




 该研究通过Matlab平台开发了一款交互式GUI软件,旨在简化体育科研人员对表面肌电(sEMG)信号的处理流程。软件涵盖了sEMG信号处理的基本功能,并通过与商用软件对比验证了其准确性。代码示例展示了肌纤维动作电位的计算,考虑了肌纤维长度差异的影响。
该研究通过Matlab平台开发了一款交互式GUI软件,旨在简化体育科研人员对表面肌电(sEMG)信号的处理流程。软件涵盖了sEMG信号处理的基本功能,并通过与商用软件对比验证了其准确性。代码示例展示了肌纤维动作电位的计算,考虑了肌纤维长度差异的影响。
1 简介
研究目的通过使用Matlab平台,实现运动生物力学研究中常用的表面肌电(s EMG)信号处理方法,为不会使用编程进行表面肌电(s EMG)信号数据处理的体育科研人员在表面肌电(s EMG)信号的处理过程中提供一个高效、简单的处理软件。研究方法通过对运动人体科学文献中常用的表面肌电信号(s EMG)处理方法进行总结,并获取进行表面肌电信号处理时常用的处理方法的算法,然后利用Matlab编程语言对各处理方法进行实现,并且实现为交互式的GUI软件。通过与现有商用软件处理结果的比较,对实现的各方法在数据处理过程中的准确性进行验证。然后将其应用到实验室的表面肌电(s EMG)信号数据处理当中,通过招募无编程基础的人员使用实验室的商业软件和本软件分别进行相同的数据处理过程,比较两者的效率。结果Matlab编写完成了一套涵盖表面肌电信号(s EMG)在体育科学研究中处理基本功能的软件。
2 部分代码
%liqiang 2006.4.2%reference:Modeling of surface myoelectric signals.I.Model implementation%tripole model of SFAP%点电极在终板区(end_plate)右边%function sfap=SFAP_tri(dist_x,dist_y,dist_z,kab,vel)的改进:终板区左右肌纤维长度是不同的function sfap=SFAP_tri_jm(dist_x,dist_y,dist_z,kab,vel,len_fiber,fiberL,fiberR,SampleRate)%function sfap=SFAP_tri_improve(0,5,10,0.303,4,100,-20,0)%input:% dist_x,dist_y,dist_z 为点电极的坐标(严格按照参考文献的坐标)% kab: kab=a/b,且0=<kab<1, b=7(default)% vel: 肌纤维的传导速度(与肌纤维直径有关)% len_fiber:肌纤维的半长(基长len_fiber=100mm)% fiberL:肌纤维左边长度变化,(基长为100mm)% fiberR:肌纤维右边长度变化,(基长为100mm)%output:% sfap:单纤维动作电位pre=1/(SampleRate/1000);%pre=0.5; %precision产生电位的分辨率,越小分辨率越高,但数据越长%单独研究动作电位时,应该设置高分辨率pre=0.01;%研究肌电信号时,应该设置低分辨率pre=1(采样率为1kHz),以满足计算;%pre=0.5时,对应的采样率为2kHz%clear%kab=0.303; %输入比值 kab=a/b%vel=4; %输入参数%dist_x=0;dist_y=5;dist_z=10;delta_r=0.063;delta_z=0.33;delta=delta_z/delta_r;%len_fiber=100;%肌纤维半长len_fiberL=len_fiber+fiberL;len_fiberR=len_fiber+fiberR;b=7; %spacinga=kab*b;I2=388;I3=kab*I2;I1=I2-I3;%step1%1 电极子的产生过程%%generation%I1传输t=0:pre:a/vel-pre;ra1=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*t).^2);%向右ra2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z).^2);ra3=ra2;rb1=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*t).^2);%向左rb2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z).^2);rb3=rb2;sfap=(-I1./ra1+I2./ra2-I3./ra3-I3./rb3+I2./rb2-I1./rb1)/(2*pi*delta_r);%I2传输t=a/vel:pre:b/vel-pre;ra1=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*t).^2);ra2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*t+a).^2);ra3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z).^2); %向右rb1=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*t).^2);rb2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*t-a).^2);rb3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z).^2); %向左temp=(-I1./ra1+I2./ra2-I3./ra3-I3./rb3+I2./rb2-I1./rb1)./(2*pi*delta_r);sfap=[sfap,[temp]];clear tempclear ra1 ra2 ra3 rb1 rb2 rb3%step2%2 整个电极子的传输过程%由于肌纤维左右长度的不同,下面分别考虑左右电极子的传输过程%右边极子的传输和消失过程%开始产生I3%%transmissiontR=b/vel:pre:len_fiberR/vel-pre;r1=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*tR).^2);r2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*tR+a).^2);r3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*tR+b).^2);%右边电极子的消失过程,%%extinction%I1在肌键(肌纤维末端)处恒定,I2和I3向肌键移动tR1=len_fiberR/vel:pre:(len_fiberR+a)/vel-pre;ra1=zeros(1,length(tR1));ra1(1:end)=sqrt((dist_x^2+dist_y^2)*delta+(len_fiberR-dist_z).^2);ra2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*tR1+a).^2);ra3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*tR1+b).^2); %向右%I1和I2在肌键(肌纤维末端)处恒定,I3向肌键移动%tR2=(len_fiberR+a)/vel:pre:(len_fiberR+b-a)/vel;tR2=(len_fiberR+a)/vel:pre:(len_fiberR+b)/vel;raa1=zeros(1,length(tR2));raa1(1:end)=sqrt((dist_x^2+dist_y^2)*delta+(len_fiberR-dist_z).^2);raa2=raa1;raa3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z-vel.*tR2+b).^2);%向右%对右边极子的组合Re1=[r1 ra1 raa1]; %I1Re2=[r2 ra2 raa2]; %I2Re3=[r3 ra3 raa3]; %I3%左边极子的传输和消失过程%%transmissiontL=b/vel:pre:len_fiberL/vel-pre;r4=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*tL-b).^2);r5=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*tL-a).^2);r6=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*tL).^2);%%extinction%I1在肌键(肌纤维末端)处恒定,I2和I3向肌键移动tL1=len_fiberL/vel:pre:(len_fiberL+a)/vel-pre;rb1=zeros(1,length(tL1));rb1(1:end)=sqrt((dist_x^2+dist_y^2)*delta+(len_fiberL+dist_z).^2);rb2=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*tL1-a).^2);rb3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*tL1-b).^2); %向左%I1和I2在肌键(肌纤维末端)处恒定,I3向肌键移动%tL2=(len_fiberL+a)/vel:pre:(len_fiberL+b-a)/vel;tL2=(len_fiberL+a)/vel:pre:(len_fiberL+b)/vel;rbb1=zeros(1,length(tL2));rbb1(1:end)=sqrt((dist_x^2+dist_y^2)*delta+(len_fiberL+dist_z).^2);rbb2=rbb1;rbb3=sqrt((dist_x^2+dist_y^2)*delta+(dist_z+vel.*tL2-b).^2); %向左%对左边极子的组合Le1=[r6 rb1 rbb1]; %I1Le2=[r5 rb2 rbb2]; %I2Le3=[r4 rb3 rbb3]; %I3%step3%根据肌纤维左右长度的不同,计算产生的动作电位fiber_right=length(Re3);fiber_left=length(Le3);if fiber_right<=fiber_lefttemp=(-I1./Re1+I2./Re2-I3./Re3-I3./Le3(1:fiber_right)+I2./Le2(1:fiber_right)-I1./Le1(1:fiber_right))./(2*pi*delta_r);sfap=[sfap,[temp]];clear temptemp=(-I3./Le3(fiber_right+1:end)+I2./Le2(fiber_right+1:end)-I1./Le1(fiber_right+1:end))./(2*pi*delta_r);sfap=[sfap,[temp]];clear tempelsetemp=(-I1./Re1(1:fiber_left)+I2./Re2(1:fiber_left)-I3./Re3(1:fiber_left)-I3./Le3+I2./Le2-I1./Le1)./(2*pi*delta_r);sfap=[sfap,[temp]];clear temptemp=(-I1./Re1(fiber_left+1:end)+I2./Re2(fiber_left+1:end)-I3./Re3(fiber_left+1:end))./(2*pi*delta_r);sfap=[sfap,[temp]];clear tempendtemp=sfap;sfap=zeros(1,length(temp)+1);sfap(1:length(temp))=temp;
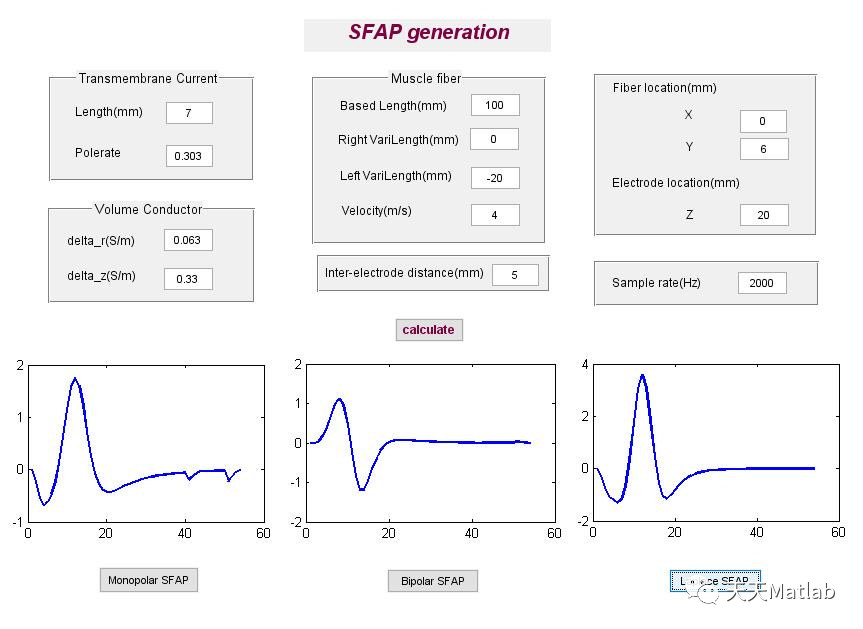
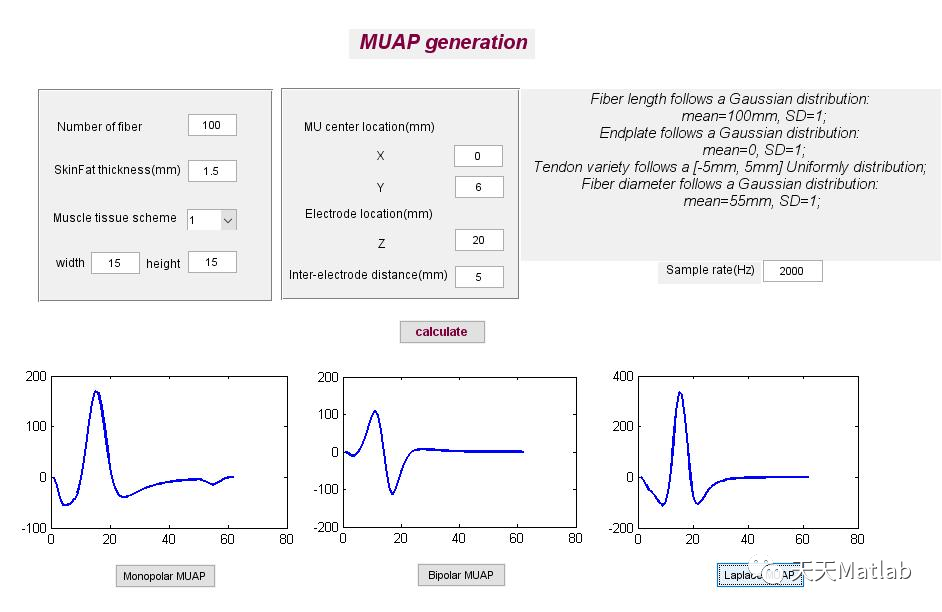
3 仿真结果
4 参考文献
[1]李向明. 基于Matlab的表面肌电信号处理软件设计与开发[D]. 上海体育学院.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


















 270
270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











