




 该博客介绍了如何在ROS中创建自定义服务类型,通过一个简单的加法运算示例展示了客户端如何调用服务端提供的加法服务。客户端订阅方接收两个数作为参数,服务端接收到请求后进行求和并返回结果。通过`ros::service::waitForService`确保服务端已启动,然后使用`service_client::Sumsrv`进行服务调用。
该博客介绍了如何在ROS中创建自定义服务类型,通过一个简单的加法运算示例展示了客户端如何调用服务端提供的加法服务。客户端订阅方接收两个数作为参数,服务端接收到请求后进行求和并返回结果。通过`ros::service::waitForService`确保服务端已启动,然后使用`service_client::Sumsrv`进行服务调用。
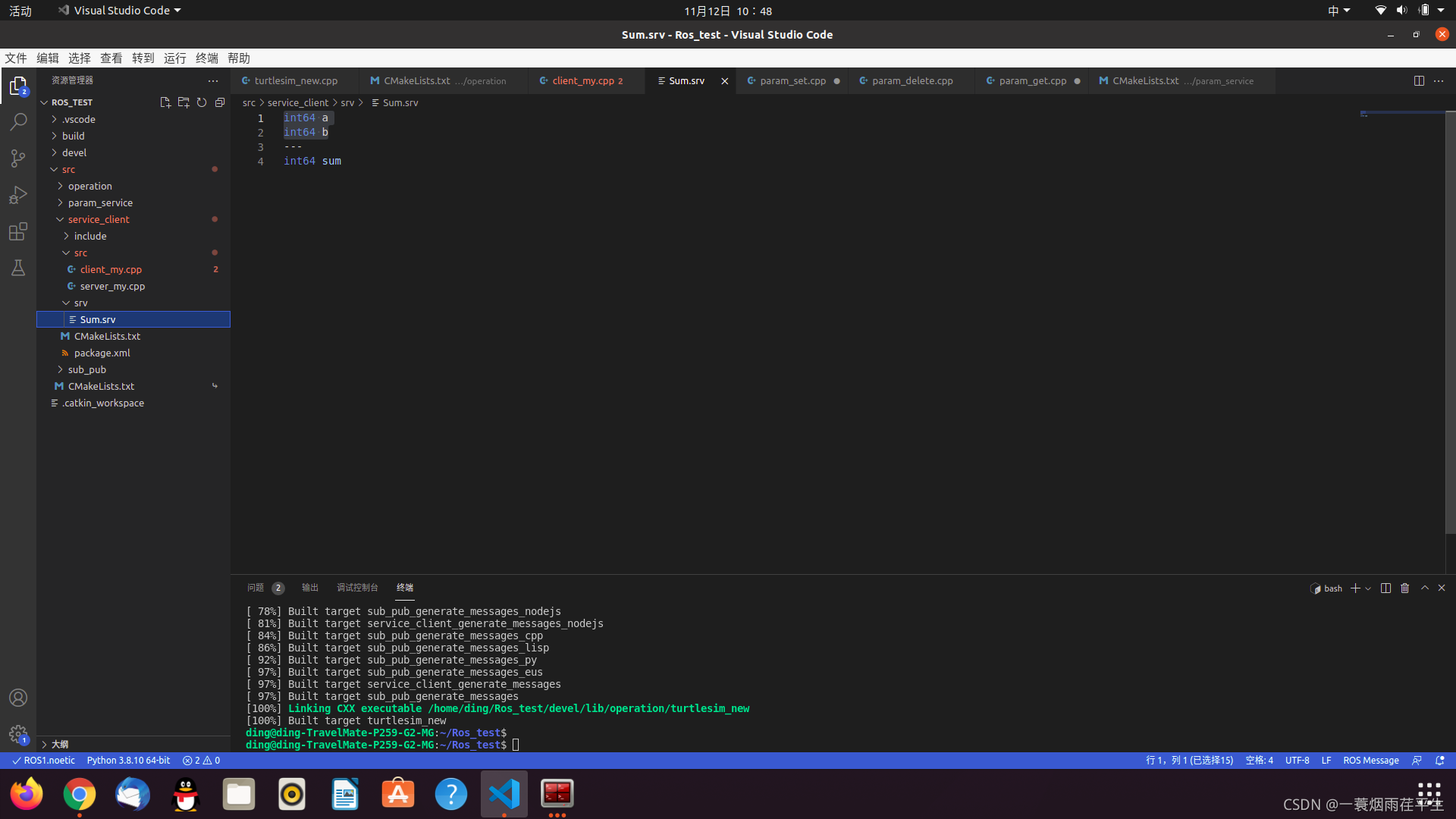
自定义消息类型
首先在功能包下新建srv文件夹,然后创建srv文件 。本次例子是来实现客户端提交两个数,服务端来进行求和。
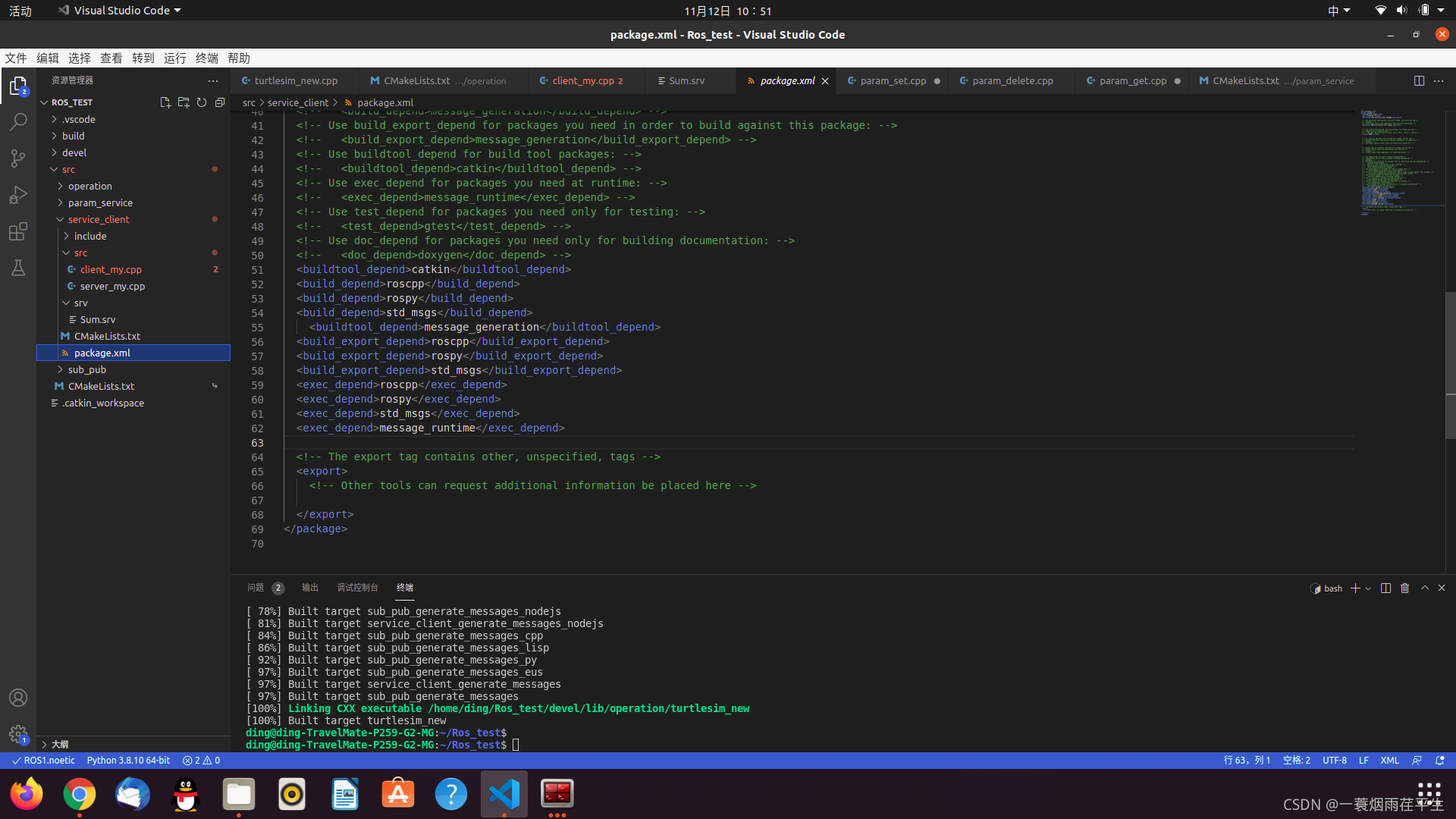
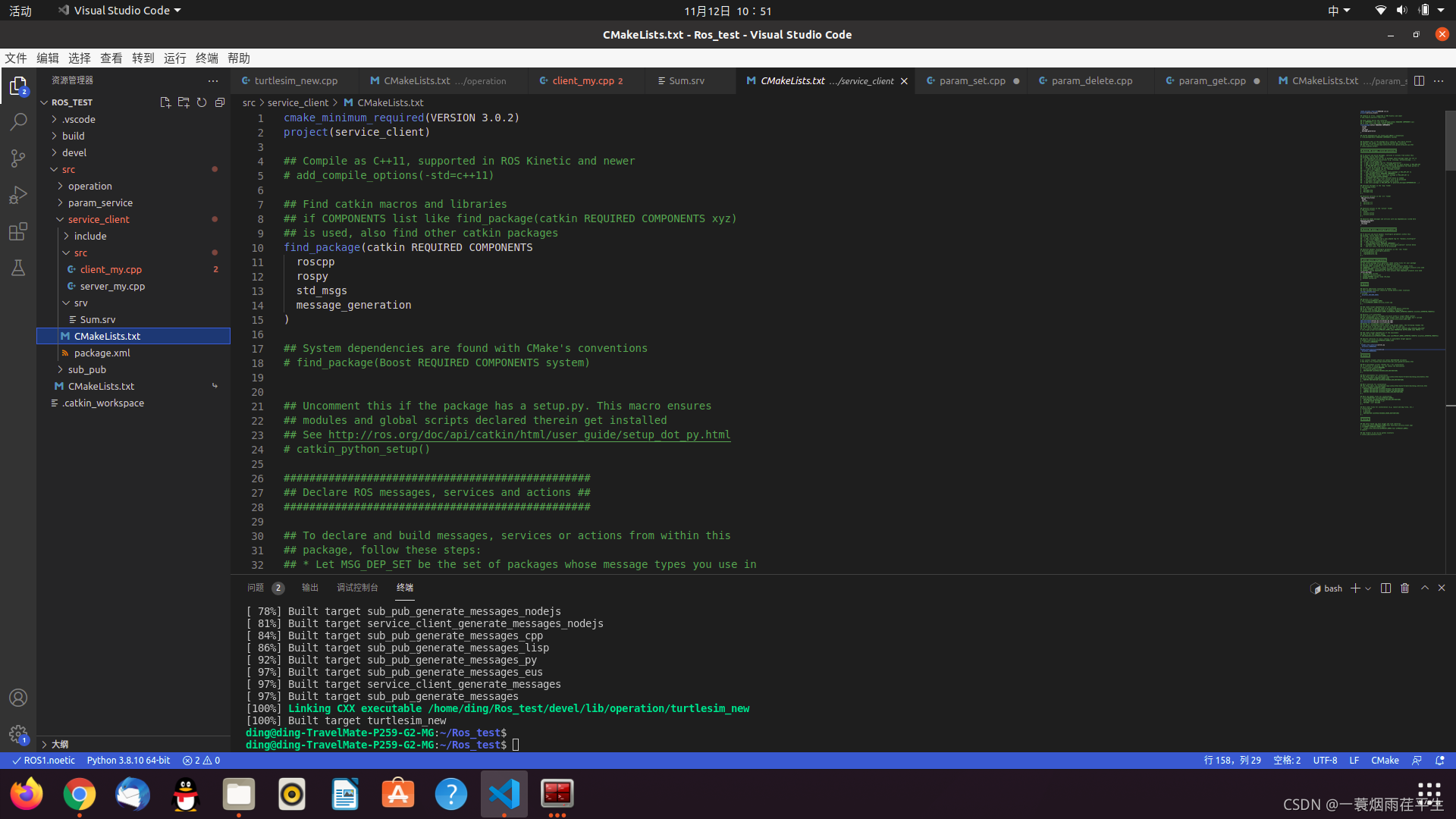
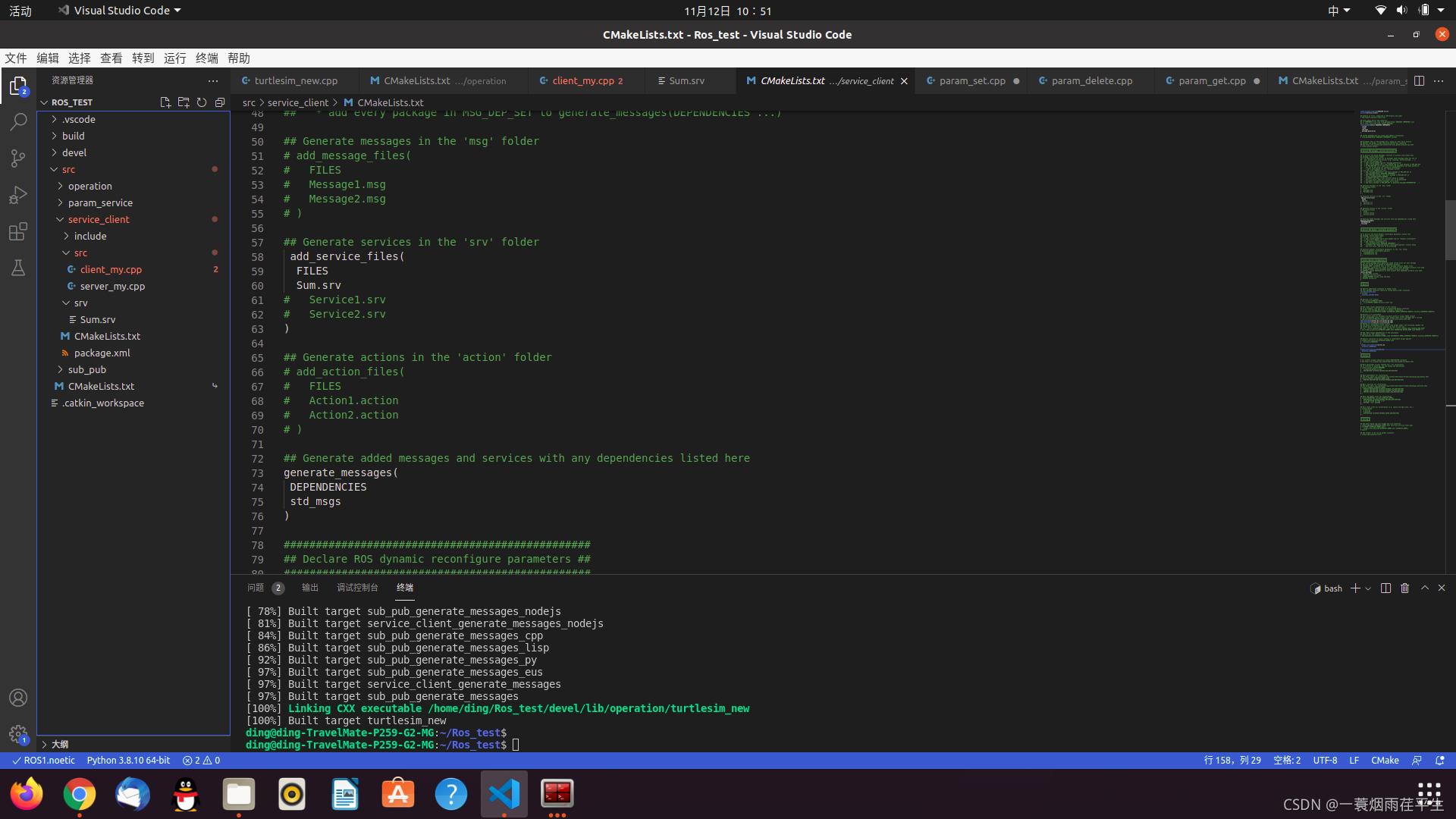
配置文件如下:
订阅方的实现:
#include"ros/ros.h"
#include "service_client/Sum.h" //自定义服务消息类型
#include <cstdlib>
int main(int argc,char *argv[])
{
ros::init(argc,argv,"Sum_client"); //初始化节点
if(argc!=3) //外部输入参数
{
ROS_INFO("failed");
return 1;
}
ros::NodeHandle nh;
ros::ServiceClient sum_client=nh.serviceClient<service_client::Sum>("add_two_ints");//创建用于发布的节点句柄
ros::service::waitForService("add_two_ints");//等待服务端启动
service_client::Sum srv; //创建新的消息
srv.request.a=atoll(argv[1]);
srv.request.b=atoll(argv[2]); /* 把字符串转变成long long 类型*/
/*argv[0] 存储的是节点的路径*/
if(sum_client.call(srv)) //调用服务端,发布数据给服务端,返回值是bool类型
{
ROS_INFO("sun =%ld ",(long int )srv.response.sum);
}
else{
ROS_INFO("failed ");
return 1;
}
return 0;
}
服务方的实现:
#include "ros/ros.h"
#include "service_client/Sum.h"
bool add(service_client::Sum::Request &req,
service_client::Sum::Response &res)//消息中的请求和服务参数指针
{
res.sum=req.a+req.b; //sum是服务端的参数,a,b是客户端发送的消息。
ROS_INFO("request : x=%ld y=%ld",(long int)req.a,(long int)req.b); /*在定义消息类型时用的是64位的longint型*/
ROS_INFO("responce : sum= %ld",(long int)res.sum);
return true;
}
int main(int argc,char*argv[])
{
ros::init(argc,argv,"SUM_server");
ros::NodeHandle nh;
ros::ServiceServer sum_service=nh.advertiseService("add_two_ints",add);//创建句柄函数,调用服务端的函数add
ROS_INFO("ready to add two ints .");
ros::spin();
return 0;
}


















 5661
5661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











