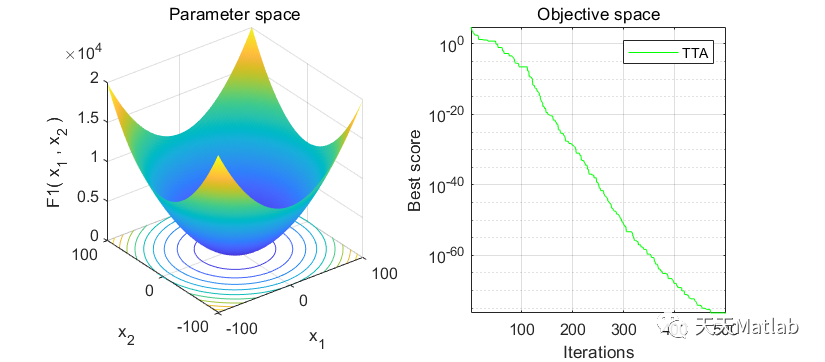
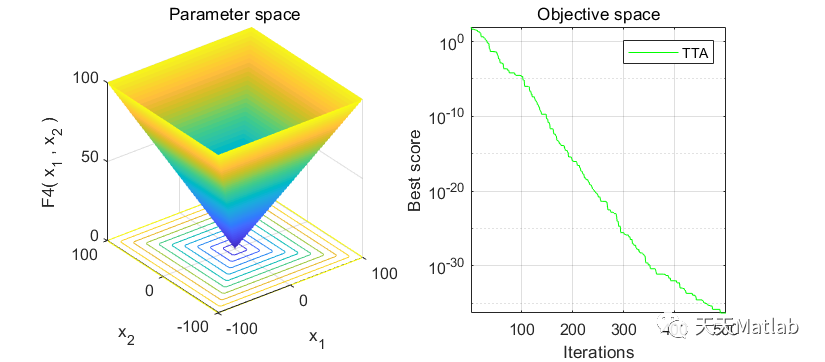
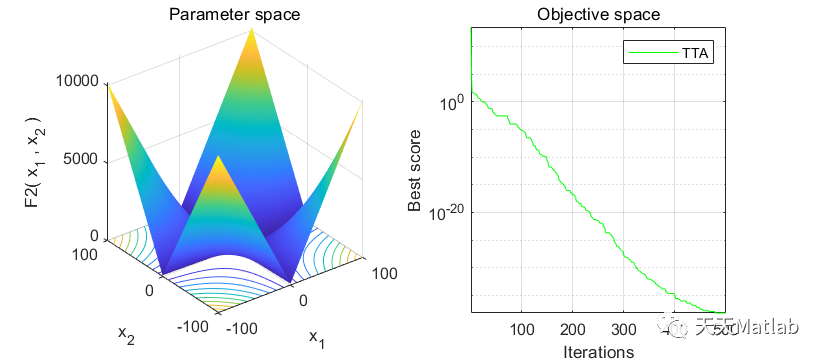
⛳️ 运行结果
🔗 参考文献
Rashid, Mohd Fadzil Faisae Ab. “Tiki-Taka Algorithm: a Novel Metaheuristic Inspired by Football Playing Style.” Engineering Computations, vol. 38, no. 1, Emerald, June 2020, pp. 313–43, doi:10.1108/ec-03-2020-0137.


















 353
353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











