




 本文提出了一种基于SURF算法的图像配准方法,旨在解决SIFT算法运算速度慢的问题。通过使用SURF算法提取图像特征点,并采用64维特征向量作为描述子,选用欧氏距离进行匹配。
本文提出了一种基于SURF算法的图像配准方法,旨在解决SIFT算法运算速度慢的问题。通过使用SURF算法提取图像特征点,并采用64维特征向量作为描述子,选用欧氏距离进行匹配。
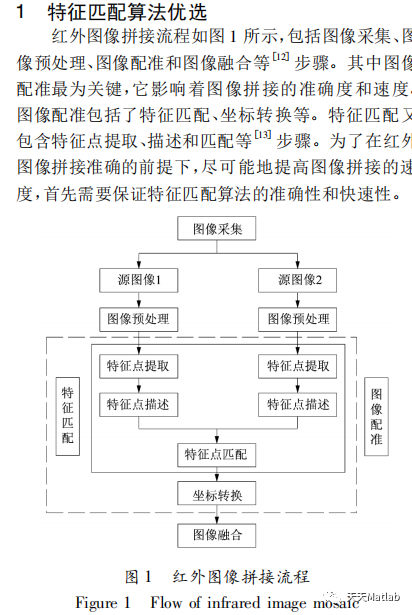
1 简介
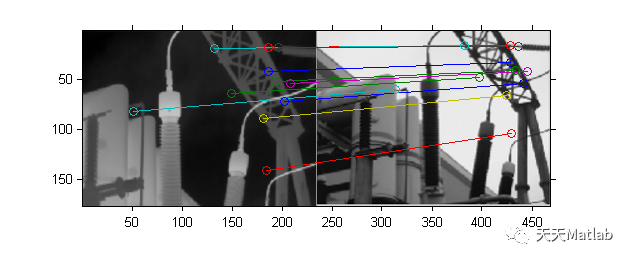
针对SIFT(Scale Invariant Feature Transform)算法运算速度慢,提出了基于SURF(Speeded Up Robust Features)算法的图像配准.对于可见光和可见光图像,先用SURF算法提取图像的特征点,并采用64维的特征向量作为特征描述子;选用欧氏距离作为匹配方法。
2 部分代码
function ipts=OpenSurf(img,Options)% This function OPENSURF, is an implementation of SURF (Speeded Up Robust% Features). SURF will detect landmark points in an image, and describe% the points by a vector which is robust against (a little bit) rotation% ,scaling and noise. It can be used in the same way as SIFT (Scale-invariant% feature transform) which is patented. Thus to align (register) two% or more images based on corresponding points, or make 3D reconstructions.%% This Matlab implementation of Surf is a direct translation of the% OpenSurf C# code of Chris Evans, and gives exactly the same answer.% Chris Evans wrote one of the best, well structured all inclusive SURF% implementations. On his site you can find Evaluations of OpenSURF% and the C# and C++ code. http://www.chrisevansdev.com/opensurf/% Chris Evans gave me permisson to publish this code under the (Mathworks)% BSD license.%% Ipts = OpenSurf(I, Options)%% inputs,% I : The 2D input image color or greyscale% (optional)% Options : A struct with options (see below)%% outputs,% Ipts : A structure with the information about all detected Landmark points% Ipts.x , ipts.y : The landmark position% Ipts.scale : The scale of the detected landmark% Ipts.laplacian : The laplacian of the landmark neighborhood% Ipts.orientation : Orientation in radians% Ipts.descriptor : The descriptor for corresponding point matching%% options,% Options.verbose : If set to true then useful information is% displayed (default false)% Options.upright : Boolean which determines if we want a non-rotation% invariant result (default false)% Options.extended : Add extra landmark point information to the% descriptor (default false)% Options.tresh : Hessian response treshold (default 0.0002)% Options.octaves : Number of octaves to analyse(default 5)% Options.init_sample : Initial sampling step in the image (default 2)%% Example 1, Basic Surf Point Detection% % Load image% I=imread('TestImages/test.png');% % Set this option to true if you want to see more information% Options.verbose=false;% % Get the Key Points% Ipts=OpenSurf(I,Options);% % Draw points on the image% PaintSURF(I, Ipts);%% Example 2, Corresponding points% % See, example2.m%% Example 3, Affine registration% % See, example3.m%% Function is written by D.Kroon University of Twente (July 2010)% Add subfunctions to Matlab Search pathfunctionname='OpenSurf.m';functiondir=which(functionname);functiondir=functiondir(1:end-length(functionname));addpath([functiondir '/SubFunctions'])% Process inputsdefaultoptions=struct('tresh',0.0002,'octaves',5,'init_sample',2,'upright',false,'extended',false,'verbose',false);if(~exist('Options','var')),Options=defaultoptions;elsetags = fieldnames(defaultoptions);for i=1:length(tags)if(~isfield(Options,tags{i})), Options.(tags{i})=defaultoptions.(tags{i}); endendif(length(tags)~=length(fieldnames(Options))),warning('register_volumes:unknownoption','unknown options found');endend% Create Integral Imageiimg=IntegralImage_IntegralImage(img);% Extract the interest pointsFastHessianData.thresh = Options.tresh;FastHessianData.octaves = Options.octaves;FastHessianData.init_sample = Options.init_sample;FastHessianData.img = iimg;ipts = FastHessian_getIpoints(FastHessianData,Options.verbose);% Describe the interest pointsif(~isempty(ipts))ipts = SurfDescriptor_DecribeInterestPoints(ipts,Options.upright, Options.extended, iimg, Options.verbose);end
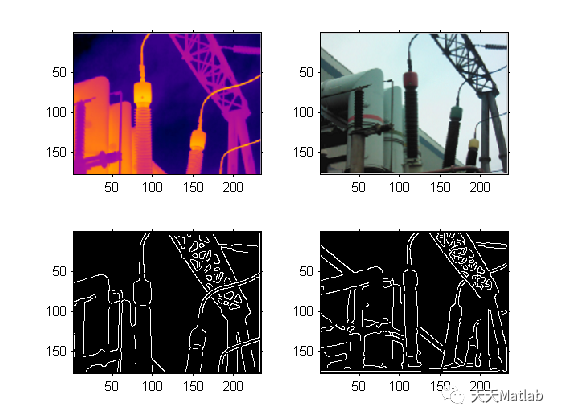
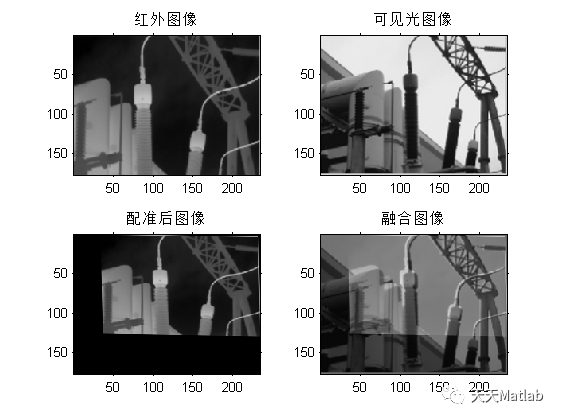
3 仿真结果
4 参考文献
[1]李冬梅. 基于SURF算法的红外与可见光图像配准[J]. 信息工程期刊, 2012(2).
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


















 238
238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











